Изобретение относится к системам автоматического управления и может быть применено для автоматической оптимизации электрического режима телевизионных преобразователей свет-сигнал, в которых показатель процесса имеет экстремальную зависимость от регулируемого параметра, например режима передающей телевизионной трубки типа суперортикон но напряжению фотокатода . Показателем процесса f(X} является величина высокочастотных составляющих видеосигнала, снимаемого с этой трубки.
Для решения подобной задачи применяются известные цифровые оптимизаторы на логических элементах, содержащие в своем главном контуре регулирования коммутирующее устройство, преобразователь аналог-число, запоминающее устройство, кольцевой счетчик, операционный и иснолпительный блоки и шаговый регулятор. Кольцевой счетчи-к и коммутатор обеспечивают определенное число замеров показателя процесса в течение первого цикла, преобразователь превращает эти замеры в числа, которые записываются в запоминающее устройство. В начале второго цикла ироисходиг пробный шаг регулируемого параметра, но запись в запоминающем устройстве идет с другим знаком. Результат двуцикличной записи передается В операционный и исполнительный блоки, откуда поступает
команда в регулятор на совершение рабочего шага.
Вследствие того, что показатель процесса при оптимизации режима передающей телевизионной трубки содержит высокоинтенсивные случайные составляющие, известные цифровые онтимизаторы не могут обеспечить требуемой точности и быстродействия, так как конечное число замеров в течение одного цикла и разовое сопоставление результата дву. циклов не дают достаточно достоверных данных об относительной оценке показателя процесса f(X) на протяжении пробных шагов. Предложенный цифровой автоматический
оптимизатор обеспечпвает более высокие точность и быстродействие за счет того, что в главный контур управления введены частотно-импульсный модулятор, обеспечивающий непрерывное малоинерционное преобразовапие аналог-число, и блок последовательного анализа. Кроме того, предлагаелгый цифровой автоматический оптимизатор в целом более прост и содержит меньшее количество элементов.
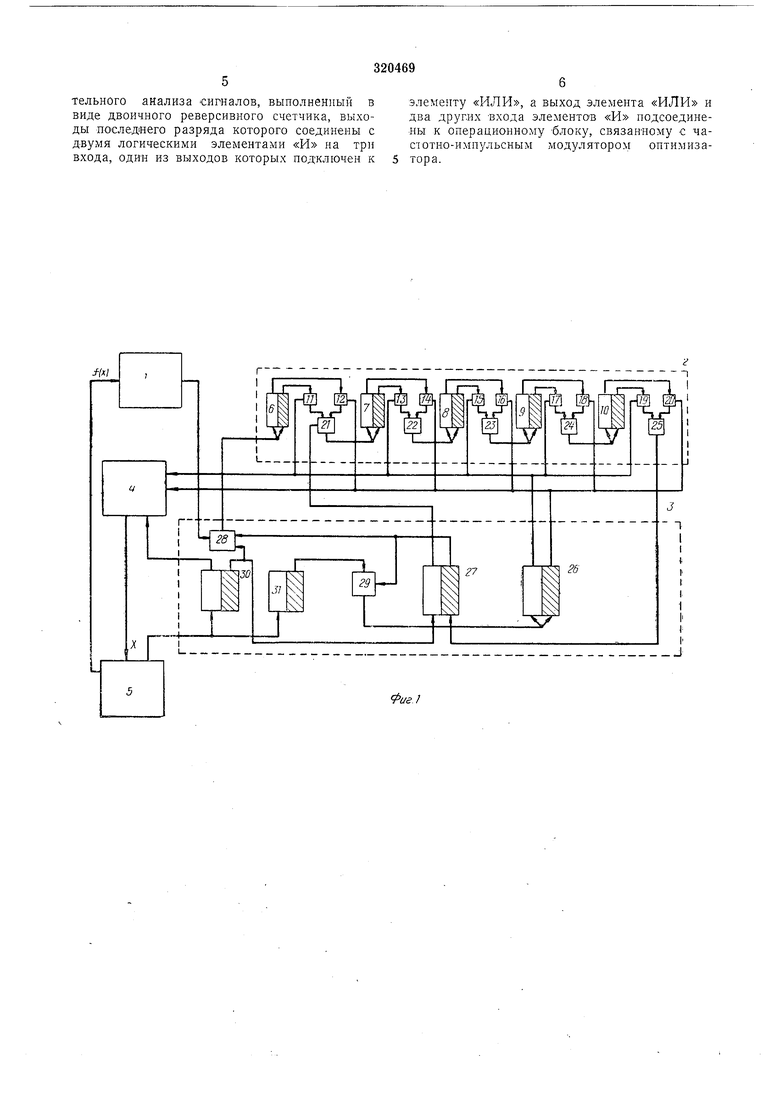
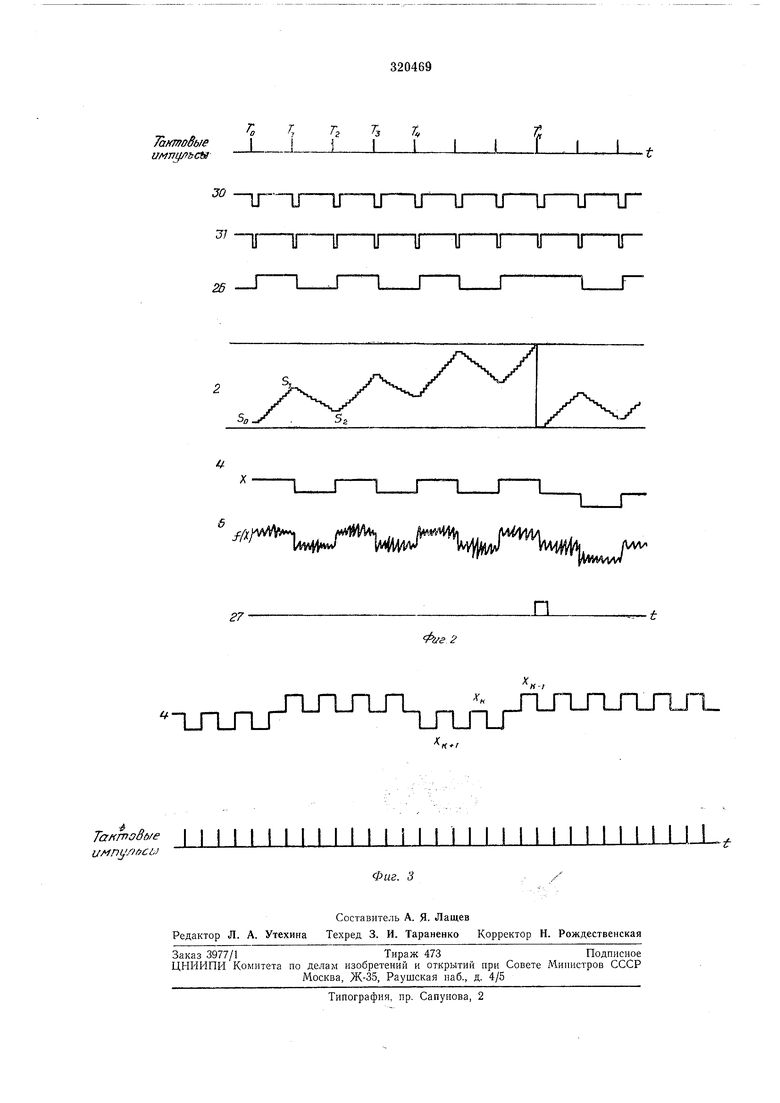
На фиг. 1 изображена блок-схема цифрового авто.матического оптимизатора; иа фиг. 2 и 3 - импульсные диаграммы, поясняющие принцип его работы. По оси абсцисс диаграмм представлено ние бло-ков, имеющих аналогичные номера на фиг. 1. Цифровой автоматический оптимизатор состоит из частотно-импульсного модулятора /, блока последовательного анализа 2, опера-5 ционного блока 3 и исполнительного блока 4, который регулирует процесс в объекте. В качестве модулятора применен транзисторный мультивибратор с коллекторно-базовыми связями и управляемым смещением наЮ базах. Блок последовательного анализа представляет собой двоичный реверсивный счетчик, содержащий триггеры 6-10, логические эле-. менты «И и-20 и элементы «ИЛИ 21-25.15 Операционный блок 3 состоит из триггера реверса 26, блокирующего триггера 27, ячеек «И, 28, 29 и ждущих мультивибраторов 30, 31 (время нестабильного состояния первого из них больше, чем у второго, но составляет20 менее 0,1 общего времени такта). Шаговый исполнительный блок содержит, например, счетчик, подобный примененному в блоке последовательного анализа, пассивный преобразователь число-аналог и согласую-25 щий усилитель постоянного тока. Объектом регулирования является телевизионная передающая трубка 5 (например, суперортикон ЛИ-17), подключенная своим фотокатодом к выходу исполнительного бло-30 ка 4. Телевизионный сигнал (усиленный, селектированный по высокой частоте и нродектированный) является показателем процесса f(X) и подается с выхода трубки 5 на вход35 модзлятора 7. Тактовыми импульсами оптимизатора являются кадровые синхроимпульсы, подаваемые с трубки 5 в операционный блок 3. В момент Го поступает тактовый импульс, запускающий мультивибраторы 30, 31.40 Первый из них ВО время своего нестабильного состояния потенциалом второго плеча посредством ячейки «И 28 перекрывает вход импульсов модулятора / в блоК последовательного анализа 2 и передним фронтом им-45 пульса первого плеча производит изменение на один шаг регулируемого параметра X в блоке 4. В течение времени нестабиль)юго состояния мультивибратора 30 мультивибратор 31 задним фронтом импульса второго пле-50 ча опрокидывает триггера реверса 26, чем исключается совпадение момента реверса счетчиков оптимизатора с импульсами на их счетных входах. При наличии начального состояния So в блоке последовательного авали-55 за 2 и положительного направления записи к моменту времени TI показания в блоке 2 будут 5 (при условии непереполнения). Величина S - So пропорциональна среднему показателю процесса f(Xoi) за время TI - Го60 для установленного параметра XQ. го анализа 2 величины /(12) из величины f(Xoi). Вследствие малости шага (Xi - 01), f(Xoi) и f(Xiz) отличаются незначительно, поэтому предельное нижиее состояние в 2 не будет превзойдено, третий тактовый импульс в момент Гз устанавливает 23 01, и вся процедура повторяется. Очевидно, что переполнение в блоке 2 происходит на некотором К-ом такте при следующих соотношениях показателя процесса для нечетных f(oi} и четных f(Xi2) щагов: переполнение по )верхней границе c/j )(X / v oi; 12} (показано на диаграмме фиг. 2); переполнение по нижней границе /(Хо,)/№2). Перенолнение в блоке 2 сопровождается появле-нием выходного импульса элемента 25, опрокидывающего триггер 27, который блокирует посредством ячейки 28 дальнейшую подачу имнульсов модулятора в блок 2, а также посредством ячейки 29 запрещает подачу очередного импульса на вход триггера реверса 26. Последнее обстоятельство сохраняет неизменным состояние триггера реверса на протяжении следующего такта и поэтому ближайщий входной импульс исполнительного блока 4 вызывает продвижение параметра X В сторону меньшего значения f(X) вместо соверщаемого ранее возвратного движения, Рассмотренный алгоритм оптимизатора рассчитан на поиск минимального значения f(X), что не является принципиальным для оптимизатора в целом. Ближайшее после переполнения блока 2 срабатывание мультивибратора 30 восстанавливает задним фронтом импульса второго плеча начальное состояние триггера 27, который при этом перебросе задает в элемент 21 импульс установки начального состояния So в блоке 2, после чего начинается новый цикл последовательного анализа, Практически для щагового иснолнительно.го блока 4 и дрейфующей величины показателя процесса f(X) условие строгого равенства f{Xji-,XK)f(XK,XK+i) даже в точке экстремума будет при некоторых значениях параметра Хк-, Хк, XK+I, причем время пребывания в интервалах , Хк и , Хк+ обратно пропорционально градиенту - f(X) в данных интервалах (фиг. 3). 0.x Предмет изобретения Цифровой автоматический оптимизатор. содержащий операционный и шаговый исполнительный блоки, а также логические элетельного анализа сигналов, выполненный в виде двоичного реверсивного счетчика, выходы последнего разряда которого соединены с двумя логическими элементами «И на три
входа, один из выходов которых подключен к 5 тора.
элементу «ИЛИ, а выход элемента «ИЛИ и два других входа элементов «И подсоединены к операционному блоку, связанному с частотно-импульсным модулятором оптимиза
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1968 |
|
SU212356A1 |
| Следящий аналого-цифровой преобразователь сигналов низкого уровня | 1988 |
|
SU1621139A1 |
| ЦИФРОВОЙ ШИРОТНО-ИМПУЛЬСНЫЙ МОДУЛЯТОР | 1971 |
|
SU305577A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU959145A1 |
| Устройство для отображения информа-ции HA эКРАНЕ элЕКТРОННО-лучЕВОйТРубКи | 1979 |
|
SU847343A1 |
| Устройство для измерения расстояния между центрами двух изображений точечного объекта | 1990 |
|
SU1788597A1 |
| Способ измерения электрофорезной подвижности частиц | 1978 |
|
SU940040A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ НЕСУЩИХ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 1972 |
|
SU360277A1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
| Телевизионное устройство для формирования сигнала изображения объекта | 1989 |
|
SU1700764A1 |
т,Гг 7з 4
Тантовые
иМЛ11/ ЬСЫ
да
-лг
31
1Г
7
т т
х
