с со со
00
со
14)
10
11379933
Изобретение относится к электротехнике, может быть использовано в системах стабилизации скорости вращения и момента рабочих органов, например в оборудовании по переработке пластмасс, а системах косвенного по крутящему моменту регулирования натяжения материала (полимерных пленок, труб и др.) при намотке в рулоны, бухты, на бобины, в судовых следящих лебедках для стабилизации усилий в канатах, в других объектах техники, требующих регулирования момента или скорости электропривода и является усовершенствованием изобретения по авт. св. К 1272Д63.
Цель изобретения - улучшение динамических показателей электропривода путем повышения быстродействия при регулировании момента и увеличение перегрузочной способности.
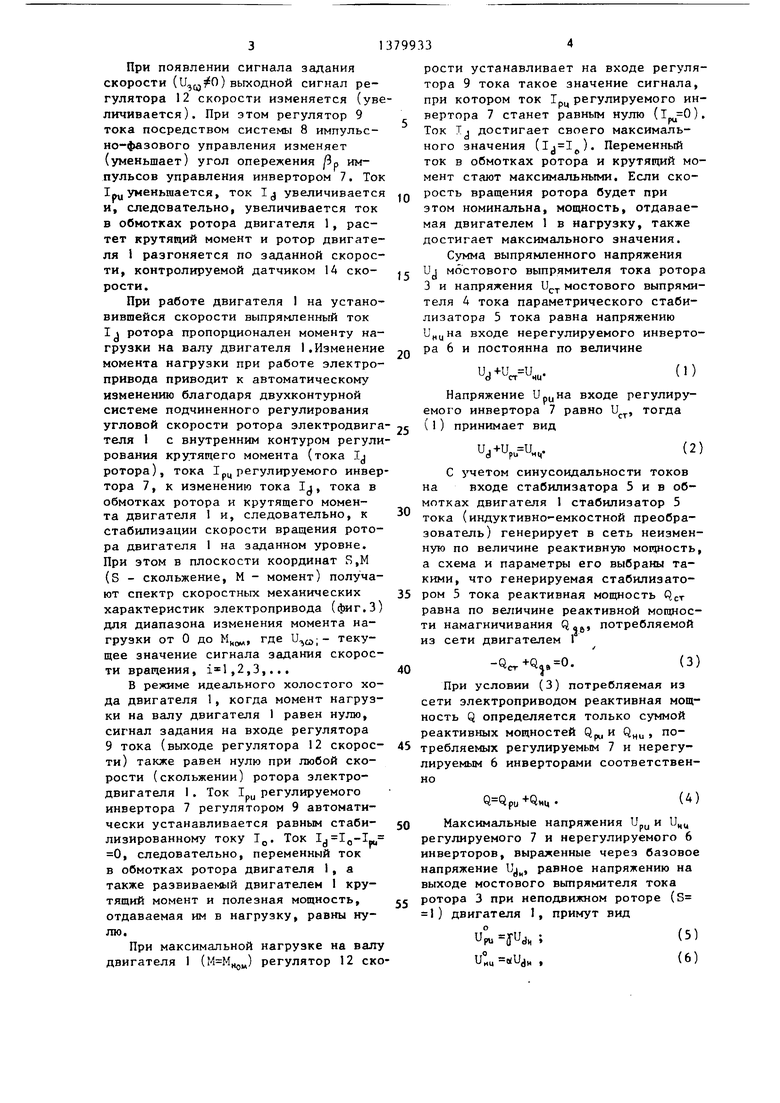
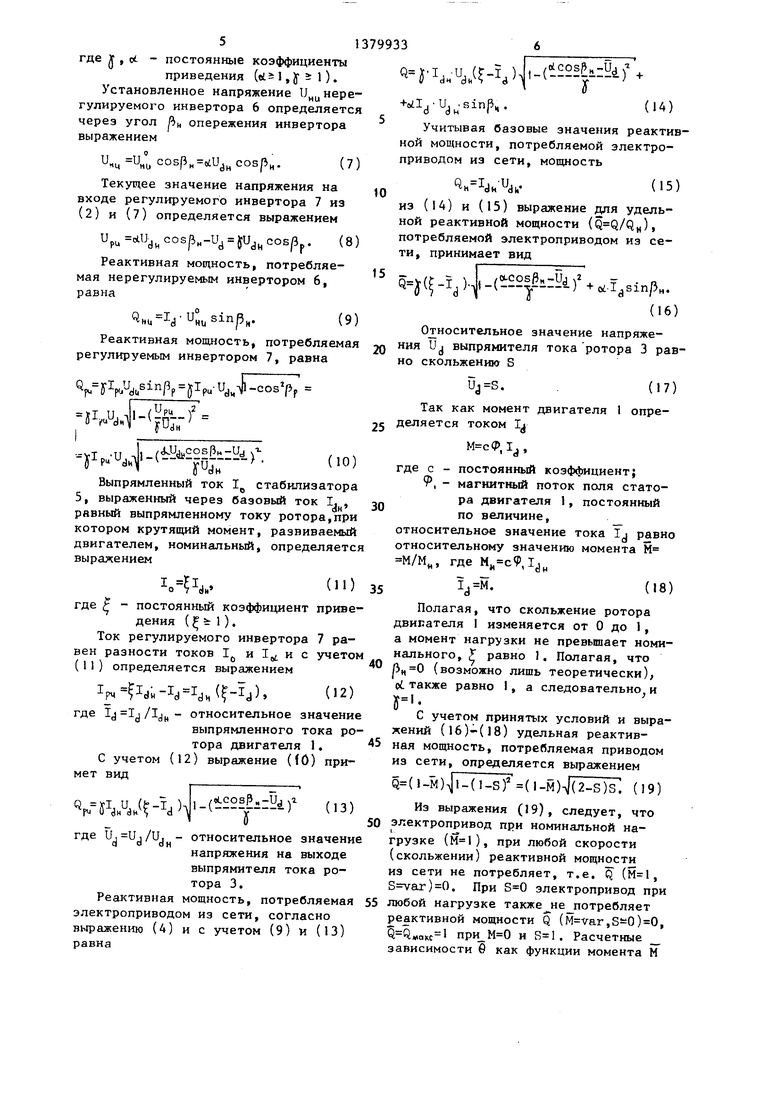
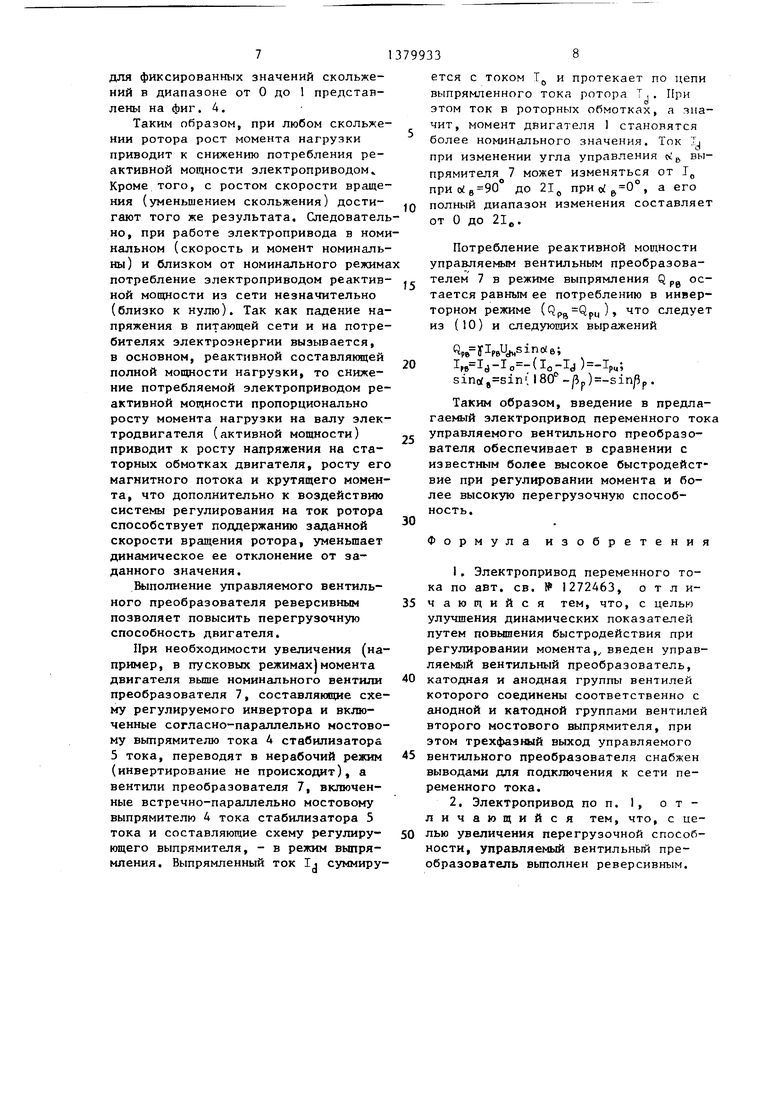
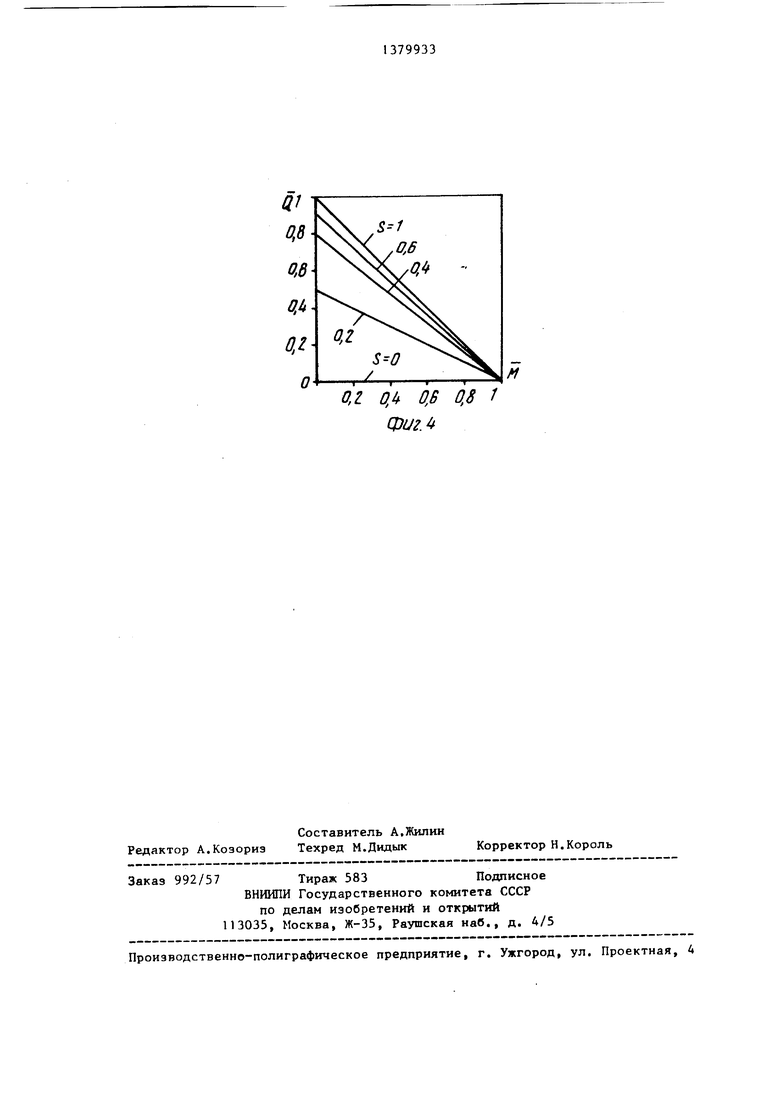
На фиг. 1 представлена функциональная схема электропривода переменного тока; на фиг. 2 - замкнутая дпухконтурная система подчиненного регулирования угловой скорости ротора с внутренним контуром регулирования крутящего момента; на фиг.З - механические характеристики электропривода; на фиг. 4 - график расчетных зависимостей потребления электроприводом реактивной мощности Б функции момента.
Электропривод переменного тока
разователь 7, катодная группа вентилей которого соединена с анодной группой вентилей второго мостового выпрямителя 4. Анодная группа вентилей управляемого вентильного пре образователя 7 соединена с катодно группой вентилей второго мостового выпрямителя 4, трехфазный выход уп ляемого вентильного преобразовател 7 предназначен для подключения к с ти 2 переменного тока.
В замкнутой по скорости системе (фиг. 2) электропривод переменного
5 тока содержит систему 8 импульсно- фазового управления, подключенную выходом к управляющему входу управ ляемого вентильного преобразовател 7, а входом - к выходу регулятора тока. Вход регулятора 9 тока подсо динен к выходу сумматора 10 токов, инвертирующий вход которого соединен с выходом датчика I1 вьтрямлен ного тока ротора, а неинвертирую- щий - с выходом регулятора 12 скорости вращения. Датчик 11 тока сво входом по выпрямленному току подсо динен между катодной группой венти лей первого мостового выпрямителя
,Q и катодной группой вентилей управл емого вентильного преобразователя а регулятор I2 скорости вращения с им входом присоединен к выходу сум матора 13 скоростей, неинвертирующий вход которого предназначен для
20
25
(фиг. 1) содержит асинхронный двига- 35 задания скорости, а инвертирующий
разователь 7, катодная группа вентилей которого соединена с анодной группой вентилей второго мостового выпрямителя 4. Анодная группа вентилей управляемого вентильного преобразователя 7 соединена с катодной группой вентилей второго мостового выпрямителя 4, трехфазный выход управляемого вентильного преобразователя 7 предназначен для подключения к сети 2 переменного тока.
В замкнутой по скорости системе (фиг. 2) электропривод переменного
5 тока содержит систему 8 импульсно- фазового управления, подключенную выходом к управляющему входу управляемого вентильного преобразователя 7, а входом - к выходу регулятора 9 тока. Вход регулятора 9 тока подсоединен к выходу сумматора 10 токов, инвертирующий вход которого соединен с выходом датчика I1 вьтрямлен- ного тока ротора, а неинвертирую- , щий - с выходом регулятора 12 скорости вращения. Датчик 11 тока своим входом по выпрямленному току подсоединен между катодной группой вентилей первого мостового выпрямителя 3
Q и катодной группой вентилей управляемого вентильного преобразователя 7, а регулятор I2 скорости вращения своим входом присоединен к выходу сумматора 13 скоростей, неинвертирующий вход которого предназначен для
0
5
5 задания скорости, а инвертирующий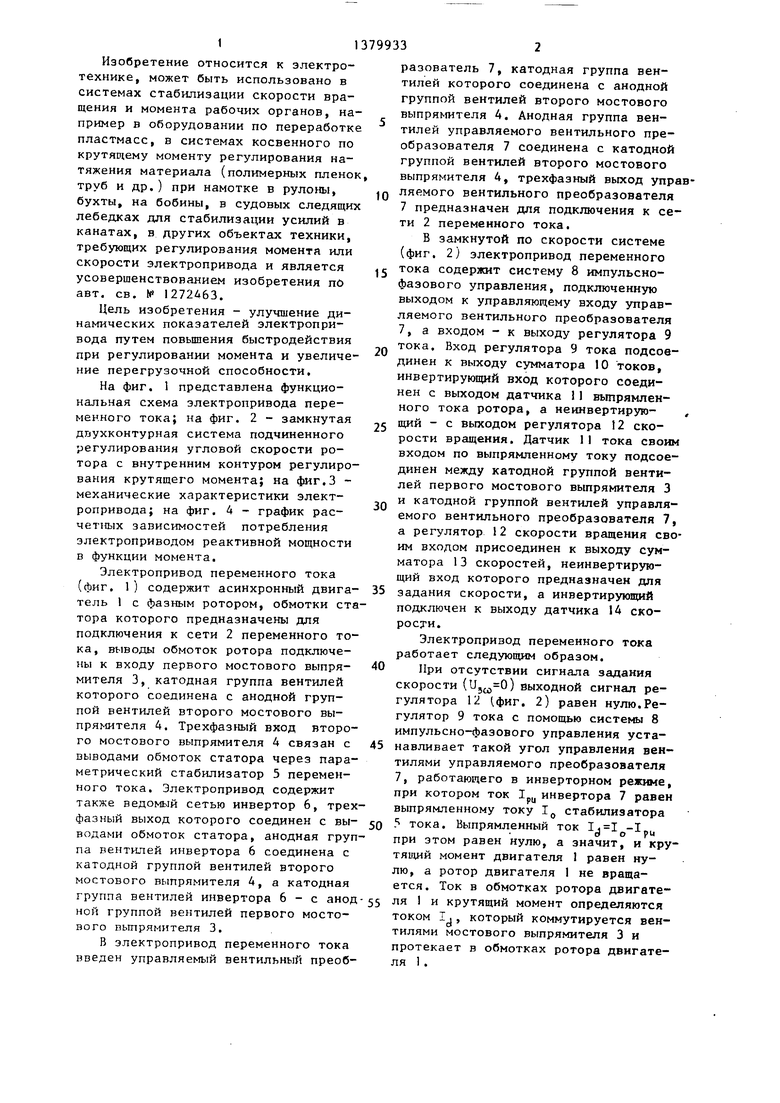
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Электропривод переменного тока | 1990 |
|
SU1725360A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| Электропривод переменного тока | 1983 |
|
SU1100705A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| Способ управления электроприводом переменного тока | 2019 |
|
RU2724982C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
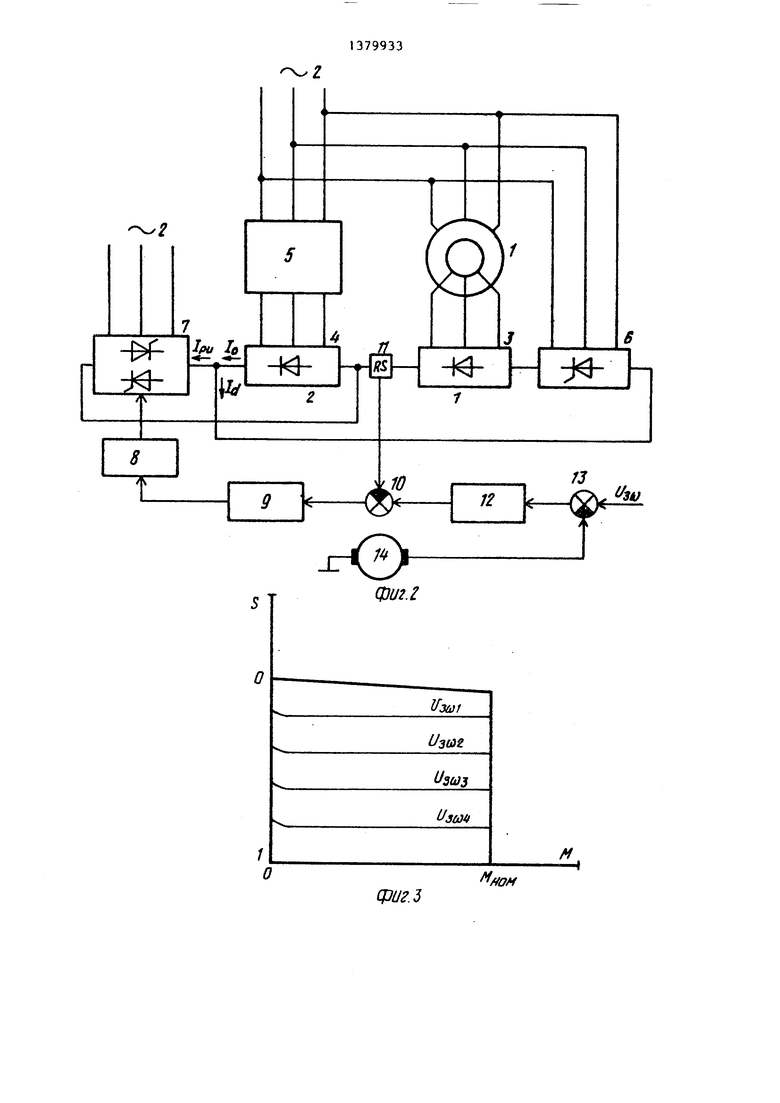
Изобретение относится к электротехнике и может быть использовано в оборудовании по переработке пластмасс, по намотке в рулоны, бухты, на бобины, в судовых следящих лебедках. Целью изобретения является улучшение динамических показателей электропровода путем повьшения быстродействия при регулироваггии момента. Указанная цель достигается тем, что в электропривод переменного тока введен управляемый вентильный преобразователь (УПВ) 7.Катодная и анодная группы вентилей УПВ 7 соединены соответственно с анодной и катодной группами мостового выпрямителя 4. Выходы УПВ подключены к сети переменного тока. В результате обеспечивается снижение потребле)1ия реактивной мощности пропорционально росту момента нагрузки на валу двигателя 1. Это приводит к росту напряжения }ia статорных обмотках двигателя 1 , росту его магнитного потока и крутя- Diero момента, что способствует стабилизации частоты вращения, уменьшает динамическое ее отклонение от заданного значения. 1 з.п. ф-лы, 4 ил. (Л
тель I с фазным ротором, обмотки статора которого предназначены для подключения к сети 2 переменного тока, выводы обмоток ротора подключе
ны к входу первого мостового выпрямителя 3, катодная группа вентилей которого соединена с анодной группой вентилей второго мостового выпрямителя 4. Трехфазный вход второго мостового выпрямителя 4 связан с выводами обмоток статора через параметрический стабилизатор 5 переменного тока. Электропривод содерткит также ведомый сетью инвертор 6, трехфазный выход которого соединен с вы- водами обмоток статора, анодная группа вентилей инвертора 6 соединена с катодной группой вентилей второго мостового выпрямителя 4, а катодная группа вентилей инвертора 6 - с анод ной группой вентилей первого мостового вьтрямителя 3.
В электропривод переменного тока введен управляемый вентильный преоб0
5
0 5
подключен к выходу датчика 14 ско- росуи.
Электропривод переменного тока работает следующим образом.
При отсутствии сигнала задания скорости () выходной сигнал регулятора 12 1ФИГ. 2) равен нулю.Регулятор 9 тока с помощью системы 8 импульсно-фазового управления устанавливает такой угол управления вентилями управляемого преобразователя 7, работающего в инверторном режиме, при котором ток 1рц инвертора 7 равеи выпрямленному току 1 стабилизатора 5 тока. Выпрямленный ток -1рц при этом равен нулю, а значит, и кру- тяиучй момент двигателя 1 равен нулю, а ротор двигателя 1 не вращается. Ток в обмотках ротора двигателя 1 и крутящий момент определяются током Ij, который коммутируется вентилями мостового выпрямителя 3 и протекает в обмотках ротора двигателя 1 .
При появлении сигнала задания скорости (Цщ ) выходной сигнал регулятора 12 скорости изменяется (увеличивается). При этом регулятор 9 тока посредством системы 8 импульс- ио-фазового управления изменяет (уменьшает) угол опережения /Зр импульсов управления инвертором 7. Ток 1ру уменьшается, ток Ij увеличивается и, следовательно, увеличивается ток в обмотках ротора двигателя 1, растет крутящий момент и ротор двигателя I разгоняется по заданной скорости, контролируемой датчиком 14 ско- рости.
При работе двигателя 1 на установившейся скорости выпрямленный ток Ij ротора пропорционален моменту нагрузки на валу двигателя I.Изменение момента нагрузки при работе электропривода приводит к автоматическому изменению благодаря двухконтурной системе подчиненного регулирования угловой скорости ротора электродвига теля 1 с внутренним контуром регулирования крутящего момента (тока Ij ротора), тока I„ц регулируемого инвертора 7, к изменению тока Ij, тока в обмотках ротора и крутящего момента двигателя 1 и, следовательно, к стабилизации скорости вращения ротора двигателя 1 на заданном уровне. При этом в плоскости координат S,M (Б - скольжение, М - момент) получают спектр скоростных механических характеристик электропривода (г.З) для диапазона изменения момента нагрузки от о до Мцц„, где и,сд;- текущее значение сигнала задания скорости вращения, ,2,3,...
В режиме идеального холостого хода двигателя 1, когда момент нагрузки на валу двигателя 1 равен нулю, сигнал задания на входе регулятора 9 тока (выходе регулятора 12 скорое- ти) также равен нулю при любой скорости (скольжении) ротора электродвигателя 1 . Ток I регулируемого инвертора 7 регулятором 9 автоматически устанавливается равным стаби- лизированному току Т. Ток ,-1 0, следовательно, переменный ток в обмотках ротора двигателя 1, а также развиваемый двигателем 1 крутящий момент и полезная мощность, отдаваемая им в нагрузку, равны нулю.
При максимальной нагрузке на валу двигателя 1 (,) регулятор 12 ско
рости устанавливает на входе регулятора 9 тока такое значение сигнала, при котором ток I регулируемого инвертора 7 станет равным нулю (1.0). Ток Ij достигает своего максимального значения (, Переменный ток в обмотках ротора и крутящий момент стают максимальными. Если скорость вращения ротора будет при этом номинальна, мощность, отдаваемая двигателем 1 в нагрузку, также достигает максимального значения. Сумма выпрямленного напряжения Uj мостового выпрямителя тока ротора 3 и напряжения U, мостового выпрямителя 4 тока параметрического стабилизатора 5 тока равна напряжению Uj,yHa входе нерегулируемого инвертора 6 и постоянна по величине
,,.
(О
Напряжение входе регулируемого инвертора 7 равно U., тогда (1) принимает вид
(2
С учетом синусоидальности токов на входе стабилизатора 5 и в обмотках двигателя 1 стабилизатор 5 тока (индуктивно-емкостной преобразователь) генерирует в сеть неизменную по величине реактивную мощность, а схема и параметры его выбраны такими, что генерируемая стабилизатором 5 тока реактивная мощность QCT равна по величине реактивной мощности намагничивания Qog, потребляемой из сети двигателем 1
-Qcr- Q 0(3)
При условии (3) потребляемая из сети электроприводом реактивная мощность Q определяется только суммой реактивных мощностей Qp, и Q потребляемых регулируемым 7 и нерегулируемым 6 инверторами соответственно
. ()
Максимальные напряжения и Ццц регулируемого 7 и нерегулируемого 6 инверторов, выраженные через базовое напряжение Uj, равное напряжению на выходе мостового выпрямителя тока ротора 3 при неподвижном роторе (S 1) двигателя 1, примут вид
, ;(5)
U°c.Uj, ,(6)
где jif , ci - постоянные коэффициенты гч v т и /с т |,
приведения («iM.Jil). Г dn
Установленное напряжение U нерегулируемого инвертора 6 определяется d dw
через угол йи опережения инвертора выражением
(3н о и цсозр„. (7)
Текущее значение напряжения на входе регулируемого инвертора 7 из (2) и (7) определяется вьфажением
Up,iUj,cos|i«-U 5Uj cos/3p. (8)
Реактивная мощность, потребляемая нерегулируемым инвертором 6,
равна
10
Учитывая базовые значения ре ной мощности, потребляемой элек приводом из сети, мощность
QK VUdu-
из (14) и (15) выражение для уд ной реактивной мощности ( потребляемой электроприводом из ти, принимает вид
15 (5-ij),|(2|P-yi)4.r,si
QHu Id HuSin M(9)
Реактивная мощность, потребляемая 20 л выпрямителя тока ротора 3 рав- регулируемым инвертором 7, равна но скольжению S
. .(17)
Так как момент двигателя 1 опре- 25 деляется током Ij
,Ij.
где с - постоянный коэффициент;
Ф, - магнитный поток поля статора двигателя 1, постоянный по величине, относительное значение тока Ij равно относительному значению момента М М/М,, где M,c9,Ij
(18)
V Wi Pp 5 puUdH - °s / p ЗДи|-(Й7)
yIкu4- P
.
Выпрямленный ток 1 стабилизатора 5, выраженный через базовый ток 1. , 0 равный выпрямленному току ротора,при котором крутяпщй момент, развиваемый двигателем, номинальный, определяется выражением
..( О 35
где t - постоянный коэффициент приве- Полагая, что скольжение ротора
дения (F 1).двивателя 1 изменяется от О до 1,
Ток регулируемого инвертора 7 ра-а момент нагрузки не превышает номивен разности токов 1, и 1 и с учетомнального, равно 1. Полагая, что
(11) определяется выражением/ 4 0 (возможно лишь теоретически),
j, /fc . также равно I, а следовательно и
Ip4-S- dH-- -d d4 S - -J .
где ij 1,/ij - относительное значение С учетом принятых условий и выра- выпрямленного тока ро-жений (l6)-(8) удельная реактив- тора двигателя 1. пая мощность, потребляемая приводом С учетом (12) выражение (fO) примет вид
из сети, определяется выражением
-,§(1-м)ф-(1-5)(1-М)л1(2-Б)з: (19)
(5j)Jl-(t: 22P-iyi) (13)Из выражения (J9), следует, что
У50 электропривод при номинальной на- где и,и,/и, - относительное значение грузке (), при любой скорости
напряжения на выходе(скольжении) реактивной мощности
выпрямителя тока ро-из сети не потребляет, т.е. Q (,
тора 3.)0. При электропривод при
Реактивная мощность, потребляемая55 любой нагрузке также не потребляет
электроприводом из сети, согласнореактивной мощности Q (,S-0)0,
вьфажению (4) и с учетом (9) и (13)Q Qvaxc l и . Расчетные
равназависимости б как функции момента М
(14)
Учитывая базовые значения реактивной мощности, потребляемой электроприводом из сети, мощность
QK VUdu-05)
из (14) и (15) выражение для удельной реактивной мощности ()J потребляемой электроприводом из сети, принимает вид
15 (5-ij),|(2|P-yi)4.r,sin/3H.
(16)
Относительное значение напряжеIj M.
С учетом принятых условий и вы жений (l6)-(8) удельная реактив- пая мощность, потребляемая привод
из сети, определяется выражением
для фиксированных значений скольжений в диапазоне от О до 1 представлены на фиг. 4.
Таким образом, при любом скольжении ротора рост момента нагрузки приводит к снижению потребления реактивной мощности электроприводом Кроме того, с ростом скорости вращения (уменьшением скольжения) достигают того же результата. Следовательно, при работе электропривода в номинальном (скорость и момент номинальны) и близком от номинального режима потребление электроприводом реактивной мощности из сети незначительно (близко к нулю). Так как падение напряжения в питающей сети и на потребителях электроэнергии вызывается, в основном, реактивной составляющей полной мощности нагрузки, то снижение потребляемой электроприводом реактивной мощности пропорционально росту момента нагрузки на валу электродвигателя (активной мощности) приводит к росту напряжения на ста- торных обмотках двигателя, росту его магнитного потока и крутящего момента, что дополнительно к воздействию системы регулирования на ток ротора способствует поддержанию заданной скорости вращения ротора, уменьшает динамическое ее отклонение от заданного значения.
Выполнение управляемого вентильного преобразователя реверсивным позволяет повысить перегрузочную способность двигателя.
При необходимости увеличения (например, в пусковых режимах)момента двигателя выше номинального вентили преобразователя 7, составляющие схему регулируемого инвертора и включенные согласно-параллельно мостовому вьтрямителю тока 4 стабилизатора 5 тока, переводят в нерабочий режим (инвертирование не происходит), а вентили преобразователя 7, включенные встречно-параллельно мостовому выпрямителю 4 тока стабилизатора 5 тока и составляющие схему регулирующего выпрямителя, - в режим вьтря- мления. Выпрямленный ток Ij суммируется с током Тр и протекает по цепи выпрямленного тока ротора Т , , При этом ток в роторных обмотках, а значит, момент двигателя 1 становятся
более номинального значения. Ток
-У
при изменении угла управления , выпрямителя 7 может изменяться от 1 при до 21 при , а его полный диапазон изменения составляет от О до 21„.
Потребление реактивной мощности управляемым вентильным преобразователем 7 в режиме выпрямления Q pg остается равным ее потреблению в инвер- торном режиме (,), что следует из (10) и следующих выражений
(.в У1рвЧ1ч ° в;
I, о-Id ) -1р«;
sin(, ISO )-sin|3p.
Таким образом, введение в предлагаемый электропривод переменного тока управляемого вентильного преобразователя обеспечивает в сравнении с известным более высокое быстродействие при регулировании момента и более высокую перегрузочную способность.
Формула изобретения
катодная и анодная группы вентилей которого соединены соответственно с анодной и катодной группами вентилей второго мостового выпрямителя, при этом трехфазный выход управляемого
вентильного преобразователя снабжен выводами для подключения к сети переменного тока.
Ipu Io
4
-гЙЧ
О
10
12
13
фиг.г
Узи1 Цзаг UaciJs
ЛУ«
М.
Фиг.з
ffOM
0,2
/
0,1 0,lf 0,Б 0,8 1
фиг.
/
м
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
