1
Изобретение относится к области автоматизапии силовых установок.
Известны системы дистанционного автоматического управления установкой из нескольких силовых агрегатов, кинематически связанных с общим выходным валом, содержащие регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и снабженные управляющими блоками каждого агрегата, взаимодействующими с переключателем режима работы.
Однако в известных системах загрузка каждого из агрегатов не контролируется, что приводит к перегрузкам одних и недогрузкам других агрегатов.
С целью равномерной загрузки силовых агрегатов в предлагаемой системе регулятор одного из них (ведомого) соединен с дозирующим органом при помощи переключающего механизма, а другой (ведущий) агрегат снабжен датчиком режима, управляющим переключающим механизмом. Переключающий механизм выполнен в виде дифференциального звена, взаимодействующего с установленным на выходном звене регулятора ведомого агрегата тормозом и с сервомеханизмом, снабженным фиксатором.
Сервомеханизм снабжен упором минимальной подачи топлива.
Датчик режима выполнен в виде измерителя угловой скорости ведущего агрегата.
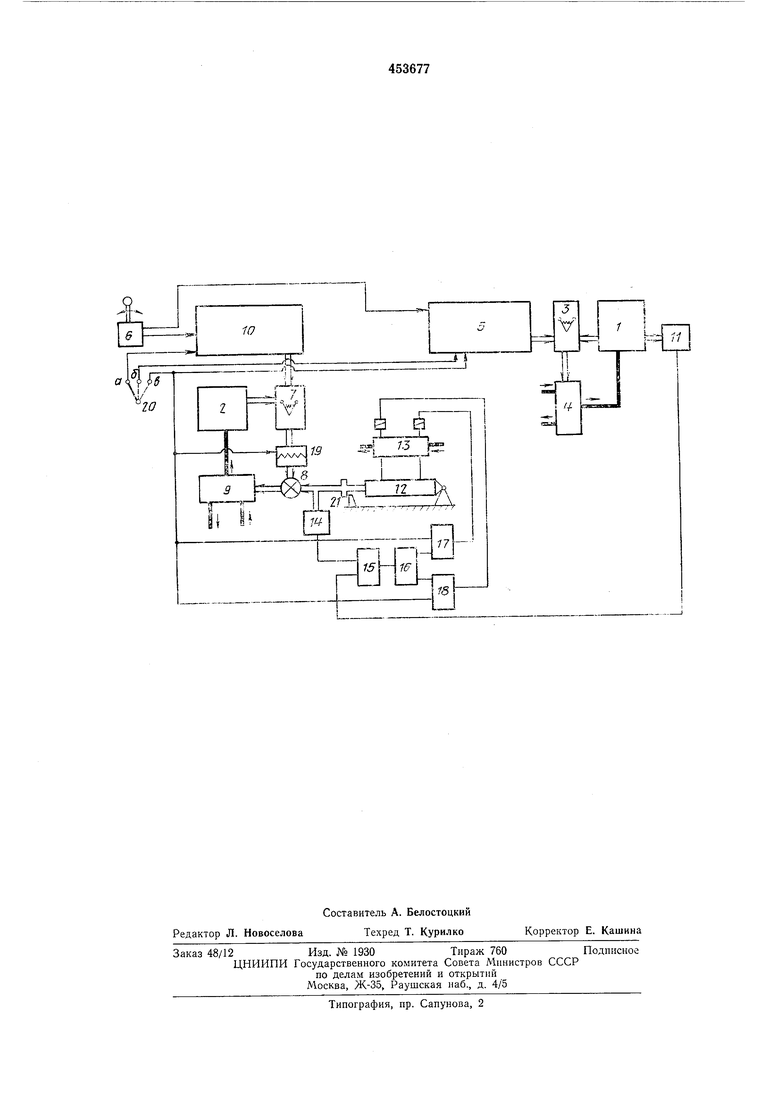
На чертеже схематически представлен один из вариантов выполнения предлагаемой системы.
Ведущий силовой агрегат 1 и ведомый силовой агрегат 2 кинематически связаны с общим выходным валом (не показан). Агрегат 1 кинематически связан с регулятором 3 режима, который кинематически подключен к дозирующему органу 4 топливоподачи. Регулятор 3 связан командным каналом с управляющим блоком 5, подключенным к задающему командному органу 6.
Ведомый силовой агрегат 2 кинематически связан с регулятором 7 режимов, который кинематически подключен при помощи дифференциального звена 8 к дозирующему органу 9 топливоподачи. Регулятор 7 связан командным каналом с управляющим блоком 10, также подключенным к задающему командному органу 6.
Для совместной работы ведомого и ведущего агрегатов последний снабжен датчиком
11 режима.
Для управления дозирующим органом 9 при совместной работе агрегатов к дифференциальному звену 8 кинематически подключен сервомеханизм 12, гидравлически связанный
с электрогидравлическим преобразователем
13 и кинематически - с датчиком 14 обратной связи. Выход датчиков 14 и 11 подключен ко входу сумматора 15, выход которого через фазочувствктельный элемент 16 и логические элементы «И 17 и 18 подключен к обмоткам преобразователя 13.
Для обеспечения поочередного подключения регулятора 7 и сервомеханизма 12 через дифференциальное звено 8 к дозирующему органу 9 выходное звено регулятора 7 снабжено унравляеу ым тормозом 19, а сервомеханизм 12 снабгкен внутренним фиксатором, фиксирующим положение его выходного органа при отсутствии управляющего сигнала.
Для выбора режима работы система снабжена трехпозипионным переключателем 20, подключенным к управляющим блокам 5 и 10, тормозу 19 п входам элементов «И 17 и 18. Сервомехаиизм снабжен уиором 21 минимальной подачи топлива.
Система работает следующим образом.
Для обеспечения совместной работы ведущего и ведомого агрегатов с равномерной загрузкой необходимо вывести из работы регулятор 7 ведомого агрегата и осуществить управление дозирующим органом 9 топливонодачи от ведущего агрегата 1. Для этого переключатель 20 устанавливается в положение в. При этом снимается унравляющий сигнал с блока 10, выходное звено регулятора 7 затормаживается тормозом 19, что создает условия для управления дозирующим органом 9 от сервомеханизма 12. Управляющий сигнал на управление органом 9 формируется на входе сумматора 15 как разность сигналов от датчика 14 обратной связи и датчика 11 режима ведущего двигателя. При наличии сигнала рассогласования на выходе сумматора 15 этот сигнал преобразуется фазочувствительным элементом 16 (в зависимости от полярности сигнала) в управляющие сигналы, поступающие на входы элемента «И 17 (18). При наличии на входах элемента «И 17 (18) сигналов от переключателя 20 режимов на выходе элемента «И 17 (18) появляется управляющий сигнал, поступающий на соответствующую обмотку преобразователя 13. Последний подает рабочую жидкость в соответствующую полость сервомеханизма 12, изменяющего подачу топлива в агрегат 2. При выравнивании сигналов на входе сумматора 15 унравляющие сигналы на преобразователь 13 снимаются, сервомеханизм становится на внутренний фиксатор. Для предотвращения остановки ведомого
агрегата 2 в случае резкого изменения режимов ведущего агрегата 1 сервомеханизм 12 снабжен упором 21 минимальной подачи топлива, обеспечивающим устойчивую работу ведомого агрегата 2.
Предмет изобретения
1.Система дистанционного автоматического управления установкой из нескольких силовых агрегатов, кинематически связанных с общим выходным валом, содержащая регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и снабженные управляющими блоками каждого агрегата, взаимодействующими с переключателем режима работы, отличающаяся тем, что, с целью равномерной загрузки силовых агрегатов, регулятор одного из них (ведомого) соединен с
дозирующим органом при помощи переключающего механизма, а другой (ведущий) агрегат снабжен датчиком режима, управляющим иереключающим механизмом.
2.Система по п. 1, отличающаяся тем, что переключающий механизм выполнен
в виде дифференциального звена, взаимодействующего с установленным на выходном звене регулятора ведомого агрегата тормозом и с сервомеханизмом, снабженным фиксатором.
3. Система по пп. 1 и 2, отличающаяс я тем, что сервомеханизм снабжен упором минимальной подачи топлива.
4. Система по пп. 1 и 3, отличающаяс я тем, что датчик режима выполнен в виде
измерителя угловой скорости ведущего агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления многовальной судовой силовой установкой | 1976 |
|
SU612849A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕЛ\А УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПОВОРОТА ТРАКТОРА | 1970 |
|
SU270366A1 |
| Стенд для испытания моторно-трансмиссионной установки транспортного средства | 1984 |
|
SU1219933A1 |
| Система управления подачей топлива в двигатель внутреннего сгорания | 1980 |
|
SU877153A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Гидромеханическая трансмиссия транспортного средства | 1988 |
|
SU1599251A2 |
| СИСТЕМА ЦЕНТРАЛЬНОГО ВПРЫСКА ГАЗА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2120052C1 |
| Система автоматического и дистанционного управления многодвигательной силовой установкой | 1980 |
|
SU924418A1 |