единичной амплитуды с частотой, ределенной по формуле
onto
о (Ч
.)
(3)
W
где , если Sign (б -б) +1 «0 2, если Sign (В-Sg) -1 Гармонические сигналы по формуле (3) образуют вектор напряжения единичной амшштуды, определяемый соотношением
и.
е
J
fco где у ot
cos у + J (k
С0л+
sinjf, d
(4)
.k-)
Изобретение относится к электротехнике и может быть использовано для управления машинами переменного тока, преимущественно синхронными ма шинами С бесщеточным возбуждением.
Целью изобретения является улучшение качества электроэнергии потребителей путем повышения электромеханической устойчивости синхронных машин.
На фиг.1 приведены графики асинхронных моментов и полных токов в якорной обмотке возбудителя;на фиг,2- графики моментов в функции частоты на фиг.З - принципиальная схёма уст- ройства для управления бесщеточной синхронной машиной; на фиг.4 - схема формирователя частоты;на фиг.З фрагмент формирователя частоты с дис, , 9П ныи автоматическим регулятором воз- кретным управлением; на фиг.6 - схе- и
ма регулятора.
Способ управления бесщеточной синхронной машиной Заключается в следующем.
По гармоническим сигналам датчиков положения ротора и напряжения статора синхронной машины формируют сигнал, пропорциональный углу S между какой-либо осью ротора и вектором напряжения сети. При этом, например,. реализуется известное тригонометрическое соотношение
25
x(8-S).t Сигнал управления, сформированбуткдения (это, например, обычный ав томатический регулятор возбуждения с шьного действия типа АРВ-СД) синхронной машины Ur дрс, сз ммируется с сигналом выражения (2):
и
Е
и
йР6
+ и
а
(5)
Далее сигнал по формуле (5) умно JQ жается на единичнь й вектор соотношения (4) и формируется сигнал вектора напряжения возбуждения возбудителя, определяемый соотношением
arcsin (cOjt - tOpt) arc (sin QC t Wpt sin UB t)
где (0,- и CO
P
- частоты напряжения сети и вращения ротора, t - время.
Этот сигнал сравнивают с уставкой Од угла и формируют, например, сигнал пропорционально-дифференциального регулирования по отклонению
и
где
5 -и, ч- (k, k, )(&-S,),(2)
k, k| - коэффициенты регулиро™
вания;
Ug О, если Sign (S -8e) f-l Uo С, если Sign (S-Sg) --1, с const - некоторая постоянная. По аналогии сигналу по выражению (2) формируют гармонические сигналы
М
(сД-Ор) (U и|ь
R - (Q-Up) СО X|T J + R.t(Q-COp) Т
единичной амплитуды с частотой, ределенной по формуле
onto
о (Ч
.)
(3)
где , если Sign (б -б) +1 «0 2, если Sign (В-Sg) -1 Гармонические сигналы по формуле (3) образуют вектор напряжения единичной амшштуды, определяемый соотношением
и.
е
J
fco де у ot
cos у + J (k
С0л+
sinjf, d
(4)
.k-)
x(8-S).t Сигнал управления, сформированныи автоматическим регулятором воз-
буткдения (это, например, обычный автоматический регулятор возбуждения с шьного действия типа АРВ-СД) синхронной машины Ur дрс, сз ммируется с сигналом выражения (2):
и
йР6
+ и
а
(5)
Далее сигнал по формуле (5) умноJQ жается на единичнь й вектор соотношения (4) и формируется сигнал вектора напряжения возбуждения возбудителя, определяемый соотношением
и
ib
и
(6)
Напряжение из соотношения (6) через систему импульсно-фазового управления подается на многофазный ти- ристорный преобразователь частоты, на выходе которого формируется на - пряжение возбуждения возбудителя. Многофазное (например, трехфазное) напряжение с выхода тиристорного пре- образователя частоты подается на неподвижную многофазную обмотку возбуждения возбудителя, создавая вращающееся с частотой по формуле (3) поле возбуждения. Это поле, вращаясь от- носительно расположенной на роторе якорной обмотки возбудителя, подключенной через вращающийся вентильный выпрямитель к обмотке возбуждения синхронной машины, создает дополнительный момент вращения, определяемый соотношением
(7)
где
W С0„ и
iB
и
iel
f
13058214
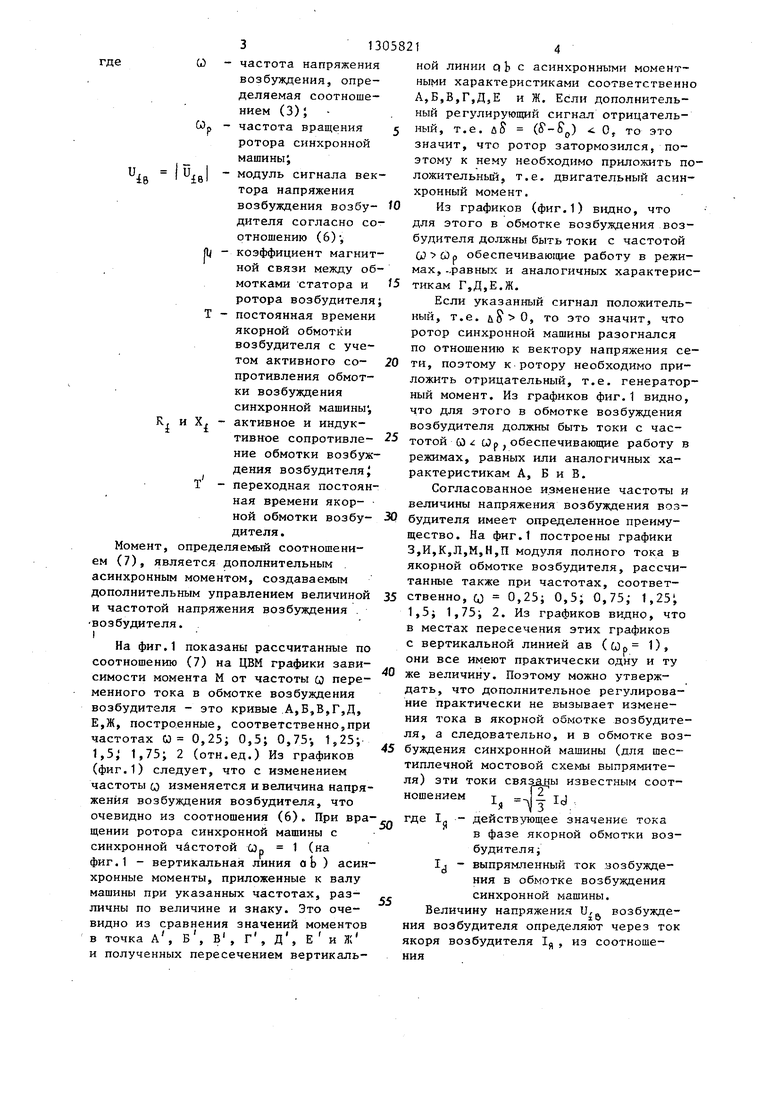
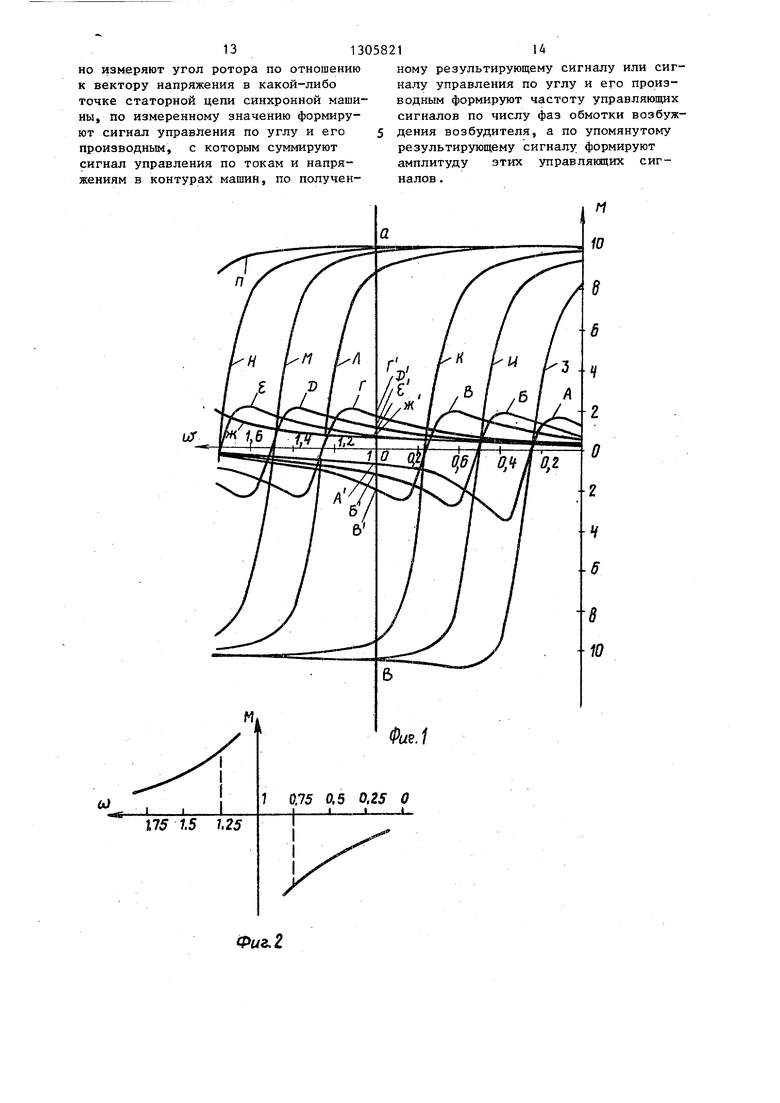
ной линии Qb с асинхронными момент- ными характеристиками соответственно А,Б,В,Г,Д5Е и Ж. Если дополнительный регулирующий сигнал отрицательный, т.е. uS (S -S p) . О, то это значит, что ротор затормозился, поэтому к нему необходимо приложить положительный, т.е. двигательный асинхронный момент.
Из графиков (фиг.1) видно, что для этого в обмотке возбуждения возбудителя должны быть токи с частотой и у и о обеспечиваю 1ще работу в режимах, ..равных и аналогичных характерисмотками статора и 5 тикам Г,Д,Е.Ж.
ротора возбудителя; Если указанный сигнал положительчастота напряжения возбуждения, определяемая соотношением (3);
частота вращения ротора синхронной машины;
модуль сигнала вектора напряжения возбуждения возбу- Ю дителя согласно соотношению (6), коэффициент магнитной связи между .
Т R, и X, Т постоянная времени якорной обмотки возбудителя с учетом активного сопротивления обмотки возбуждения синхронной машины , активное и индуктивное сопротивление обмотки возбуждения возбудителя переходная постоянная времени якорный ,
т.е. U
о.
то это значит, что
ротор синхронной машины разогнался по отношению к вектору напряжения се- 20 ти, поэтому к ротору необходимо при25
дителя.
Момент, определяемый соотношением (7), является дополнительным . асинхронным моментом, создаваемым дополнительным управлением величиной и частотой напряжения возбуждения .
возбудителя. I
ложить отрицательный, т.е. генераторный момент. Из графиков фиг.1 видно, что для этого в обмотке возбуждения возбудителя должны быть токи с частотой (О Up,обеспечивающие работу в режимах, равных или аналогичных характеристикам А, Б и В.
Согласованное изменение частоты и величины напряжения возбуждения воз- ной обмотки возбу- 30 будиталя имеет определенное преимущество. На фиг.1 построены графики 3,И,К,Л,М,Н,П модуля полного тока в якорной обмотке возбудителя, рассчитанные также при частотах, соответ35 ственно, у 0,25; 0,5; 0,75; 1,25, 1,5; 1,75; 2. Из графиков виднр, что в местах пересечения этих графиков с вертикальной линией ав (С0р 1), они все имеют практически одну и ту
40 же величину. Поэтому можно утверждать, что дополнительное регулирование практически не вызывает изменения тока в якорной обмотке возбудителя, а следовательно, и в обмотке воз45 буждения синхронной машины (для шес- типлечной мостовой схемы выпрямителя) эти токи связаны известным соотНа фиг.1 показаны рассчитанные по соотношению (7) на ЦВМ графики зависимости момента М от частоты Q переменного тока в обмотке возбуждения возбудителя - это кривые.А,Б,В,Г,Д, Е,Ж, построенные, соответственно,при частотах СО 0,25; 0,5; 0,75-, 1.,25; 1,5 1,75; 2 (отн.ед.) Из графиков (фиг.1) следует, что с изменением частоты (J изменяется и величина напряжения возбуждения возбудителя, что очевидно из соотношения (6). При вращении ротора синхронной машины с синхронной чистотой (Ор 1 (на фиг.1 - вертикальная линия аЬ ) асинхронные моменты, приложенные к валу машины при указанных частотах, разId
50
ношением
где I,, - действующее значение тока н
55
в фазе якорной обмотки возбудителя;
J - выпрямленный ток возбуждения в обмотке возбуждения синхронной машины.
55
личны по величине и знаку. Это очевидно из сравнения значений моментов кия возбудителя определяют через ток
Величину напряжения U, возбуждев точка А , Б , В , г , Д , Е и Ж и полученных пересечением вертикальякоря возбудителя 1д, из соотношения
Если указанный сигнал положительный ,
т.е. U
о.
то это значит, что
ротор синхронной машины разогнался по отношению к вектору напряжения се- 20 ти, поэтому к ротору необходимо приId
ношением
где I,, - действующее значение тока н
в фазе якорной обмотки возбудителя;
J - выпрямленный ток возбуждения в обмотке возбуждения синхронной машины.
кия возбудителя определяют через ток
Величину напряжения U, возбуждеякоря возбудителя 1д, из соотношения
и
±ь
- Qjl - fa-tJp)u () т
(O-Wp)p
Подставив соотношение (В) в (7), получают
2 XQJ
() |U (9)
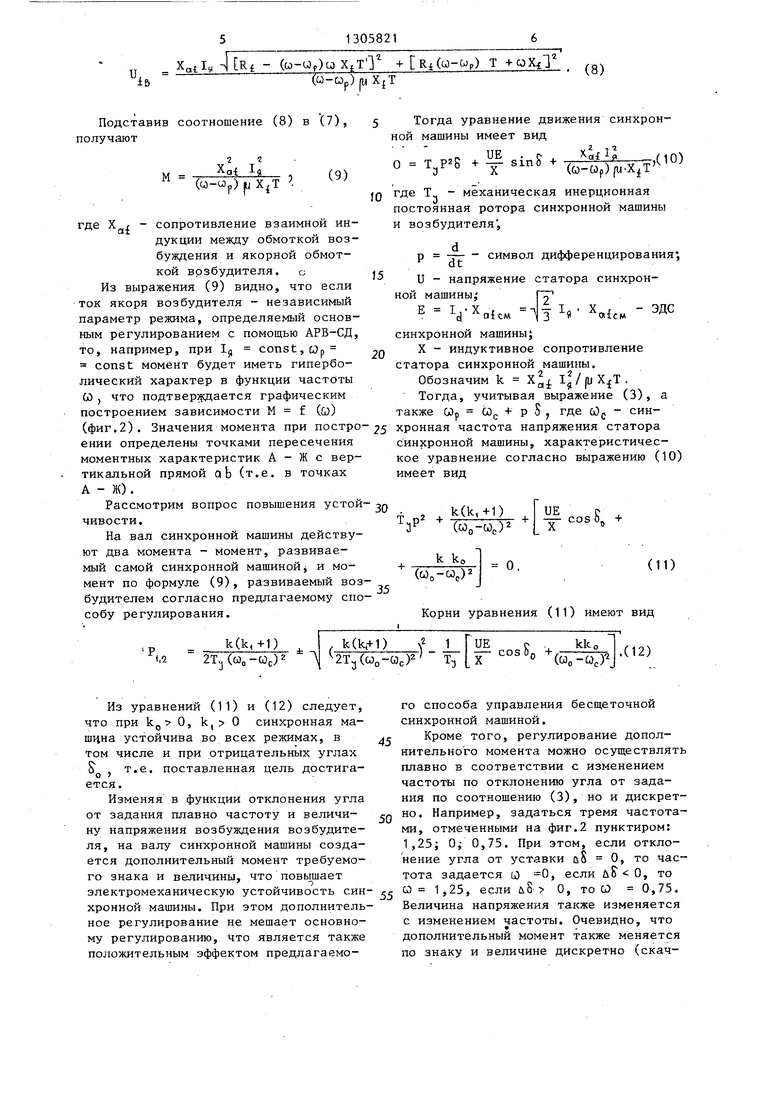
где X f - сопротивление взаимной индукции между обмоткой возбуждения и якорной обмоткой возбудителя. с Из выражения (9) видно, что если ток якоря возбудителя - независимый параметр режима, определяемый основным регулированием с помощью АРВ-СД, то, например, при const, Wp const момент будет иметь гиперболический характер в функции частоты СО, что подтверждается графическим построением зависимости М f (cj) (фиг.2). Значения момента при построении определены точками пересечения моментных характеристик А - Ж с вертикальной прямой аЬ (т.е. в точках А - Ж).
Рассмотрим вопрос повышения устойчивости.
На вал синхронной машины действуют два момента - момент, развиваемый самой синхронной машинойj и момент по формуле (9), развиваемый воз будителем согласно предлагаемому способу регулирования.
(.+1) ч.-г 2T.,(Qo-coJ2
k(k.-H
2T.j(Uc
Из уравнений (11) и (12) следует, что при kp О, k, О синхронная ма- шцна устойчива во всех режимах, в том числе и при отрицательных углах , т.е. поставленная цель достигается .
Изменяя в функции отклонения угла от задания плавно частоту и величину напряжения возбуждения возбудителя, на валу синхронной машины создается дополнительный момент требуемого знака и величины, что повышает электромеханическую устойчивость синхронной машины. При этом дополнительное регулирование не мешает основному регулированию. Что является также положительным эффектом предлагаемо(8)
5 Тогда уравнение движения синхронной машины имеет вид
О Т + -„- sinS + T rfferT o 3 X чо-сор; fU X.(.i
Q где Т„ - механическая инерционная постоянная ротора синхронной машины и возбудителя ,
р -т- - СИМВОЛ дифференцирования,
и - напряжение статора синхронной машины гт
Е 1 -Хо{е« 1з « «fc - Д синхронной машины;
0 X - индуктивное сопротивление статора синхронной машины.
Обозначим k Х.. .fT.
Тогда, учитывая выражение (3), а также ОЗр СОр + р S , где cOg - син- 25 хронная частота напряжения статора синхронной машины, характеристическое уравнение согласно выражению (10) имеет вид
0 k(k,-И) Г UE с
V -( k ko
(W.-Ч)
0.
(11)
Корни уравнения (11) имеют вид
) 1 fUE р . kko 1 .o
r), +,J.(12)
го способа управления бесщеточной синхронной машиной.
Кроме того, регулирование дополнительного момента можно осуществлять плавно в соответствии с изменением частоты по отклонению угла от задания по соотношению (3), но и дискретно. Например, задаться тремя частотами, отмеченными на фиг.2 пунктиром: 1,25; 0; 0,75. При этом, если отклонение угла от уставки aS О, то частота задается LO 0, если йВ О, то
СО 1,25, если л8 О, то 0) 0,75. Величина напряжения также изменяется с изменением частоты. Очевидно, что дополнительный момент также меняется по знаку и величине дискретно (скачком). Длительность импульса момента определяется только соотношением д8 0. Здесь можно сделать и с зоной нечувствительности, задав, например, при -a- AS -ia со О, при и S : -а со 1,25, при СО 0,75.
Во всех рассмотренных случаях реализации способа эффект - повышение устойчивости синхронной машины.
Согласно изобретению способ уп- равления бесщеточной синхронной машиной представляет собой следующую последовательность операций: измерение токов и напряжений в контурах машины:
формирование сигнала управле- 5 ла соединены с входами регулятора 17,
ния автоматическим регулятором возбуждения (АРВ), например, сильного действия; измерение угла и скол-ьже- ния ротора по отношению к вектору напряжения в какой-либо точке статорной20 кого регулятора 9 возбуждения, Выхо
цепи синхронной машины; формирование сигнала управления по углу и скольжению, суммирование сигнала управления по углу и скольжению с сигналом управления автоматического регулятора возбуждения; формирование частоты управляющих сигналов по числу фаз обмотки возбуждения возбудителя по полученному |)езультирующему (суммарному) сигналу или сигналу управления по углу и скольжению; формирование амплитуды этих управляющих сигналов по числу фаз обмотки возбуждения возбудителя по упомянутому суммарному сигналу.
Таким образом, благодаря созданию на валу возбудителем дополнительного момента требуемой величины и знака расширяется область устойчивости CKH- хронной машины, конкретно - в режимах недовозбуждения и- отрицательного возбуждения. В последнем случае величина потребляемой реактивной мощности возрастает на 20% по сравнению с ве- личиной, обеспечиваемой известными способами.
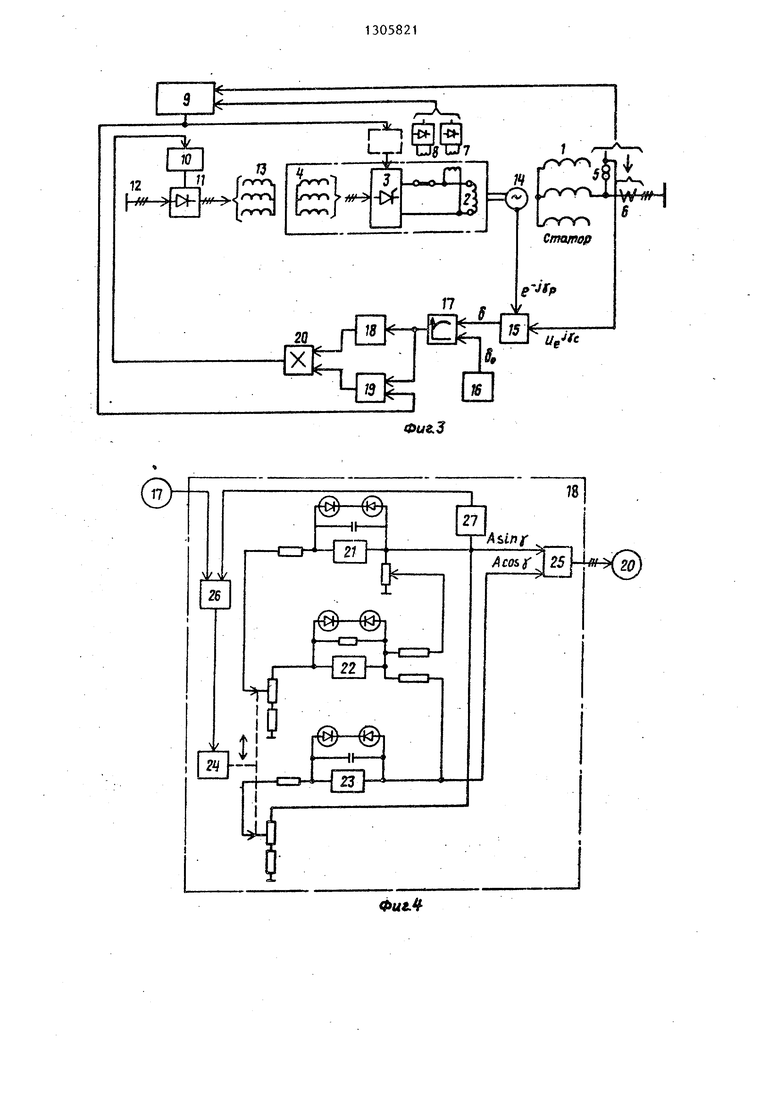
Предлагаемый способ может быть реализован при помощи устройства по фиг,2.
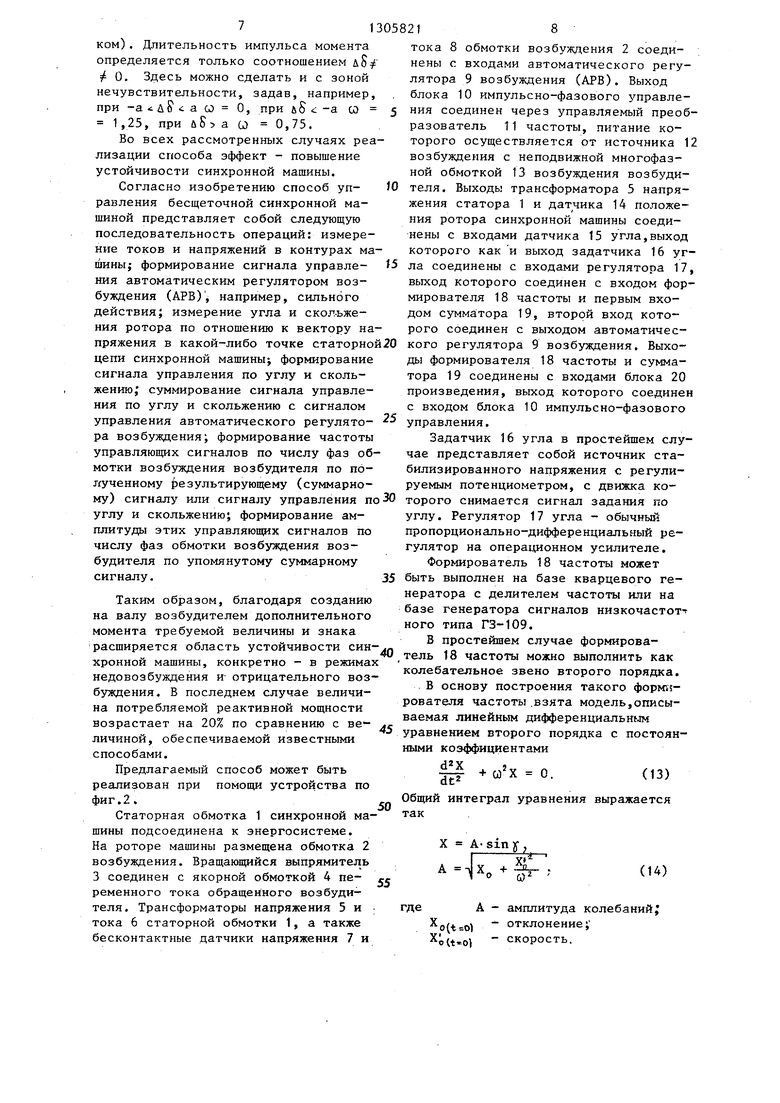
Статорная обмотка 1 синхронной машины подсоединена к энергосистеме, На роторе машины размещена обмотка 2 возбуждения. Вращающийся выпрямитель 3 соединен с якорной обмоткой 4 переменного тока обращенного возбудителя. Трансформаторы напряжения 5 и тока 6 статорной обмотки 1, а также бесконтактные датчики напряжения 7 и
тока 8 обмотки возбуждения 2 соединены с входами автоматического регулятора 9 возбуждения (АРВ). Выход блока 10 импульсно-фазового управления соединен через управляемый преобразователь t1 частоты, питание которого осуществляется от источника 12 возбуждения с неподвижной многофазной обмоткой 13 возбуждения возбудителя. Выходы трансформатора 5 напряжения статора 1 и датчика 14 положения ротора синхронной машины соединены с входами датчика 15 угла,выход которого как и выход задатчика 16 угвыход которого соединен с входом формирователя 18 частоты и первым входом сумма;тора 19, второй вход которого соединен с выходом автоматичес5
0 5
Q
0
ды формирователя 18 частоты и сумматора 19 соединены с входами блока 20 произведения, выход которого соединен с входом блока 10 импульсно-фазового управления,
Задатчик 16 угла в простейшем случае представляет собой источник стабилизированного напряжения с регулируемым потенциометром, с движка которого снимается сигнал задания по углу. Регулятор 17 угла - обычный пропорционально-дифференциальный регулятор на операционном усилителе.
Формирователь 18 частоты может быть выполнен на базе кварцевого генератора с делителем частоты или на базе генератора сигналов низкочастот- ного типа ГЗ-109,
В простейшем случае формирователь 18 частоты можно выполнить как колебательное звено второго порядка,
В основу построения такого формь - рователя частоты .взята модель,описываемая линейным дифференциальтлм уравнением второго порядка с постоянными коэффициентами
IP +о) х 0. (13)
Общий интеграл уравнения выражается так
X А
А-sin у,
4
-V- сЗ
(14)
o(
Г olt-0}
А - амплитуда колебаний;
-отклонение;
-скорость.
9130
Очевидно, что математическая модель для решения уравнения (13) может служить генератором перйодичес- , ких колебаний.
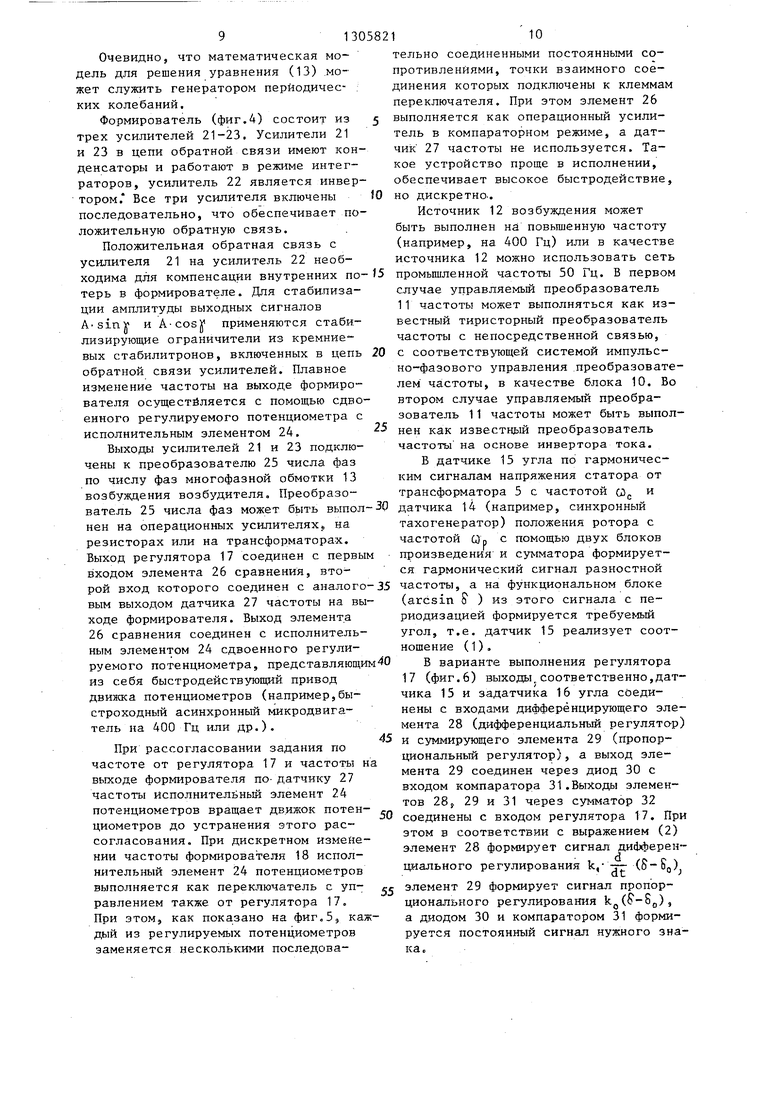
Формирователь (фиг.4) состоит из трех усилителей 21-23, Усилители 21 и 23 в цепи обратной связи имеют конденсаторы и работают в режиме интеграторов, усилитель 22 является инвертором. Все три усилителя включены последовательно, что обеспечивает положительную обратную связь.
Положительная обратная связь с усилителя 21 на усилитель 22 необходима для компенсации внутренних по- терь в формирователе. Для стабилизации амплитуды выходных сигналов А sin у и A-cosV применяются стабилизирующие ограничители из кремниевых стабилитронов, включенных в цепь обратной связи усилителей. Плавное изменение частоты на выходе формиро вателя осущестйляется с помощью сдвоенного регулируемого потенциометра с исполнительным элементом 24.
Выходы усилителей 21 и 23 подключены к преобразователю 25 числа фаз по числу фаз многофазной обмотки 13 возбуждения возбудителя. Преобразователь 23 числа фаз может быть выпол ней на операционных усилителях,, на резисторах или на трансформаторах. Выход регулятора 17 соединен с первы входом элемента 26 сравнения, второй вход которого соединен с аналоге вым выходом датчика 27 частоты на выходе формирователя. Выход элемента 26 сравнения соединен с исполнительным элементом 24 сдвоенного регулируемого потенциометра, представляющи из себя быстродействующий привод двияжа потенциометров (например,быстроходный асинхронный микродвигатель на 400 Гц или др.).
При рассогласовании задания по
частоте от регулятора 17 и частоты н выходе формирователя по- датчику 27 частоты исполнительный элемент 24 потенциометров вращает движок потен- циометров до устранения этого рассогласования. При дискретном измейе- нии частоты формирователя 18 исполнительный элемент 24 потенциометров выполняется как переключатель с уп- равлением также от регулятора 17. При этом, как показано на фиг,5, каждый из регулируемых потенциометров заменяется несколькими последова10
тельно соединенными постоянными сопротивлениями, точки взаимного соединения которых подключены к клеммам переключателя. При этом элемент 26 выполняется как операционный усилитель в компараторном режиме, а датчик 27 частоты не используется. Такое устройство проще в исполнении, обеспечивает высокое быстродействие, но дискретно..
Источник 12 возбуждения может быть выполнен на повьпиенную частоту (например, на 400 Гц) или в качестве источника 12 можно использовать сеть промьшленной частоты 50 Гц. В первом случае уцравляемьй преобразователь 11 частоты может выполняться как известный тиристорный преобразователь частоты с непосредственной связью, с соответствующей системой импульс- но-фазового управления преобразователем частоты, в качестве блока 10. Во втором случае управляемый преобразователь 11 частоты может быть выполнен как известный преобразователь частоты на основе инвертора тока.
В датчике 15 угла по гармоническим сигналам напряжения статора от трансформатора 5 с частотой Q и датчика 14 (например, синхронный тахогенератор) положения ротора с частотой QP с помощью двух блоков произведения и сумматора формируется гармонический сигнал разностной частоты, а на функциональном блоке (arcsin ) из этого сигнала с периодизацией формируется требуемый угол, т.е. датчик 15 реализует соотношение (1) .
В варианте выполнения регулятора 17 (фиг.6) выходы.соответственно,датчика 15 и задатчика 16 угла соединены с входами дифференцирующего элемента 28 (дифференциальный регулято-р и суммирующего элемента 29 (пропорциональный регулятор), а выход элемента 29 соединен через диод 30 с входом компаратора 31.Выходы элементов 28;, 29 и 31 через сумматор 32 соединены с входом регулятора 17, Пр этом в соответствии с выражением (2) элемент 28 формирует сигнал дифференциального регулирования k, т- (5- Sg)
элемент 29 формирует сигнал пропорционального регулирования kjj(6 -8j,), а диодом 30 и компаратором 31 формируется постоянный сигнал нужного знака с
Устройство реализует предлагаемый способ следующим образом.
По гармоническим сигналам трансформатора 5 напряжения и датчика 14 положения ротора в датчике 15 угла формируется сигнал в соответствии с выражением (1), пропорциональный углу, например, между поперечной осью ротора синхронной машины и вектором напряжения ее статора. Сигналы угла от датчика 15 и задатчика 16 угла поступают в регулятор 17. При работе синхронной машины в режиме, напри- мер, компенсатора с отрицательным возбуждением задатчиком 16 формируют сигнал, соответствующий нулевому значению угла. При отклонении угла от задания регулятор 17 формирует пропорционально-дифференциальный сигнал в соответствии с выражением (2) по этому отклонению, который поступает в формирователь 18 частоты.
Формирователь 18 частоты по сигналу по формуле (3) формирует гармонические сигналы по формуле (4) задан- ной амплитуды по числу фаз обмотки 13 возбудителя. Формирование задания по напряжению осуществляется в сумматоре 19 по двум сигналам в соответствии с выражением (5) : по сигналу основного регулирования АРВ 9 и по дополнительному сигналу регулятора 17 В блоке 20 произведения сигналы с формирователя 18 частоты и сумматора 19 перемножаются и на его выходе формируется вектор напряжения управления по формуле (6) заданной амплитуды и частоты по числу фаз обмотки 13.
Напряжение управления подается на вход блока 10 импульсно-фазового уп- равления преобразователем 11 частоты, что обеспечивает протекание по многофазной обмотке 13 возбуждения переменного тока требуемой величины. Этот ток является током возбуждения возбудителя, величина и частота которого определяется АРВ 9 (он формирует основной сигнал управления по данным датчиков напряжения 5, 7 и тока 6,8 и обеспечивает уровень напряжения на статоре 1 машины в соответствии с. уставкой) и регулятором 17 с элементами 18 и 19 (они формируют дополнительные сигналы управления по частоте и напряжению по данным датчика 15 угла). Благодаря дополнительному регулированию поле неподвижной обмотки 13 возбудителя вращается по отfO 5 20
-30 35
40 0
5
ношению к якорной обмотке А возбудителя и тем самым создает дополнительный асинхронньш момент на валу синхронной машины, величина и знак которого однозначно определяются сигналом на выходе регулятора 17.
Положительным эффектом предлагаемого способа является то, что благодаря созданию в возбудителе дополнительного момента на валу требуемой величины и знака расширяется область устойчивости синхронной машины, конкретно - в режимах недовозбужде- ния и. отрицательного возбуждения. При этом в последнем случае величина потребляемой реактивной мощности возрастает на 20% по сравнению с величиной, обеспечиваемой известными способами. Так, при применении синхронного компенсатора мощностью 320 МВД это эквивалентно тому, что высвобождается устанавливаемый для режимов потребления дополнительный компенсатор мощностью 320 -0,2 64 МВД.
Изобретение может применяться на всех машинах переменного тока с возбудительной машиной на валу, в том числе на машинах: явнополюсных и неяв- нополюсных, со щеточным и бесщеточным возбуждением, со знакопеременным возбуждением в одной обмотке возбуждения машины и с двумя обмотками возбуждения и двумя возбудителями, с тиристорным и диодным вращающимся выпрямителем обмотки возбуждения синхронной машины.
При применении предлагаемого способа в принципе можно отказаться от знакопеременного возбуждения, что в целом упростит систему возбуждения синхронной машины.
Формула изобретения
Способ управления бесщеточной синхронной машиной с подключенной к энергосистеме статорной обмоткой путем регулирования напряжения управлением преобразователем частоты в цепи многофазной обмотки возбуждения возбудителя, при котором измеряют Токи и напряжения в контурах машин, по которым формируют сигнал управления возбуждением, отличающийся тем, что, с целью улучшения качества электроэнергии потребителей путем повышения электромеханической устойчивости синхронной машины, дополнительно измеряют угол ротора по отношению к вектору напряжения в какой-либо точке статорной цепи синхронной машины, по измеренному значению формируют сигнал управления по углу и его производным, с которым суммируют сигнал управления по токам и напряжениям в контурах машин, по полученному результирующему сигналу или сигналу управления по углу и его производным формируют частоту управляющих сигналов по числу фаз обмотки возбуждения возбудителя, а по упомянутому результирующему сигналу формируют амплитуду этих управляющих сигналов .
/1
ИГ
Фиг. 2
Фиг.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1686595A1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| Способ управления возбуждением бесщеточной электрической машины и устройство для его осуществления | 1979 |
|
SU974544A1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Устройство для управления синхронной машиной | 1979 |
|
SU900398A1 |

Изобретение относится к электротехнике. Цель изобретения - улучшение качества электроэнергии потребителей путем повышения электромеханической устойчивости синхронной машины. Для этого регулирование напряжения осушествляют управлением преобразователем частоты в цепи многофазной обмотки возбуждения возбудителя. Частоту управляющих сигналов по числу фаз обмотки возбуждения формируют или по сумме сигналов, один из которых пропорционален токам и напряжениям в контурах машин, а другой - углу ротора по отношению к вектору напряжения в какой-либо точке ста- торной цепи синхронной машины и его производным, или по сигналу, пропорциональному углу ротора по отношению к вектору напряжения в какой-либо точке статорной цепи. Амплитуду управляющих сигналов формируют по упомянутой сумме сигналов. 6 ил. ю СО с сд 00 ю
Фиг.
Фиг.5
Редактор А. Шандор
Составитель К. Фотина
Техред А.Кравчук Корректор А.Зимокосов
1463/53
Тираж 661 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб„, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная,4
-и «
Фиг.5
| Устройство для бесщеточного возбуждения синхронной машины | 1976 |
|
SU652673A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для возбуждения машины переменного тока | 1974 |
|
SU550753A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для пуска и реверсивного бесщеточного возбуждения синхронной машины | 1974 |
|
SU547957A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
