Настоящее изобретение относится к области измерительной техники.
Известны устройства для измерения вибрации вращающихся объектов, например лопаток турбин, содержащие импульсные измерительные датчики, установленные на статорной части против участков испытываемых объектов, соединенные через переключатель с блоком обработки информации, и импульсные командные датчики с переключателем, установленные против меток ротора.
Предлагаемое устройство позволяет повысить точность измерений благодаря тому, что оно снабжено управляющим импульсным датчиком, соединенным с управляющим входом переключателя импульсных командных датчиков, и тарировочным датчиком, включенным между блоком обработки информации и выходом переключателя импульсных командных датчиков, другой выход которого соединен с управляющим входом переключателя импульсных датчиков.
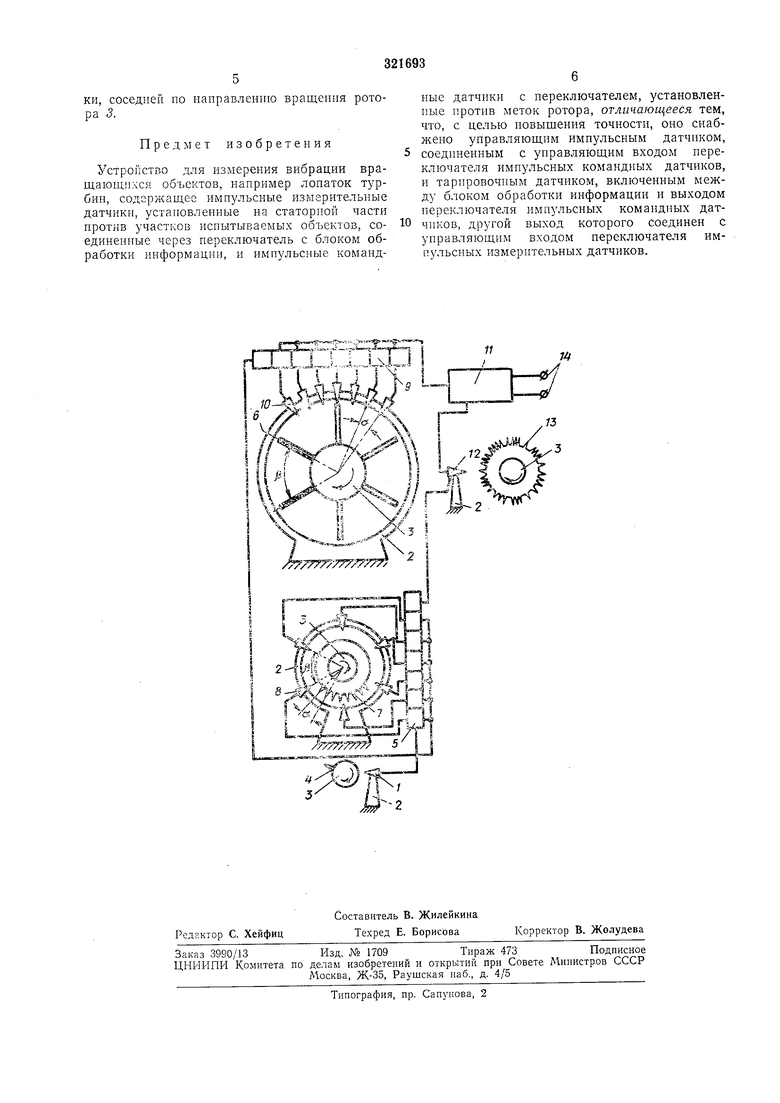
На чертеже представлена принципиальная схема предложенного устройства, на которой показано расположение импульсных датчиков в различных поперечных сеченнях машины п электрическое соединение этих датчиков с электронными узлами.
ляющей меткой 4, которой , напрнмер, служить запрессованный в ротор штифт.
Датчик 1 электрпчески соединен с унравляющим входом кольцевого нереключателя 5, которым молхет служить, нанрнмер, электронный переключатель, собранный по обычной кольцевой пересчетной схеме, переключающий своп звенья последовательно по кольцу при подаче па ее управляющий вход управляющпх пмпульсов. Количество переключаемых звеньев кольцевого переключателя 5 па едпП1щу больше числа контролируемых лопаток 6. На окружности ротора 3 имеется серия
командных меток 7, которыми конструктивно )oгyт служить, напрнмер, запрессованные в ротор 3 шт;1фты, либо колесо с зубчатыми секторами, жестко связанное с ротором 3. Угловое расстояппе между соседними меткаМП 7 равпо ее. Против меток на статоре 2 рас1;оложепы импл тьсные командные датчики 8. Все колишдпые датчики 8 пдептичпы и расположепы по окружностп с угловы.м расстояппем р, равным yглoвo iy расстояшно между
коптролпрусмымп лопатками 6. Каждый командный датч:1К L соединен с соответствующим переключающпмся звеном кольцевого переключателя 5. Переключающийся выход кольцевого передом аналогичного измерительного кольцсво о переключателя 9.
Колычсст1;о :;всньсз пзмс1} ггсль :ого iie.jcключателя 9 равяо количеству меток 7. Иа окружностях етатора 2 нротив :е|};,фер;л 1плх участкои лопаток 6 установлена груи.:а нмиульепых ;змер;1те. jijbix да1чнкос 10. Вес lu;мернтсльпые датчнк; идентичны н )аслола1аются иа частА окружности етатора 2 с угловым раеетояннем, равным угловому раеетояпию между комаидпымн меткамн 7. 1(оличеетво измерительных датч1н ов JO на еднннцу меньше колнчеетва командных глегок 7. Измерительные датчика вынолнены передвижными вдоль радиальиых направленнй. Каждый измерительный датчик соединен е еоответетвующим звеиом пз,1ерител}люго иереключателя 9. Переключающийся выход измерительного переключателя 9 еоединеи ео входом электронного нреобразователя 11, с которым в свою очередь еоедине имнульеный тарировочный датчик 12, связанный с одгним нз звеньев кольцевого переключателя 5. Тарировочный датчик 12 уетаиовлеи на статор.е 2 нротив тарировочных меток 13, расноложс ных е переменным ппагом i;;i окружности ротора 5.
Тарировочиыми метками 13 м01Лт c.iyjKirrb, например, заиреееованпые в ротор 3 штифты, либо зубчатое колесо, .жестко евязаниое с ротором.
Выходные клеммы 14 электроиного нреобразователя 11 служат для иодеоедниения к нему злектрорегиетрирллощей или элсктроьзме)ительной аннаратуры.
Донуст1Н 1, что ротор 3 мапнннл е;;ве})1нает вращательное двпжепие в направлении, указанном на чертеже дуговой етрелкой. Схемы переключателя 5 и 5 вынолнеиы таким образом, что при иодключе н-ш источника иа.мягн (на чертеже не указан) ко всей схеме включенными оказываются звепо тарнровочиого датчика 12 в переключателе 5 и свободное (на чертеже левое) звено в переключателе 9. При прохождепии управляющей метки 4 против датчика / последний вырабатывает управляющий импульс, который переключает управляющий вход иерек.тючателя 9 с тарировочного звена переключателя 5 на еледующее по кольцу звено (по чертелсу нижнее), к которому подключен непосредственно командный датчик 8. Угловое расположение унравляющей метки 4 и командных меток 7 выбрано с таким раечетом, что имнульс управляющего датчика / появптся несколько позже того момента, когда ноеледняя нз командных меток 7 пройдет мимо командного датчика о. Метки 7, поворачиваясь с ротором 3, ;юдойдут к комаидному датчику 8, KCTG гы{ i-i течение времеии всего этого оборота электрнчоекн соединен через Н1жнее 3 ie;io не сключ;.теля 5 с управляющим входом перс -;лю1а:сля 9, так как управляющий датчлк / вырабатывает один импульс за время одно10 оборога ротора 5. Бзаим |0с расположение 1 ом;1;дных меток 7 и лонаток 6 рассчитано образом, что перва;;, но 1ил1разлон1по lipaFHCния, MLTKa / нройдет M.:MO ,Д1;о;0 датчика о несколько })аньше, чем лопатка 6 м..мо 5 иза;ер Г1елы10.о д:/1Ч11ка 1Q. Имнул с, вы.л;бот:ил;ын ьома ;д1;ым д.пчьком 8 при прохижденаи мимо него лерво метки 7, пр01;дст через j;; яснее зг5С1;о ;;с,)ск,лоч;-,1еля 5 на унравляющи 1 вход ие ;1еключателя 9 л иере0 KJjK)i:iT вход элек1:н)1ого ::реобразователя Jl со свободного знеиа, к которому он сы.т нодключеи с момента иодачи иитаиия на схему, iia следящее звено, к которому подсоединен датчик 10.
5 Таким образом, измерительный датчик 10 окажется подключенным ко входу электронного преобразователя 11. Е момент арохождеиия лопатки 6 мимо измерительного датчика 1G последний вырабатывает первый измерительный импулье, который воспринимается иреобразователем 11. Вследствие равенства углового {расстояния я между соседними командными ,1етками 7 угловому раеетоянию между соседними измернтельиымн датчиками 10, носледиие будут подключаться ко входу электоокиого :рсобразователя // несколько paiHHJie, чем лоиатка 6 нройдет мимо данного датчик:; 1G. Таким образом, достигается стробированне данной лоиатки 6. Имиульеы,
0 выработаиные поочередно измерительиымн датчиками 10, вследствие прохождеиия мимо них одной и той же лонатки 6, ноетупам иа электроиный нреобразователь 11, преобразуются носледним в электрический сигнал, про5 иорциональный нх фазе. Так как угловые расстояния между соседннми измерительнымн датчиками 10 строго раьиы между собой, фаза пмиульсов, вырабатываемых измерительными датчиками 10 поочередно при прохождении мимо одной и той же лоиатки 6, иропорциопальпа пропорциопальным во времени вибросмещеиию данной лоиаткн 6. Так как колнчеетво командных меток 7 на единицу больше колнчеетва нзмерительных датчиков 10, то после прохождеиия лопатки 6 мнмо последнего датчика 10 переключатель 9, включая е.зое свободное звено, приходит в нсходпое положение.
0 По завершении ротором 3 полного оборота метка 4 опять пройдет мимо управляющего датчика ./. Выработаппый прп этом управляющим датчиком 1 переключающий импульс переключит посредством переключателя 5
5 управляюш,ий вход переключателя 9 с первого управляющего датчика 8 па следующий в пйиразлеипн, проттпюиоложном направлению BpanieHini росторя 5, датчнк этой груины. Вследствие того, что угловое раестояиие ju
0 между соседи ;мн у 1равл :юи;11мп датчиками 8 равно угловому расето;::1ню между соседниivUi лоиаткамн б, имну;;ьсы, вырабатываемые следующ;:м ;к;дкл10 ;ен1нлы датчиком 8 ири прохожде; ;;.; мнмо iiero ; 1еток 7, будут оеуки, соседней по направлению вращения ротора 3.
Предмет изобретения
Устройство для измерения вибрации вращающихся объектов, например лопаток турбин, содержащее импульсные измерите„1ьные датчики, установленные на статорной части против участков испытываемых объектов, соединенные через переключатель с блоком обработки информации, и импульсные комаидные датчики с переключателем, установленные протнв меток ротора, отличающееся тем, что, с целью повышения точности, оно снабжено управляющпм импульсным датчнком, соединенным с унравляющим входом переключателя импульсных командных датчиков, н тарпровочным датчнком, включенным между блоком обработки информации и выходом переключателя импульсных командных датчиков, другой выход которого соединен с унравляющим входом переключателя импульсных измерительных датчиков.
Ц5-иц..А.-.1 -..
rLLlJJ1.ц1
AJ, J 1
,-- f
/ 77777 777777Т/ 2
