СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ Известны способы управления вентильными преобразователями, состоящими из двух последовательно включенных на общую нагрззку управляемых выпрямителей, один из которых выполнен по схеме с естественной коммутацией, а другой с искусственной, путем регулирования углов зажигания в функции задающего сигнала. Эти способы не обеспечивают поддержания в широком диапазоне выпрямленного тока и напряжения. Описываемое изобретение решает эту задачу путем регулирования реактивной мощности вентильного преобразователя и поддержания ее на заданном уровне. На фиг. 1 показана блок-схема вентильного преобразователя с регулированием по величине отклонения реактивной мощности; на фиг. 2 - блок-схема вентильного преобразователя с регулированием реактивной мощности по возмущению (по току нагрузки). Для того чтобы величина потребляемой реактивной мощности оставалась постоянной, углы зажигания вентилей обоих нреобразователей 0,1 и ссз должны изменяться при регулировании выпрямленного напряжения Ud таКИМ образом, чтобы одновременно выполнялись соотношения 2 -углы сдвига первой гармоническойпотребляемогокаждым преобразователем тока, определяемые соотношением(i±ll,(3) 2 - выпрямленные э.д.с. холостого хода преобразователей при отсутствии регулирования, Y - угол коммутации вентилей, d - выпрямленный ток преобразователей. шение (1) и (2) дает следуюуглов ф1 и фз: о, z arciffQ- + fl(ul + 2i/rfo 4 / Q -r Ul ll cp2 arc tgВ случае, когда вольт-амперная характеристика нагрузки известна и определённа (т. е. когда выпрямленное напрял ;ение и ток связаны известным однозначным соотношением), значения углов зажигания вентилей могут быть вычислены нри помощи уравнений (3), (4), (5) и реализованы при регулировании выпрямленного напряжения.
Если же ток нагрузки может изменяться независимо от величины напряжения, как например в большинстве электроприводов, для обеспечения постоянства реактивной мош;ности можно применить замкнутую систему автоматического управления, воздействующую соответствующим образом на углы зажигания вентилей обоих преобразователей.
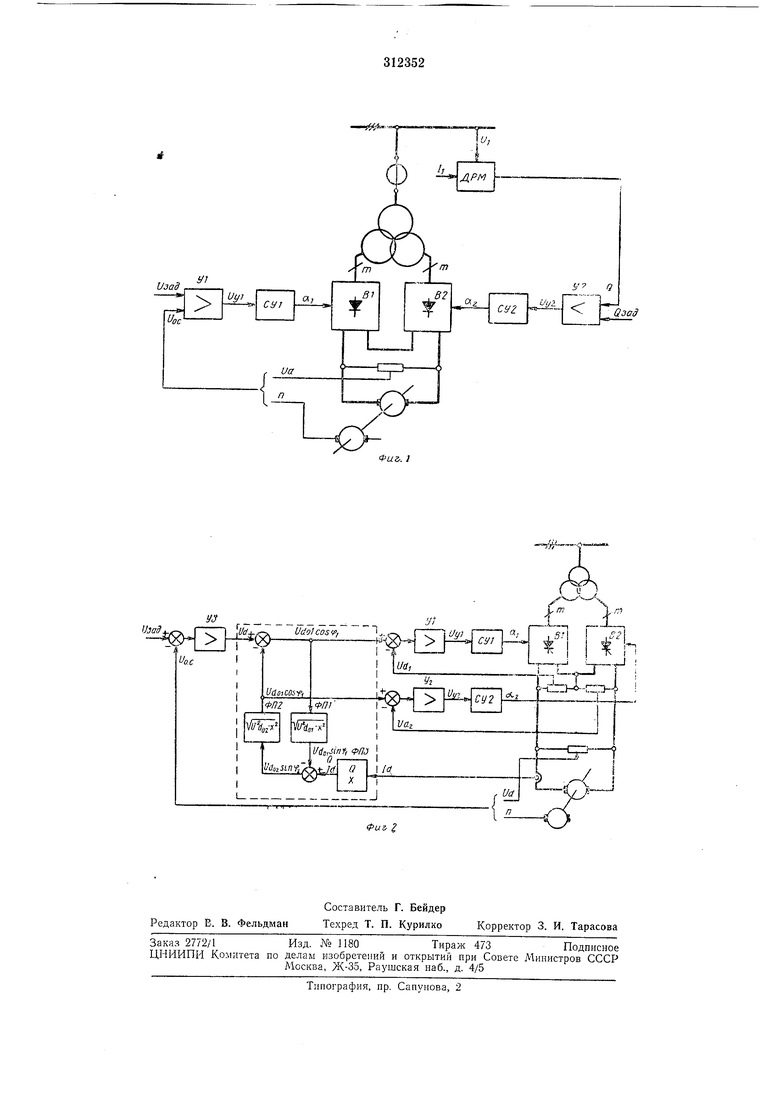
Рассмотрим блок-схему (см. фиг. 1). На вход системы управления СУ 1 углами зажигания вентилей ai преобразователя В1, выполненного по схеме с естественной коммутацией вентилей, подается сигнал управления t/yi с выхода усилителя У1, на вход которого подается задающий сигнал Ьзад и сигнал обратной связи Ио.с по основному регулируемому параметру.
На фиг. 1 в качестве такого параметра условно показано выпрямленное напряжение t/j или скорость приводного двигателя п, являющегося нагрузкой преобразовательной установки; в общем случае это могут быть и другие физические величины, как например ток двигателя или угол поворота механизма. Эта система автоматического регулирования обеспечивает требуемый уровень выпрямленного напряжения преобразовательной установки независимо от величины выпрямленного напряжения преобразователя с искусственной коммутацией вентилей В2, обеспечивая тем самым выполнение соотнощения (1). Одновременное выполнение соотношения (2), необходимое для постоянства реактивной мощности, обеспечивается работой второй системы автоматического регулирования, воздействующей на углы зал игания вентилей а преобразователя с искусственной коммутацией вентилей. С этой целью на вход системы управления СУ2 углами зажигания вентилей преобразователя В2 подается сигнал управления с выхода усилителя У2, на входе которого сравниваются фактическое Q и заданное Сзад значения реахтивной мощности. Фактическая величина реактивной мощности преобразовательной установки определяется датчиком реактивной мощности ДРМ по величине и фазе первичного напряжения Ui и тока / преобразовательного трансформатора.
При регулировании выпрямленного напряжения эти системы автоматического регулирования обеспечивают одновременное изменение углов регулирования oci и a.z, необходимое для поддержания постоянства реактивной мощности. Так, например, при изменении задающего сигнала в сторону снижения величины выпрямленного напрял ения будет увеличиваться угол «ь снижая напряжение преобразователя Ы; одновременно вследствие увеличения реактивной мощности Q будет увеличиваться угол 0.2, восстанавливая величину Q и уменьшая напряжение преобразователя 82.
Такое изменение углов будет продолжаться до тех пор, пока результирующее напряжение обратной связи t/o.c не достигнет требуемого уровня. Аналогично протекает работа схемы при изменении нагрузки преобразователя. Так, например, увеличение реактивной мощности Q. вследствие повышения выпрямленного тока приведет к увеличению угла «г и снижению напряжения преобразователя В2.
Вследствие изменения выпрямленного напряжения будет изменяться угол а,, повышая напряжение преобразователя В1 и способствуя снилсению Q. В результате этих изменений будут восстановлены требуемые значения UQ.C и Q при изменившейся величине тока нагрузки.
Таким образом, значения углов «i и осг автоматически изменяются, обеспечивая выполнение системы уравнений (4), (5).
Блок-схема, указанная на фиг. 2, предусматривает регулирование реактивной мощности не по отклонению регулируемой величины (реактивной мощности), а по возмущению (по величине тока нагрузки), путем непосредственного решения систем уравнений (1) и (2) на аналоговом устройстве. Этим обеспечивается инвариантность системы регулирования, отпадает необходимость измерения фактического значения реактивной мощности, устраняются трудности в настройке двух совместно работающих нелинейных систем автоматического регулирования.
Номимо элементов системы управления каждым из преобразователей У1, У2, СУ1, СУ2 схема содержит входной усилитель УЗ и аналоговое вычислительное устройство (обведенное на фиг. 2 нунктиром), состоящее из трех функциональных преобразователей ФП1, ФП2 и ФПЗ.
На фнг. 2 показаны математические операции, выполняемые функциональными преобразователями, где величиной К обозначен сигнал, подаваемый на вход функционального преобразователя.
На вход усилителя УЗ подается разность задающего сигнала /зад и сигнала обратной связи по регулируемому параметру fyo.c.
Так же, как и на фиг. 1, в качестве сигнала обратной связи условно показано напрялсение или скорость двигателя, являющегося нагрузкой преобразовательной установки. Выходное напряжение усилителя УЗ пропорционально выпрямленному напряжению установки Ud и является основным регулирующим сигналом в схеме управления. Это напряжение разделяется с помощью аналогового устройства на два сигнала и У о2созф2, пропорциональные вынрямленным напряжениям каждого из преобразователей, которые, сравниваясь с истинными значениями выпрямленных напряжений Udi и Udz, поступают в схемы управления каждого из преобразователей и обеспечивают соответствующее изменение углов зажигания вентилями. Работа аналогового устройства происходит в соответствии с уравнениями (1) и (2) и заключлгтся в следующем. Задаюсцки сигнал для выпрямленного напряжения первого преобразователя В1 (с естественной коммутацией вентилей) получается как разность задающего сигнала напряжения преобразовательной установки Ud и задающего сигнала для напряжения второго преобразователя (с искусственной коммутацией вентилей) Ойо2созф2. (/(iOlCOSepi t/ti - f/d02COSCp2. Затем сигнал t/doicoscfi поступает на вход функционального преобразователя ФП1, преобразующего его в величину, пропорциональную относительному значению реактивной мощности, потребляемой первым преобразователем, на основе синусно-косинусной зависимости: и,,. Sin , У UI,, - (U,,, COS. J (7) Полученный сигнал вычитается из относительного значения результирующей реактивной мощности для получения относительной величины реактивной мощности, компенсируемой вторым преобразователем: -|г- - и,., sin р. и,,, sin с,. (8) Та Та. В свою очередь, сигнал, пропорциональный относительному значению результирующей реактивной мощности, определяется при помощи функционального преобразователя ФПЗ, воспроизводящего гиперболическую зависимость, как величина обратно пропорциональная фактическому значению выпрямленного тока Id, причем коэффициент пропорциональности характеризует в некотором масщтабе абсолютное значение поддерживаемой реактивной мощности. Сигнал относительной реактивной мощности второго преобразователя, поступая на вход функционального преобразователя ФП2, аналогичного по воспроизводимой математической зависимости ФП1, преобразуется в сигнал, пропорциональный выпрямленному напряжению второго преобразователя: de cos ср, - (d.2 sin 2)Последний и подается для вычитания из задающего сигнала для результирующего выпрямленного напряжения, замыкая тем самым 5 10 15 2э 25 30 35 40 45 50 55 схему аналогового вычислительного устройства. Таким образом, аналоговое вычислительное устройство перераспределяет основное регулирующее воздействие по двум ка 1алам в зависимости от величины выпрямленного напряжения тока, не изменяя в то же время его величины. Благодаря этому, несмотря на наличие Б схеме трех блоков нелинейности, система управления остается линейной. Наличие индивидуальных схем управления каждым преобразователем, на входе которых сравниваются задающие и фактические величины выпрямленного напряжения, обеспечивает регулирование углов залшгания вентилей в соответствии с уравнением (3), т. е. с учетом влияния угла коммутации вентилей на величину реактивной мощности и выпрямленного напряжения. Применяемые в схеме функциональные преобразователи могут быть построены по люоому принцину, ооеспечивающему требуемые соотнощеиия напрял.ений вход-выход, которые, в свою очередь, могут быть с целью повыщения точности регулирования скорректированы для воспроизведения более сложных (по сравнению с описанными) математических зависи.мостей, точнее отражающих электромагнитные процессы в вентильных преобразовате ях. Предмет изобретения Способ управления вентильным преобразователем, состоящим из двух последовательно включенных на общую нагрузку управляемых выпрямителей, один из которых выполнен по схеме с естественной коммутацией вентилей, а другой с искусственной, путем регулирования углов зажигания в функции задающего сигнала, отличающийся тем, что, с целью поддержания постоянства реактивной мощности, задающий сигнал распределяют мелсду системами, управления каждого выпрямителя в функции относительного значения результирующей реактивной мощности таким образом, что сигнал управления, подаваемый в систему управления выпрямителя с естественной коммутацией, получают как разность между сигналом, представляющим функцию указанного задающего сигнала, и задающим сигналом выпрямителя с искусственной коммутацией, для формирования которого полученную разность преобразуют в величину, пропорциональную относительному значению реактивной мощности, потребляемой выпрямителем с естественной коммутацией, и вычитают ее из относительного значения результирующей реактивной мощности. - 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВКЛЮЧЕНИЯ ДВУХМОСТОВОГО ПРЕОБРАЗОВАТЕЛЯ, РАБОТАЮЩЕГО В РЕЖИМЕ ПЛАВКИ ГОЛОЛЕДА | 2006 |
|
RU2309522C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ НА СЕТЕВОМ ВХОДЕ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 1999 |
|
RU2167484C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ НА СЕТЕВОМ ВХОДЕ ОДНОФАЗНОГО ВЕНТИЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 1999 |
|
RU2159985C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ВЫПРЯМИТЕЛЬНЫМ АГРЕГАТОМ | 2007 |
|
RU2333589C1 |
| ПОЛНОСТЬЮ КОМПЕНСИРОВАННЫЙ ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1996 |
|
RU2117377C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСЛЕДОВАТЕЛЬНО ВКЛЮЧЕННЫМИ ПРЕОБРАЗОВАТЕЛЯМИ | 1971 |
|
SU294218A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Устройство для компенсации реактивной мощности многомостового вентильного преобразователя | 1982 |
|
SU1069065A1 |
| Способ управления выпрямительно-инверторной подстанцией и устройство для его осуществления | 1976 |
|
SU873372A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ВЫПРЯМИТЕЛЬНЫМ АГРЕГАТОМ | 2014 |
|
RU2563027C1 |
УЗ
/.i.
