Данная следящая система электромеханического типа может быть использована в аналоговых вычислительных машинах и системах автоматического управления.
Известны следящие системы, обеспечивающие согласование фаз сравниваемых входных напряжений в заранее рассчитанных точках, содержащие решающий блок в виде последовательно соединенных фазирующего резистора, линейного, масштабного и синусно-косииусиого вращающихся трансформаторов, причем выход решающего блока через усилительно-преобразовательный блок подключен к управляющей обмотке исполнительного двигателя, вал которого через редуктор кинематичеСКВ соединен с ротором линейного вращающегося трансформатора.
В известной схеме фазы суммируемых напряжений на входе усилительно-преобразовательного блока согласуются с помощью фазирующего резистора, включенного в цепь возбуждения линейного вращающегося трансформатора. Сопротивление резистора подбирают в процессе регулировки следящей системы. Фазирующий резистор позволяет согласовать фазы суммируемых напряжений и свести к минимуму ошибку следящей системы только в заранее определенном согласованном положении датчиков. Отсутствие согласования по фазе суммируемых напряжений в остальных
точках рабочего днапазона решающего блока вызывает появление квадратурной составляющей на входе усилительно-иреобразовательного блока, которая превысить линейную часть характеристики усилителя. При насыщении усилительно-преобразовательного блока квадратурной помехой, обусловленной фазовыми сдвигами между с мм1фуемыми напряжениями, существенно увеличивается моментная составляющая ошибки. Фазовые сдвиги между су.ммируемыми напряжениями в реальных решающих блоках могут привести к увеличению суммарной ошибки в несколько раз. Перечисленные недостатки такого способа согласования суммируемых наиряжений по фазе не позволяют создать решаюшую следяшую систему высокой точности.
Цель изобретения - повышение точности работы следящих систем аналоговых вычислительных машин и систем авто.матического управления. Достигается она тем, что предлагаемая следящая система снабжена автоматическим регулятором фазы, состоящим из носледовательно соединенных усилителя напряжения, фазочувствительного выпрямителя и управляемого элемента, причем вход усилителя напряжения соединен со входом усилительно-преобразовательного блока, а управляемый элемент подключен к фазирующе.му резистору решающего блока.
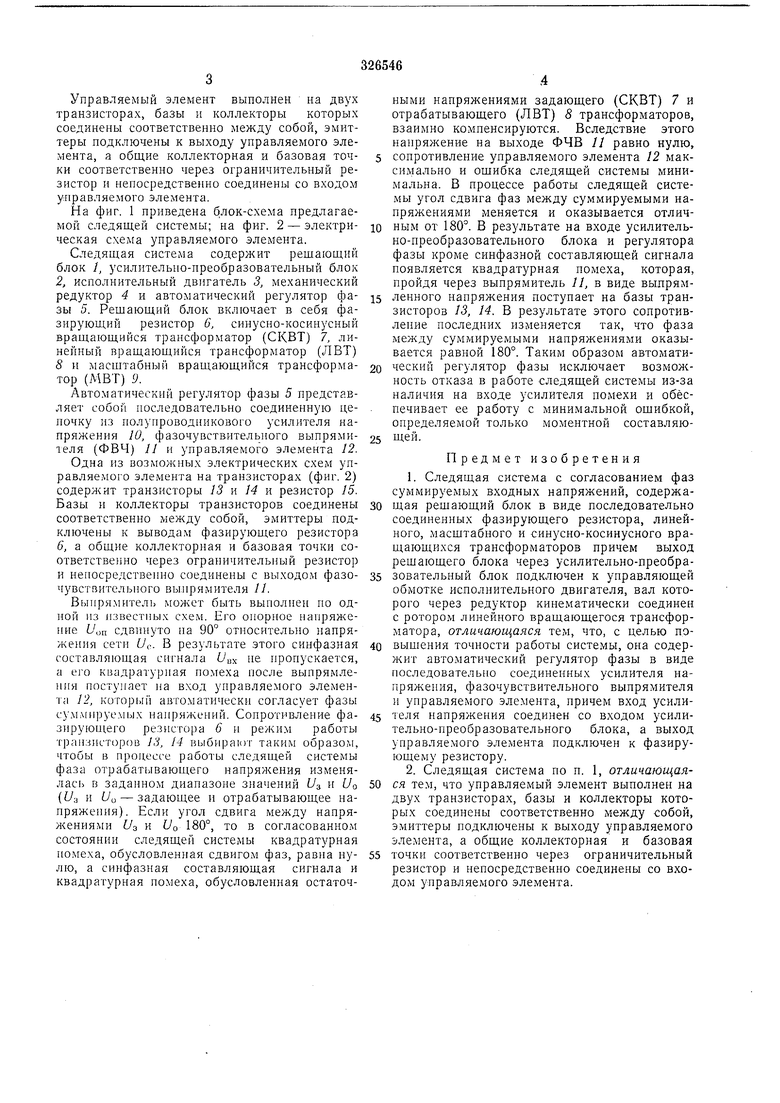
Управляемый элемент выполнен на двух транзисторах, базы и коллекторы которых соединены соответственно между собой, эмиттеры подключены к выходу управляемого элемента, а общие коллекторная и базовая точки соответственно через ограничительный резистор и непосредственно соединены со входом управляемого элемента.
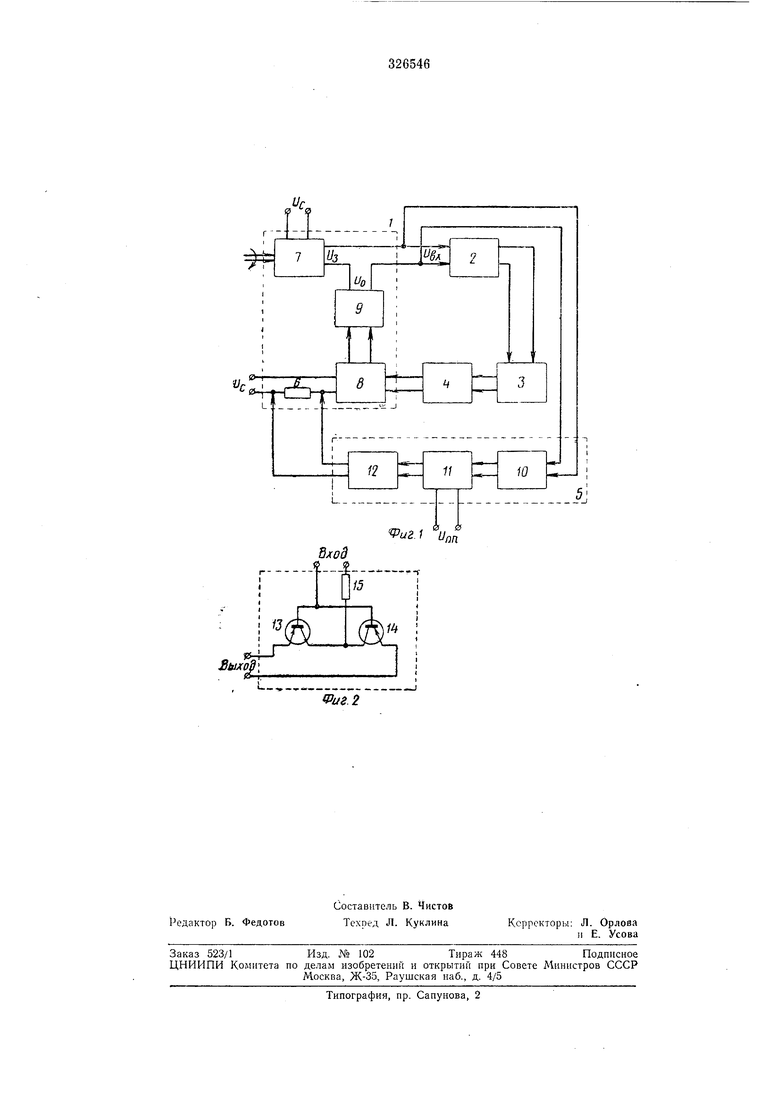
На фиг. 1 приведена блок-схема предлагаемой следящей системы; на фиг. 2 - электрическая схема управляемого элемента.
Следящая система содержит решающий блок 1, усилительно-преобразовательный блок 2, исполнительный двигатель 3, механический редуктор 4 и автоматический регулятор фазы 5. Решающий блок включает в себя фазирующий резистор 6, синусно-косинусный вращающийся трансформатор (СКВТ) 7, линейный вращающийся трансформатор (ЛВТ) 8 и масн1табный вращающийся трансформатор (МВТ) 9.
Автоматический регулятор фазы 5 представляет собой последовательно соединенную цепочку из полупроводникового усилителя напряжения 10, фазочувствительного выпрямителя (ФВЧ) И и управляемого элемента 12.
Одна из возможных электрических схем управляемого элемента на транзисторах (фиг. 2) содержит транзисторы 13 w. 14 w. резистор 15. Базы и коллекторы транзисторов соединены соответственно между собой, эмиттеры подключены к выводам фазирующего резистора 6, а общие коллекторная и базовая точки соответственно через ограничительный резистор и непосредственно соединены с выходом фазочувствительного выпрямителя //.
Выпрямитель может быть выполнен по одной из пзвестны.к схем. Его опорное напряжение Lon сдвинуто па 90° относительно напряжения сети Uc. В результате этого синфазная составляющая сигнала U не пропускается, а его квадратурная помеха после выпрямления поступает на вход управляемого элемента 12, который автоматически согласует фазы суммп зуел1ых напряжений. Сопротивление фазирующего резистора 6 и режим работы транзисторов 13, 14 выбирают таким образом, чтобы в процессе работы следящей системы фаза отрабатывающего напряжения изменялась в заданном диапазоне значений И и f/o (U-jt и УО - задающее и отрабатывающее напряжения). Если угол сдвига между напряжениями Из и Но 180°, то в согласованном состоянии следящей системы квадратурная но.меха, обусловленная сдвигом фаз, равна нулю, а синфазная составляющая сигнала и квадратурная помеха, обусловленная остаточными напряжениями задающего (СКВТ) 7 и отрабатывающего (ЛВТ) 8 трансформаторов, взаимно компенсируются. Вследствие этого напряжение на выходе ФЧВ // равно нулю, сопротивление управляемого элемента 12 максимально и ошибка следящей системы минимальна. В процессе работы следящей системы угол сдвига фаз между суммируемыми напряжениями меняется и оказывается отличным от 180°. В результате на входе усилительно-преобразовательного блока и регулятора фазы кроме синфазной составляющей сигнала появляется квадратурная помеха, которая, пройдя через выпрямитель 11, ъ виде выпрямленного напряжения поступает на базы транзисторов 13, 14. В результате этого сопротивление последних изменяется так, что фаза между суммируемыми напряжениями оказывается равной 180°. Таким образом автоматический регулятор фазы исключает возмол :ность отказа в работе следящей системы из-за наличия на входе усилителя помехи и обеспечивает ее работу с минимальной ошибкой, определяемой только моментной составляющей.
Предмет изобретения
1.Следящая система с согласованием фаз суммируемых входных напряжений, содержащая решающий блок в виде последовательно соединенных фазирующего резистора, линейного, масщтабного и синусно-косинусного вращающихся трансформаторов причем выход решающего блока через усилительно-преобразовательный блок подключен к управляющей обмотке исполнительного двигателя, вал которого через редуктор кинематически соединен с ротором линейного вращающегося трансформатора, отличающаяся тем, что, с целью цовышения точности работы системы, она содержит автоматический регулятор фазы в виде последовательно соединенных усилителя напряжения, фазочувствительного выпрямителя и управляемого элемента, причем вход усилителя напряжения соединен со входом усилительно-преобразовательного блока, а выход управляемого элемента подключен к фазируюп ему резистору.
2.Следящая система по п. 1, отличающаяся тем, что управляемый элемент выполнен на
двух транзисторах, базы и коллекторы которых соединены соответственно между собой, эмиттеры подключены к выходу управляемого элемента, а общие коллекторная и базовая точки соответственно через ограничительный резистор и непосредственно соединены со входом управляемого элемента.
ЪхоВ
13
иг.1 Чя
-S
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОЧУВСТВИТЕЛЬНЫЙ УСИЛИТЕЛЬ | 1973 |
|
SU399824A1 |
| БЕСКОНТАКТНЫЙ ДИСКРЕТНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙСТРУКТУРОЙ | 1970 |
|
SU262219A1 |
| Устройство компенсации помех (его варианты) | 1982 |
|
SU1096604A1 |
| УСТРОЙСТВО для САМОНАСТРОЙКИ ПАРАМЕТРОВ-- ^* | 1971 |
|
SU306447A1 |
| Следящий стабилизатор источник питания | 1976 |
|
SU605204A1 |
| Следящая система с комбинированным управлением | 1983 |
|
SU1136106A2 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| УСТРОЙСТВО для ПОДАВЛЕНИЯ КВАДРАТУРНОЙ ПОМЕХИ | 1973 |
|
SU364922A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |