Предлагаемый прибор имеет целью, дать возможность определить свое положение на поверхности земного шара при помощи наблюдения радиосигналов.
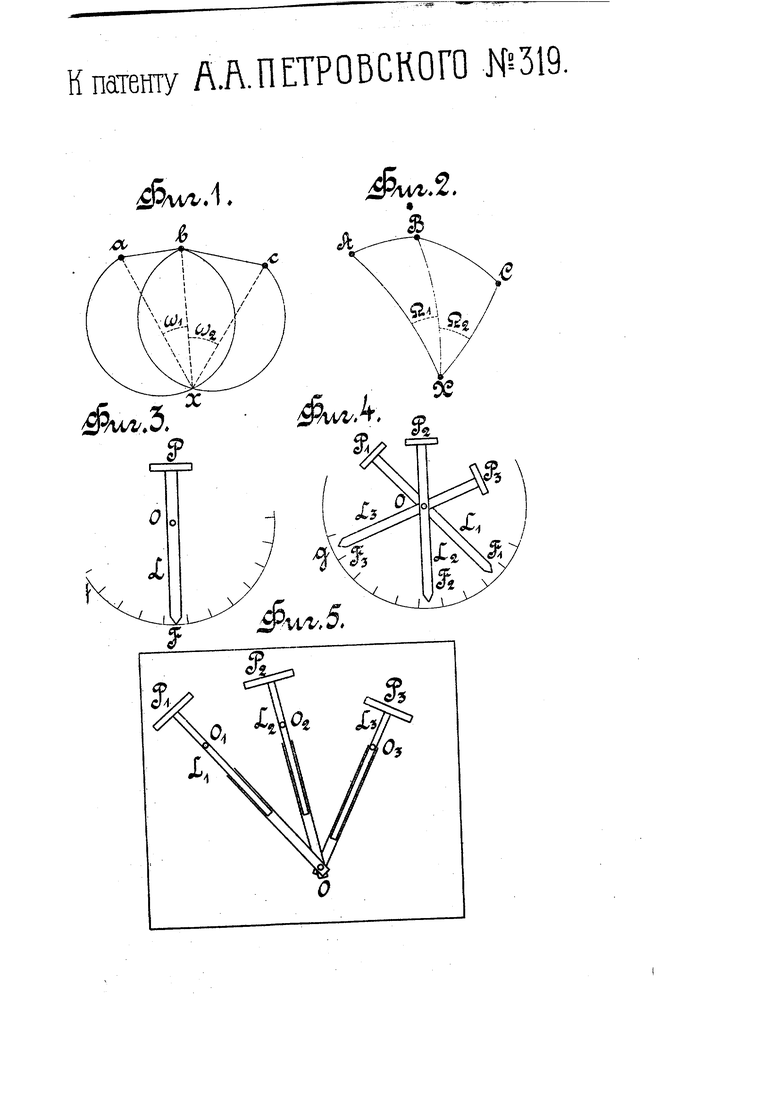
На фиг. 1 и 2 изображены геометрические пояснения, а на фиг. 3, 4 и 5 схемы соответствующих аппаратов.
Идея, иа которой устроен прибор, заключается в следующем;
Пусть имеются три фиксированных точки и, й;С(фиг. 1) и четвертая точка-г, могущая перемещаться. В каком бы месте чертежа ни находилась эта точка х, отрезки аЬ н be будут видны из цее под некоторыми углами, величины которых могут изменяться в пределах от 0° до 180. Из геометрии известно, что все те положения точки х, из которых отрезок ah виден под углом cuj, лежат на окружности, проходящей через точки пи 6 и вмещающей этот угол; точно также все те положения точки х, из которых отрезок be виден под углом ох,, лежат на другой окрун ности, проходящей через точки Лис и вмещающей угол (Uj. Ясно, что то положение точки х из
которого отрезок « 6 виден под углом «, а отрезок 6г виден под углом ш.„ находится в пересечении двух выщеуказанных окружностей. Задача имеет еще второе решение, которое аналогично вышеприведенному и дает некоторое положение точки .V по другую, сторону от ломанной линии а lie, но это не влияет существенно на ход дальнейших рассуждений.
Предположим теперь, что на земной поверхности имеются три радиостанции А, В и С (фиг. 2), передающие сигналы, и что некоторый предмет х (воздуи ный корабль, автомобиль, путешественник и т. п.) перемещается в районе действия этих сигналов. Если он определит направления ХА ХВ ХС, по которым доходят до него сигналы, то он получит два угла Oj и О,, составляемые направлениями больших кругов ХА, ХВ и кругов ХВ, ХС. Геометрическим местом точек, из которых дуга А В видна под углом Q,, будет ие окружность, а некоторая кривая двоякой кривизны, умещающаяся
на сфере; геометрическое место точек,, из которых дуга ВХ видна под углом Й2 также представится некоторою кривою двоякой кргшизны: пересеченна этих двух кривых и дает положение точки X. Углы 2, и Q., могут изменяться в пределах от (f до 180°.
Каждой точке X на зелшой поиерхности, определяемой выглеукязаннылш Зглами QI и 2.;, соответствует вполне определенная точка л-, определяемая, той же величины, углами к шз, и наоборот. Поэтому, если при помощи какого-либо прибора найти величины QJ и И-2 и провести соответствуюнше окружност на чертеи е, то пересечение их укажет точку .г, а следовательно и соответствующую ей точку X зе,миой поверхности, в которой находится подвижной преддгет. Поэтому реп/ение вопроса требует: конструкции специального прибора, способного определять углы Oi и устройства специальной картограммы, на которой возможно, при помощи вышеописанного построения, находить искомую точку.
Прибор предлагается в трех вариантах :
По ггервому варианту приемная /- (фиг 3} укреплена перпендикулярно на конце линейки L, вращающейся около осп о. Лругой конец линейки имеет указатель F, движущийся на луге G, разделенной на градусы. Г/ри помощи настроенного радиоприемника с соответствующим колпглектом усплигелей наблюдатель получает сигнал станции А и, поворачивая линейку с рамой около оси, достигает его исчезновения. В этот д{одгент рамка направлена плоскостью f/ерпендикулярно, а линейка напрааг(ела по паправлению распространения приходящей волны. Отметив положери1е указателя и повторив то же самое для станций Ь и С, можно отсчитать углы 1-}, и 2., и, следовательно, найти положение точки Л .
Но второму варианту три приемных рамки PI, Л J: СФП. 4), устроенные гак же, как и в первом варианте, при гнмощч переключателя, действующего вручную или автодгатически, поочередно присоединяются к приемнику; тгоследний состоит из трех частей, каждая из которых пас7роена в резонанс, соответственно, на сигналы станций А, В н С. Поворйнивая линейки L, Ь„ .и Z,- вокруг оси вращения О, наблюдатель добивается того, чтобы при работе переключателя сигнал не появлялся ни на одно А)гновение. В таком случае, каждая из трех линеек направлена вдоль соотеетству/ощего направления распространения волны и углы 2), Qj отсчитываются по дуге единовременно.
По третьему варианту вся система рамок и линеек устроена так же, как в первом варианте, но каждая линейка LI, Zg, L;; вращается около своей оси О,, с),, Од (фиг. 5); кроме того, каждая линейка снабжена, вдгесто указателя, продолжением, также в ввде линейки, которая может выдвигаться и вдвигаться подобно трубе тромбона; концы всех продолжений линеек устроены ходящими в обхватывающих их част$гх Он Q-i Q-.i и соединены общим uiapниром О. При этом картограмма полкладывается под систему линеек так, чтобы точки а, li я с, изображающие радиостанции, были на продолжениях осей О, О.,, О,, вращающихся линеек; при этом управление производится во вредш наблюдения, как поворотод ллнеек, так и выдвиганием (или вдвиганием) их продолжений, таким образод, чтобы сигнал не появлялся ни на одно мгновение; наблюдатель тем самым сразу же определяет точку л-, которая находится как раз под щарниром О, а с;гсдовательно без всяких дополнительных пос7роений находит и свое местопо.Южение.
Расчет и вычерчивание сетки и контуров условных изображений материков, и проч. делается по дгетодам, излагаемым в сферической тригономс7рии.
п iMi д д( е т изо ь i н т Е н и я .
1. Прибор для определения при помощи радиосигналов местоположения движущегося ггредмета, отличающийся тед1, что он состоит из новоротной вокруг оси О (фиг. 3) линейки L, несущей на одно.м конце приемную раму Р, а на другодг Koinie снабженной указа-, телем / холящим против дуги 6. с градусным-и делениими.
К .. 6 о :Sr. ;Г
2. Видоизменение описанног о в п. 1 1 прибора, отличающееся применением ; трех линеек L,, L., L--,, поворотных ; НГ «округ общей оси вращения О (фиг. 4),
:гт:: г «Ь г.:снабженных на одних концах приемными рамами PI, Р1, Р;., а на других .,«концах несущих указатели , /„, Fy ходящие против дуги круга G с грапиром о.
3. Видоизменение описанного в и. 1 дусными делениями. нрибора, отлича1ощееся теьи что линей
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для механической разбивки многоугольника, заснятого с натуры, на участки различных заданных площадей | 1928 |
|
SU15333A1 |
| Командирский угломер | 1929 |
|
SU26067A1 |
| Прибор для графического определения приращений прямоугольных координат | 1932 |
|
SU34767A1 |
| Прибор для построения перспективных изображений по их ортогональным проекциям | 1949 |
|
SU82846A1 |
| Прибор для деления углов на равные части | 1934 |
|
SU40577A1 |
| Чертежный прибор для преобразования плоских фигур | 1977 |
|
SU772902A1 |
| Математический прибор | 1978 |
|
SU749696A1 |
| Чертежный прибор для построенияАКСОНОМЕТРичЕСКиХ пРОЕКций | 1979 |
|
SU827330A1 |
| Прибор для измерения и масштабного вычерчивания линий и углов и для вычерчивания дуг круга | 1925 |
|
SU2973A1 |
| Комплексный компенсатор | 1939 |
|
SU66356A1 |