Изобретение относится к электротехнике, а точнее к способам регулирования частоты вращения ротора вентильного двигателя, содержащего синхронную машину с тиристорным коммутатором в цепи статора, и может быть использовано, например, для частотного пуска газотурбинных установок, в процессе которого требуется изменение частоты вращения вала по заданной программе.
Известен способ регулирования частоты вращения ротора вентильного двигателя, при котором изменяют угол управления тиристорным коммутатором в функции ошибки по частоте вращения.
При использовании этого способа коэффициент мощности на входе вентильного двигателя изменяется пропорционально моменту нагрузки на валу вентильного двигателя. В результате вентильный двигатель
имеет низкие энергетические характеристики при изменении момента нагрузки в широких пределах.
Наиболее близким по технической сущности к изобретению является способ регулирования частоты вращения ротора вентильного двигателя, содержащего синхронную машину с тиристорным коммутатором в цепи статора, при котором выделяют ошибку по частоте вращения как разность между заданной и текущей частотами вращения и изменяют в функции ошибки по частоте вращения ток на входе вентильного двигателя в диапазоне от нуля до заданного максимального значения.
Недостатком этого способа являете пониженное быстродействие при отработке скачка задания по частоте вращения. Если в системе автоматического регулирования частоты вращения, реализующей данный способ, используется задатчик темпа, то максимальное быстродействие достигается только при постоянном моменте нагрузки, соответствующем настройке задатчика темпа. Если задатчик темпа отсутствует, то по достижении заданной частоты вращения при сходе с ограничения имеет место большое перерегулирование по частоте вращения.
Цель изобретения - повышение быстродействия.
Поставленная цель достигается тем, что при регулировании частоты вращения ротора вентильного двигателя, содержащего Синхронную машину с тиристорным коммутатором в цепи статора, согласно способу, при котором выделяют ошибку по частоте вращения как разность между заданной и текущей частотами вращения и изменяют в функции ошибки по частоте вращения ток на входе вентильного двигателя в диапазоне от нуля до заданного максимального значения, кроме этого, задают уставку, сравнивают ошибку с заданной уставкой, определяют знак ошибки и, если модуль ошибки превышает уставку, то устанавлива- ют ток на входе вентильного двигателя рэв- ным либо заданному максимальному значению, либо нулю, так, чтобы в процессе последующего изменения частоты вращения ротора вентильного двигателя ошибка изменила свой знак на противоположный, а модуль ошибки поочередно принял значения, равные заданной уставке, нулю, вновь заданной уставке и вновь нулю, измеряют длительности двух интервалов времени, в течение каждого из которых модуль ошибки уменьшается от уставки до нуля, вычисляют по заданному максимальному значению тока и по измеренным длительностям интервалов времени.расчетный ток на входе вентильного двигателя, необходимый для стабилизации частоты вращения ротора вентильного двигателя на заданном
уровне, и осуществляют указанное регулирование тока на входе вентильного двигателя, задав начальный ток равным расчетному току.
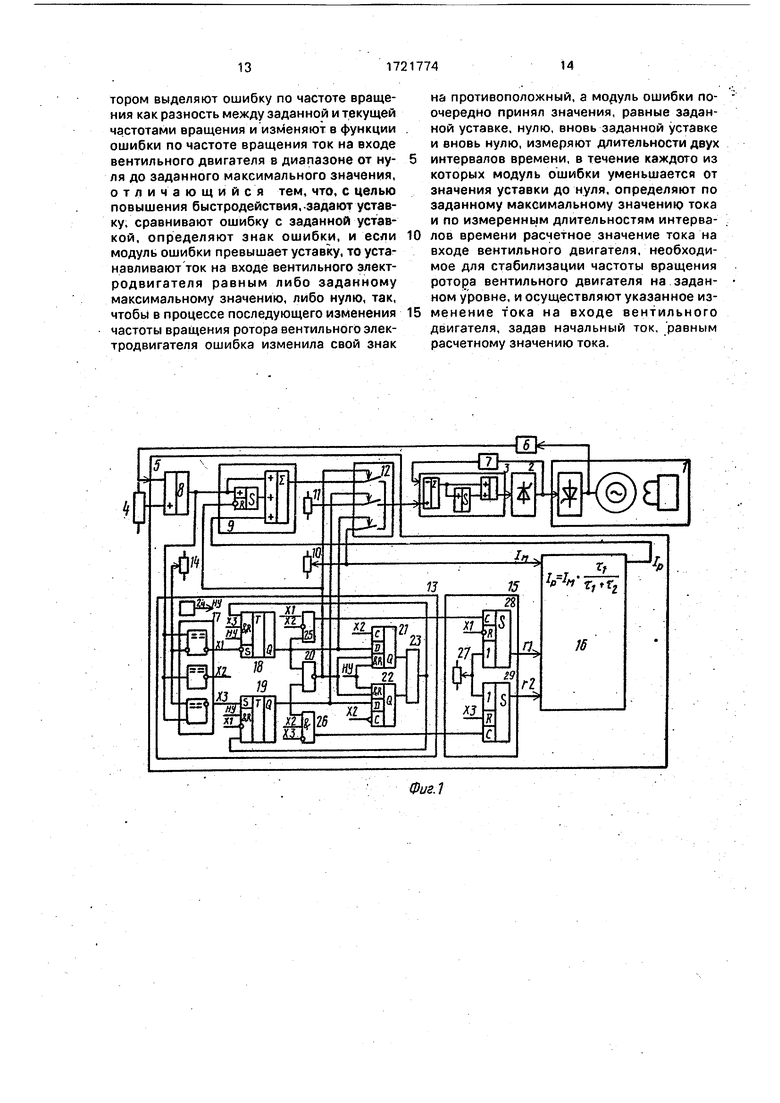
На фиг.1 приведена схема устройства,
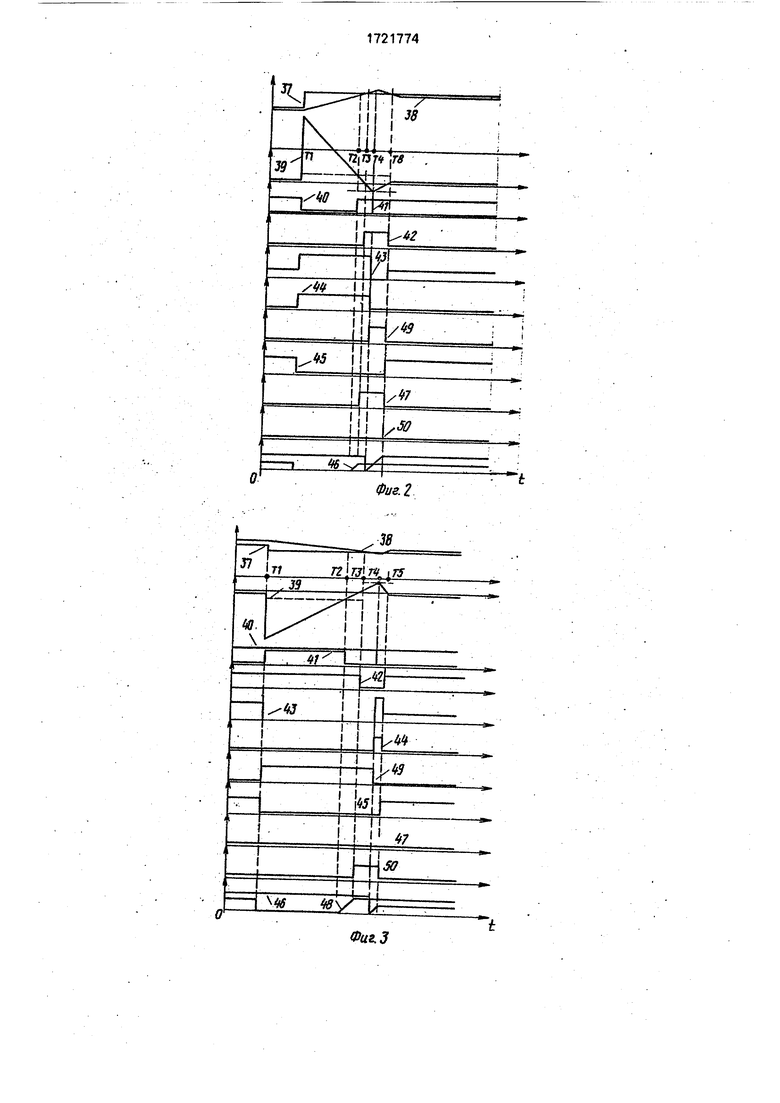
0 реализующего способ регулирования частоты вращения ротора вентильного двигателя; на фиг.2 и 3 - временные диаграммы его работы; на фиг.4 - функциональная схема вычислителя расчетного значения тока.
5 Устройство для регулирования частоты вращения ротора двигателя 1 содержит регулируемый источник 2 постоянного тока, выход которого подключен к входу вентильного двигателя 1, а управляющий вход сое0 динен с выходом регулятора 3 тока, задатчик 4 частоты вращения, выход Которого связан с первым входом регулятора 5 частоты вращения, датчик 6 частоты вращения, выход которого соединен с вторым
5 входом регулятора 5 частоты вращения, датчик 7 тока, выход которого связан с первым входом регулятора 3 тока, второй вход которого подключен к выходу регулятора 5 частоты вращения. Регулятор 5
0 включает в себя сумматор 8, входы которого являются входами регулятора 5, пропорционально-интегральный регулятор 9 со схемой установки начальных условий, вход которого соединен с выходом сумматора 8,
5 зздатчик 10 максимального тока, источник 11 отрицательного задания, трехканальный коммутатор 12, входы которого соединены с выходами соответственно пропорционально-интегрального регулятора 9, источника
0 11 отрицательного задания и задатчика 10 максимального тока, а выход является выходом регулятора частоты вращения, формирователь 13 сигналов управления, входы которого связаны соответственно с
5 выходами сумматора 8 и задатчика 14 уставки, а первый, второй и третий выходы - с управляющими входами трехкэнального коммутатора 12 и с управляющим входом пропорционально-интегрального регулято0 ра 9, измеритель 15 временных интервалов, входы которого соединены с четвертым, пятым, шестым и седьмым выходами формирователя 13 сигналов управления, а выходы подключены соответственно
5 к первому и второму входам вычислителя 16 расчетного тока, третий вход.которого соединен с выходом задатчика 10 максимального тока, а выход связан с входом задания начальных условий пропорционально-интегрального регулятора 9.
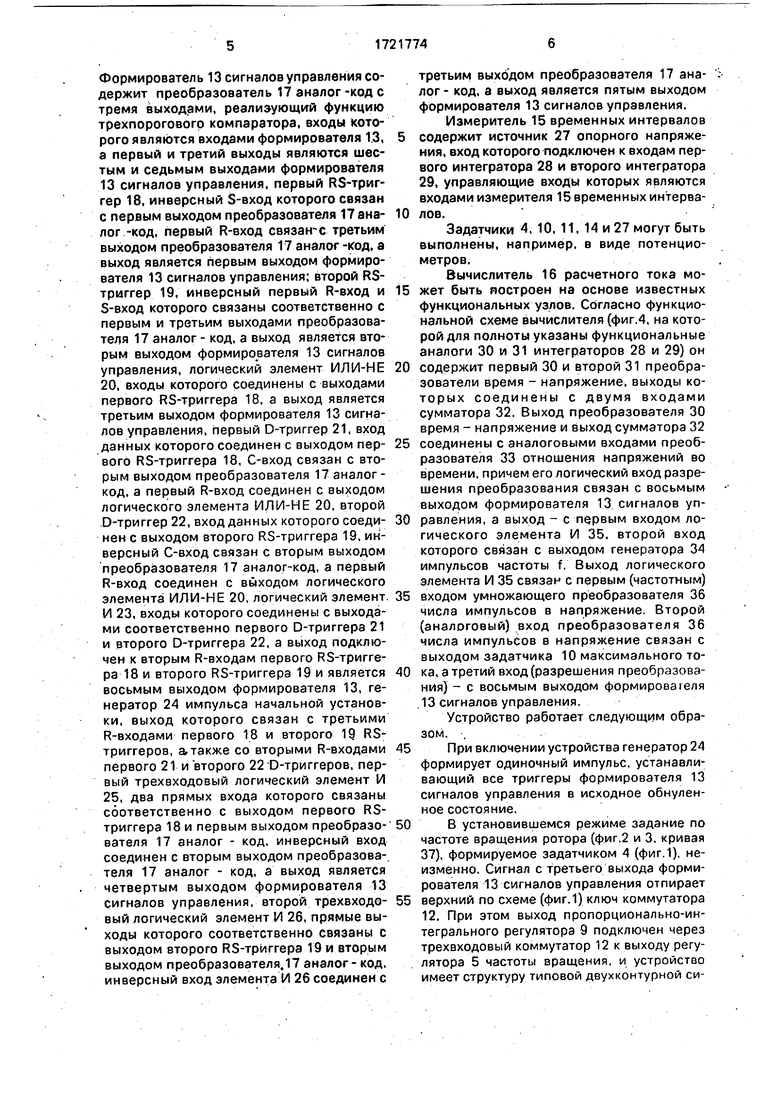
Формирователь 13 сигналов управления содержит преобразователь 17 аналог-код с тремя выходами, реализующий функцию трехпороговогр компаратора, входы которого являются входами формирователя 13, а первый и третий выходы являются шестым и седьмым выходами формирователя 13 сигналов управления, первый RS-триг- гер 18, инверсный S-вход которого связан с первым выходом преобразователя 17 ана- лог -код, первый R-вход связан с третьим выходом преобразователя 17 аналог -код, а выход является первым выходом формирователя 13 сигналов управления; второй RS- триггер 19, инверсный первый R-вход и S-вход которого связаны соответственно с первым и третьим выходами преобразователя 17 аналог - код, а выход является вторым выходом формирователя 13 сигналов управления, логический элемент ИЛИ-НЕ 20, входы которого соединены с выходами первого RS-триггера 18, а выход является третьим выходом формирователя 13 сигналов управления, первый D-триггер 21, вход данных которого соединен с выходом пер- вого RS-триггера 18, С-вход связан с вторым выходом преобразователя 17 аналог- код. а первый R-вход соединен с выходом логического элемента ИЛИ-НЕ 20, второй D-триггер 22, вход данных которого соеди- нен с выходом второго RS-триггера 19, инверсный С-вход связан с вторым выходом преобразователя 17 аналог-код, а первый R-вход соединен с выходом логического элемента ИЛИ-НЕ 20, логический элемент. И 23, входы которого соединены с выходами соответственно первого D-триггера 21 и второго D-триггера 22, а выход подключен к вторым R-входам первого RS-триггера 18 и второго RS-триггера 19 и является восьмым выходом формирователя 13, генератор 24 импульса начальной установки, выход которого связан с третьими R-входами первого 18 и второго 1.9. RS- триггеров, а также со вторыми R-входами первого 21 и второго 22 D-триггеров, первый трехвходовый логический элемент И 25, два прямых входа которого связаны соответственно с выходом первого RS- триггера 18 и первым выходом преобразо- вателя 17 аналог - код, инверсный вход соединен с вторым выходом преобразова-. теля 17 аналог - код, а выход является четвертым выходом формирователя 13 сигналов управления, второй трехвходо- вый логический элемент И 26, прямые выходы которого соответственно связаны С выходом второго RS-триггера 19 и вторым выходом преобразователя.17 аналог-код, инверсный вход элемента И 26 соединен с
третьим выходом преобразователя 17 аналог - код, а выход является пятым выходом формирователя 13 сигналов управления.
Измеритель 15 временных интервалов содержит источник 27 опорного напряжения, вход которого подключен к входам первого интегратора 28 и второго интегратора 29, управляющие входы которых являются входами измерителя 15 временных интервалов.
Задатчики 4, 10, 11, 14 и 27 могут быть выполнены, например, в виде потенциометров.
Вычислитель 16 расчетного тока может быть построен на основе известных функциональных узлов. Согласно функциональной схеме вычислителя (фиг.4, на которой для полноты указаны функциональные аналоги 30 и 31 интеграторов 28 и 29} он содержит первый 30 и второй 31 преобразователи время - напряжение, выходы которых соединены с двумя входами сумматора 32. Выход преобразователя 30 время - напряжение и выход сумматора 32 соединены с аналоговыми входами преобразователя 33 отношения напряжений во времени, причем его логический вход разрешения преобразования связан с восьмым выходом формирователя 13 сигналов управления, а выход - с первым входом логического элемента И 35. второй вход которого связан с выходом генератора 34 импульсов частоты f. Выход логического элемента И 35 связан с первым (частотным) входом умножающего преобразователя 36 числа импульсов в напряжение. Второй (аналоговый) вход преобразователя 36 числа импульсов в напряжение связан с выходом задатчика 10 максимального тока, а третий вход (разрешения преобразования) - с восьмым выходом формирователя .13 сигналов управления.
Устройство работает следующим образом. ..
При включении устройства генератор 24 формирует одиночный импульс, устанавливающий все триггеры формирователя 13 сигналов управления в исходное обнуленное состояние.
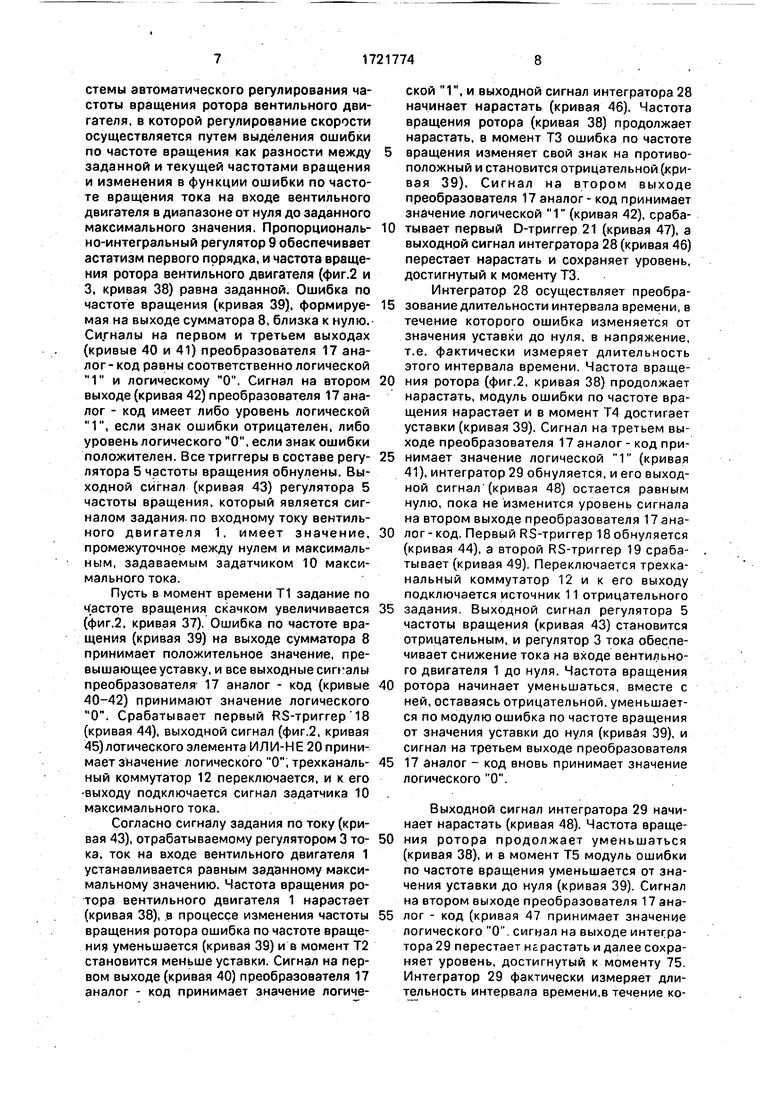
В установившемся режиме задание по частоте вращения ротора (фиг.2 и 3, кривая 37), формируемое задатчиком 4 (фиг.1), неизменно. Сигнал с третьего выхода формирователя 13 сигналов управления отпирает верхний по схеме (фиг.1) ключ коммутатора 12. При этом выход пропорционально-интегрального регулятора 9 подключен через трехвходовый коммутатор 12 к выходу регулятора 5 частоты вращения, и устройство имеет структуру типовой двух контурной системы автоматического регулирования частоты вращения ротора вентильного двигателя, в которой регулирование скорости осуществляется путем выделения ошибки по частоте вращения как разности между заданной и текущей частотами вращения и изменения в функции ошибки по частоте вращения тока на входе вентильного двигателя в диапазоне от нуля до заданного максимального значения. Пропорциональ- но-интегральный регулятор 9 обеспечивает астатизм первого порядка, и частота вращения ротора вентильного двигателя (фиг.2 и 3, кривая 38) равна заданной. Ошибка по частоте вращения (кривая 39), формируе- мая на выходе сумматора 8, близка к нулю. Сигналы на первом и третьем выходах (кривые 40 и 41) преобразователя 17 аналог - код равны соответственно логической 1 и логическому О. Сигнал на втором выходе (кривая 42) преобразователя 17 аналог - код имеет либо уровень логической 1, если знак ошибки отрицателен, либо уровень логического О, если знак ошибки положителен. Все триггеры в составе регу- лятора 5 частоты вращения обнулены. Выходной сигнал (кривая 43) регулятора 5 частоты вращения, который является сигналом задания, по входному току вентильного двигателя 1. имеет значение, промежуточное между нулем и максимальным, задаваемым задатчиком 10 максимального тока.
Пусть в момент времени Т1 задание по частоте вращения скачком увеличивается (фиг.2. кривая 37). Ошибка по частоте вращения (кривая 39) на выходе сумматора 8 принимает положительное значение, превышающее уставку, и все выходные сип-алы преобразователя 17 аналог - код (кривые 40-42) принимают значение логического О. Срабатывает первый RS-триггер 18 (кривая 44), выходной сигнал (фиг.2, кривая 45) лотического элемента ИЛИ-НЕ 20 принимает значение логического трехканаль- ный коммутатор 12 переключается, и к его выходу подключается сигнал задатчика 10 максимального тока.
Согласно сигналу задания по току (кривая 43), отрабатываемому регулятором 3 то- кэ, ток на входе вентильного двигателя 1 устанавливается равным заданному максимальному значению. Частота вращения ротора вентильного двигателя 1 нарастает (кривая 38), .в процессе изменения частоты вращения ротора ошибка по частоте вращения уменьшается (кривая 39) ив момент Т2 становится меньше уставки. Сигнал на первом выходе (кривая 40) преобразователя 17 аналог - код принимает значение логической 1, и выходной сигнал интегратора 28 начинает нарастать (кривая 46). Частота вращения ротора (кривая 38) продолжает нарастать, в момент ТЗ ошибка по частоте вращения изменяет свой знак на противоположный и становится отрицательной (кривая 39). Сигнал на втором выходе преобразователя 17 аналог - код принимает значение логической 1 (кривая 42), срабатывает первый D-триггер 21 (кривая 47), а выходной сигнал интегратора 28 (кривая 46) перестает нарастать и сохраняет уровень, достигнутый к моменту ТЗ.
Интегратор 28 осуществляет преобразование длительности интервала времени, в течение которого ошибка изменяется от значения уставки до нуля, в напряжение, т.е. фактически измеряет длительность этого интервала времени. Частота вращения ротора (фиг.2, кривая 38) продолжает нарастать, модуль ошибки по частоте вращения нарастает и в момент Т4 достигает уставки (кривая 39). Сигнал на третьем выходе преобразователя 17 аналог - код принимает значение логической 1 (кривая 41), интегратор 29 обнуляется, и его выходной сигнал (кривая 48) остается равным нулю, пока не изменится уровень сигнала на втором выходе преобразователя аналог - код. Первый RS-триггер 18 обнуляется (кривая 44), а второй RS-триггер 19 срабатывает (кривая 49). Переключается трехка- нальный коммутатор 12 и к его выходу подключается источник 11 отрицательного задания. Выходной сигнал регулятора 5 частоты вращения (кривая 43) становится отрицательным, и регулятор 3 тока обеспечивает снижение тока на входе вентильного двигателя 1 до нуля. Частота вращения ротора начинает уменьшаться, вместе с ней, оставаясь отрицательной, уменьшается по модулю ошибка по частоте вращения от значения уставки до нуля (кривая 39), и сигнал на третьем выходе преобразователя 17 аналог - код вновь принимает значение логического О.
Выходной сигнал интегратора 29 начинает нарастать (кривая 48). Частота вращения ротора продолжает уменьшаться (кривая 38), и в момент Т5 модуль ошибки по частоте вращения уменьшается от значения уставки до нуля (кривая 39). Сигнал на втором выходе преобразователя 17 аналог - код (кривая 47 принимает значение логического О, сигнал на выходе интегратора 29 перестает нарастать и далее сохраняет уровень, достигнутый к моменту 75. Интегратор 29 фактически измеряет длительность интервала времени.в течение которого модуль ошибки изменяется от значения уставки до нуля.
Сигнал на выходе вычислителя 16 принимает значение, соответствующее расчетному току на входе вентильного двигателя и далее сохраняет это значение. Срабатывает второй D-триггер 22 и обнуляется второй RS-триггер 19. Сигнал на выходе логического элемента ИЛИ-НЕ 20 (кривая 45 принимает значение логической 1, и выходной сигнал пропорционально - интегрального регулятора 9 становится равным сигналу на выходе вычислителя 16. Трехка- нальный коммутатор 12 переключается, и на-его выход поступает сигнал с выхода пропорционально - интегрального регулятора 9. Соответственно входной ток вентильного двигателя становится равным вычисленному току, необходимому для стабилизации частоты вращения на заданном уровне.
Одновременно по формированию уровня логической 1 на выходе логического элемента ИЛИ-НЕ 20, обнуляются первый .21 и второй 22 D-триггер. Система автоматического регулирования частоты вращения ротора вернулась в состояние, когда ее структура, совпадает со структурой подчиненной системы автоматического регулирования. Переходный процесс практически закончен, поскольку начальные условия как по частоте вращения ротора, так и по току на входе вентильного двигателя близки к установившимся значениям.
Действительно, приближенно уравнение движения ротора вентильного двигателя может быть представлено в виде:
. dQ v . ...
J -jr- K-ld-MH,
где J - момент инерции ротора;
Q- частота вращения;
Id - ток на входе вентильного двигателя;
Мн - момент нагрузки.
К - коэффициент пропорциональности.
При частотном пуске мощных синхронных машин от преобразователя частоты относительно малой мощности можно полагать, что коэффициент пропорциональности К не зависит от значения тока Id, a момент нагрузки при малых отклонениях частоты вращения ротора от заданной не зависит от самой частоты вращения.
Рассмотрим интервалы времени между моментами Т2, ТЗ и моментами Т4, ТГ5 (фиг.2). На первом интервале ток fd равен максимальному значению амакс, а частота вращения изменяется от Q3- Аймаке до Q3, где Q3-заданная частота вращения,а Аймаке- отклонение по частоте вращения.
соответствующее сигналу задатчика 14 уставки. Обозначим длительность первого интервала как п, подставив в (1) значение IcHdMaicc и, интегрируя (1) на первом интер- вале, получим
J-AQwaKc Л (К- ldMa.cc - Мн ).(2)
На втором интервале ток Id равен нулю, а частота вращения изменяется от Q- + + A Q макс до QS. Обозначим длительность второго интервала времени как тг, подставим в (1) значение Id 0 и, интегрируя (1) на вторим интервале, получим
-J ДЈ2макс Г2-Мн .(3)
Разрешим (2) и (3) относительно значе- ния Мн:
Мн - К IdMaKC
Г1
1 + Т2
(4)
Следовательно, для стабилизации частоты вращения на заданном уровне при дан- ном значении момента нагрузки требуется ток Idycr на входе вентильного двигателя, равный
IdycT - IdMaKC
T
Т +Г2
(5)
Вычислитель 16 расчетного тока формирует в момент времени Т5 начальные условия для пропорционально-интегрального
регулятора 9 в соответствии с (5). чем и обеспечивается практически установившийся режим.
Достаточная точность в вычислении тока, соответствующего установившемуся режиму, достигается, когда за время изменения тока от нуля до максимального значения и обратно частота вращения практически не изменяется. При частотном пуске газотурбинных установок это условие
выполняется. Далее осуществляют регулирование тока обычным образом, т.е. в функции ошибки по частоте вращения.
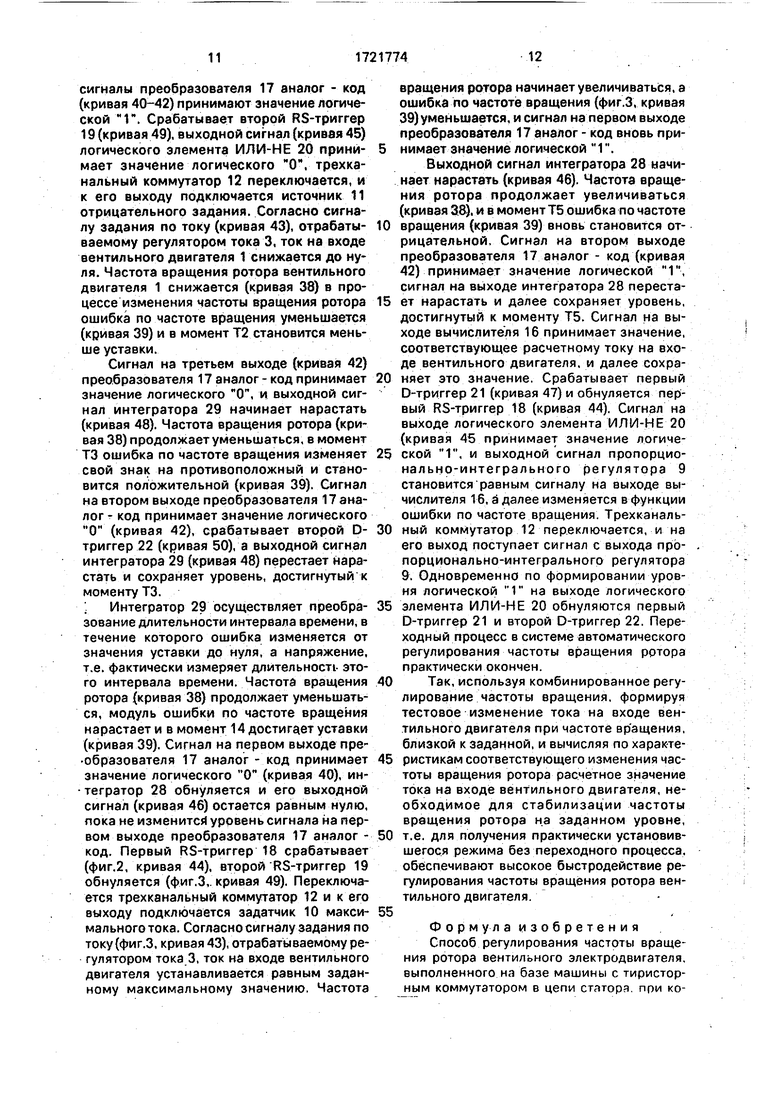
На фиг.З представлены временные диаграммы отработки устройством уменьшения задания по частоте вращения ротора. Исходное состояние устройства соответствует установившемуся режиму и описано.
Пусть в момент времени Т1 задание по частоте вращения скачков уменьшается
(фиг.З, кривая 37). Ошибка по частоте вращения (кривая 39 на выходе сумматора 8 принимает отрицательное значение, по модулю превышающее уставку, заданную за- датчиком 14 уставки, и все выходные
сигналы преобразователя 17 аналог - код (кривая 40-42) принимают значение логической 1. Срабатывает второй RS-триггер 19 (кривая 49), выходной сигнал (кривея 45) логического элемента ИЛИ-НЕ 20 принимает значение логического О, трехка- нальный коммутатор 12 переключается, и к его выходу подключается источник 11 отрицательного задания. Согласно сигналу задания по току (кривая 43), отрабатываемому регулятором тока 3, ток на входе вентильного двигателя 1 снижается до нуля. Частота вращения ротора вентильного двигателя 1 снижается (кривая 38) в процессе изменения частоты вращения ротора ошибка по частоте вращения уменьшается (кривая 39) и в момент Т2 становится меньше уставки.
Сигнал на третьем выходе (кривая 42) преобразователя 17 аналог - код принимает значение логического О, и выходной сигнал интегратора 29 начинает нарастать (кривая 48). Частота вращения ротора (кривая 38) продолжает уменьшаться, в момент ТЗ ошибка по частоте вращения изменяет свой знак на противоположный и становится положительной (кривая 39). Сигнал на втором выходе преобразователя 17 аналог - код принимает значение логического О (кривая 42), срабатывает второй D- триггер 22 (кривая 50), а выходной сигнал интегратора 29 (кривая 48) перестает нарастать и сохраняет уровень, достигнутый к моменту ТЗ.
; Интегратор 29 осуществляет преобразование длительности интервала времени, в течение которого ошибка изменяется от значения уставки до нуля, а напряжение, т.е. фактически измеряет длительность этого интервала времени. Частота вращения ротора (кривая 38) продолжает уменьшаться, модуль ошибки по частоте вращения нарастает и в момент 14 достигает уставки (кривая 39). Сигнал на первом выходе пре- образователя 17 аналог - код принимает значение логического О (кривая 40), ин- тегратор 28 обнуляется и его выходной сигнал (кривая 46) остается равным нулю, пока не изменится уровень сигнала на первом выходе преобразователя 17 аналог - код. Первый RS-триггер 18 срабатывает (фиг.2, кривая 44), второй RS-триггер 19 обнуляется (фиг.З, кривая 49). Переключается трехканальный коммутатор 12 и к его выходу подключается задатчик 10 максимального тока. Согласно сигналу задания по току (фиг.З, кривая 43), отрабатываемому регулятором тока 3, ток на входе вентильного двигателя устанавливается равным заданному максимальному значению. Частота
вращения ротора начинает увеличиваться, а ошибка по частоте вращения (фиг.З, кривая 39)уменьшается, и сигнал на первом выходе преобразователя 17 аналог - код вновь принимает значение логической 1.
Выходной сигнал интегратора 28 начинает нарастать (кривая 46). Частота вращения ротора продолжает увеличиваться (кривая 38). и в момент Т5 ошибка по частоте
0 вращения (кривая 39) вновь становится отрицательной. Сигнал на втором выходе преобразователя 17 аналог - код (кривая 42) принимает значение логической 1, сигнал на выходе интегратора 28 переста5 ет нарастать и далее сохраняет уровень, достигнутый к моменту Т5. Сигнал на выходе вычислителя 16 принимает значение, соответствующее расчетному току на входе вентильного двигателя, и далее сохра0 няет это значение. Срабатывает первый D-триггер 21 (кривая 47) и обнуляется первый RS-триггер 18 (кривая 44). Сигнал на выходе логического элемента ИЛИ-НЕ 20 (кривая 45 принимает значение логиче5 ской 1, и выходной сигнал пропорционально-интегрального регулятора 9 становится равным сигналу на выходе вычислителя 16, а далее изменяется в функции ошибки по частоте вращения. Трехканаль0 ный коммутатор 12 переключается, и на его выход поступает сигнал с выхода пропорционально-интегрального регулятора 9. Одновременно по формировании уровня логической 1 на выходе логического
5 элемента ИЛИ-НЕ 20 обнуляются первый D-триггер 21 и второй D-триггер 22. Переходный процесс в системе автоматического регулирования частоты вращения ротора практически окончен.
0 Так, используя комбинированное регулирование частоты вращения, формируя тестовое изменение тока на входе вентильного двигателя при частоте вращения, близкой к заданной, и вычисляя по характе5 ристикам соответствующего изменения частоты вращения ротора расчетное значение тока на входе вентильного двигателя, необходимое для стабилизации частоты вращения ротора на заданном уровне,
0 т.е. для получения практически установившегося режима без переходного процесса, обеспечивают высокое быстродействие регулирования частоты вращения ротора вентильного двигателя.
5
Форм у-л а изобретения Способ регулирования частоты вращения ротора вентильного электродвигателя, выполненного на базе машины с тиристор- ным коммутатором в цепи статора, при котором выделяют ошибку по частоте вращения как разность между заданной и текущей частотами вращения и изменяют в функции ошибки по частоте вращения ток на входе вентильного двигателя в диапазоне от нуля до заданного максимального значения, отличающийся тем, что, с целью повышения быстродействия,-задают уставку, сравнивают ошибку с заданной уставкой, определяют знак ошибки, и если модуль ошибки превышает уставку, то устанавливают ток на входе вентильного электродвигателя равным либо заданному максимальному значению, либо нулю, так, чтобы в процессе последующего изменения частоты вращения ротора вентильного электродвигателя ошибка изменила свой знак
на противоположный, а модуль ошибки поочередно принял значения, равные заданной уставке, нулю, вновь заданной уставке и вновь нулю, измеряют длительности двух
интервалов времени, в течение каждого из которых модуль ошибки уменьшается от значения уставки до нуля, определяют по заданному максимальному значению тока и по измеренным длительностям интервалов времени расчетное значение тока на входе вентильного двигателя, необходимое для стабилизации частоты вращения ротора вентильного двигателя на заданном уровне, и осуществляют указанное изменение тока на входе вентильного двигателя, задав начальный ток, равным расчетному значению тока.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
| Асинхронный вентильный каскад | 1986 |
|
SU1422359A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Устройство для раздельного управления группами вентилей преобразователя | 1983 |
|
SU1125726A1 |
| Вентильный электропривод постоянного тока | 1989 |
|
SU1676055A1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМ МОМЕНТОМ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457610C2 |
| Устройство раздельного управления вентильными группами преобразователя частоты для асинхронного электропривода | 1988 |
|
SU1545305A1 |

Изобретение относится к электротехнике и может быть использовано в газотурбин- ных установках. Целью изобретения является повышение быстродействия. Для этого в способе регулирования частоты вращения ротора вентильного электродвигателя сравнивают ошибку частоты вращения с заданной уставкой. Если модель ошибки превышает уставку, то устанавливают ток на входе- вентильного двигателя, равным максимальной величине или нулю с тем, чтобы в процессе последующего изменения частоты вращения ошибка изменяла свой знак на противоположный, а модуль ошибки поочередно принимала значения, равные заданной уставке, нулю, вновь заданной уставке и вновь нулю. Измеряют .длительностиГ двух интервалов времени, в течение каждого из которых модель ошибки уменьшается от значения уставки до нуля. Определяют значение тока на входе вентильного двигателя, необходимое для стабилизации частоты вращения, которую осуществляют изменением тока на входе движителя, установив его значение, равное расчетному. 4 ил.. Ч| Ь 3 2
Фив. 2
Фиг.3
-&
Фиг4
| Колоколкин A.M | |||
| Разработка системы управления и регулирования тиристорных преобразователей для пуска мощных синхронных машин | |||
| / Автореферат дисс | |||
| на со- иск | |||
| учен, степени канд | |||
| техн | |||
| наук | |||
| -М., 1985, с.8, рис.1, 2 | |||
| Абрамович Р.Д., Бояршинова А.Е., Сытин А.П | |||
| Система управления и регулирования тиристорного пускового устройства | |||
| /В .сб | |||
| Исследования, разработка, испытания и опыт эксплуатации высоковольтных тиристорных преобразователей для энергетики | |||
| - Л.: Энергоатомиздат, 1986, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
