00
0:)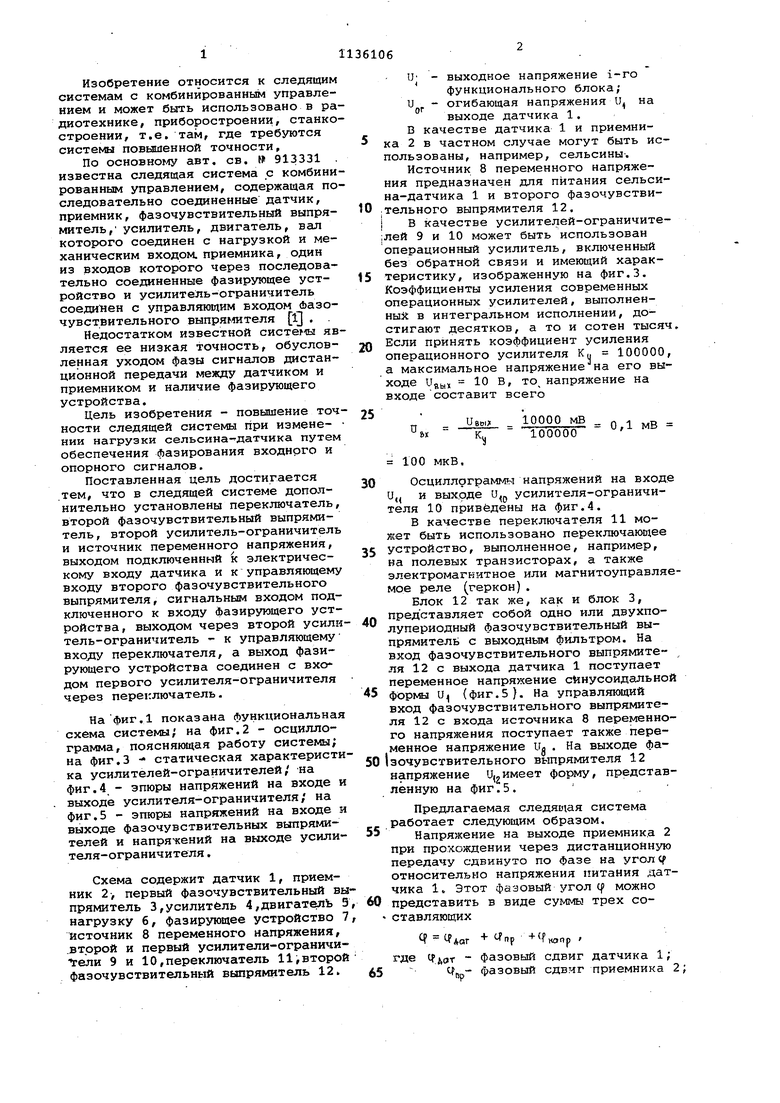
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1977 |
|
SU622044A1 |
| Следящая система с комбинированным управлением | 1984 |
|
SU1236419A1 |
| Синхронно-следящая система | 1956 |
|
SU119566A1 |
| ФАЗОЧУВСТВИТЕЛЬНЫЙ УСИЛИТЕЛЬ | 1973 |
|
SU399824A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326546A1 |
| Устройство для дистанционной передачи углового перемещения | 1981 |
|
SU1001148A1 |
| Устройство для контроля сельсин-приемников | 1973 |
|
SU456258A1 |
СЛЕДЯЩАЯ СИСТЕМА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ по авт, св. № 913331, отличающая, ся тем, что, с целью повышения точности системы, в ней дополнительно установлены переключатель, второй фазочувствительный выпрямитель, второй усилитель-ограничитель и источник переменного напряжения, выходом подключенный к электрическому входу датчика и управляющему входу второго фазочувствительного выпрямителя, сигнальным входом подключенного к входу фазирующего устройства, а выходом через второй усилитель-ограничитель - к управляющему входу переключателя, а выход фазирующего устройства соед1 ен с входом первого усилифеля-органичителя через переключатель .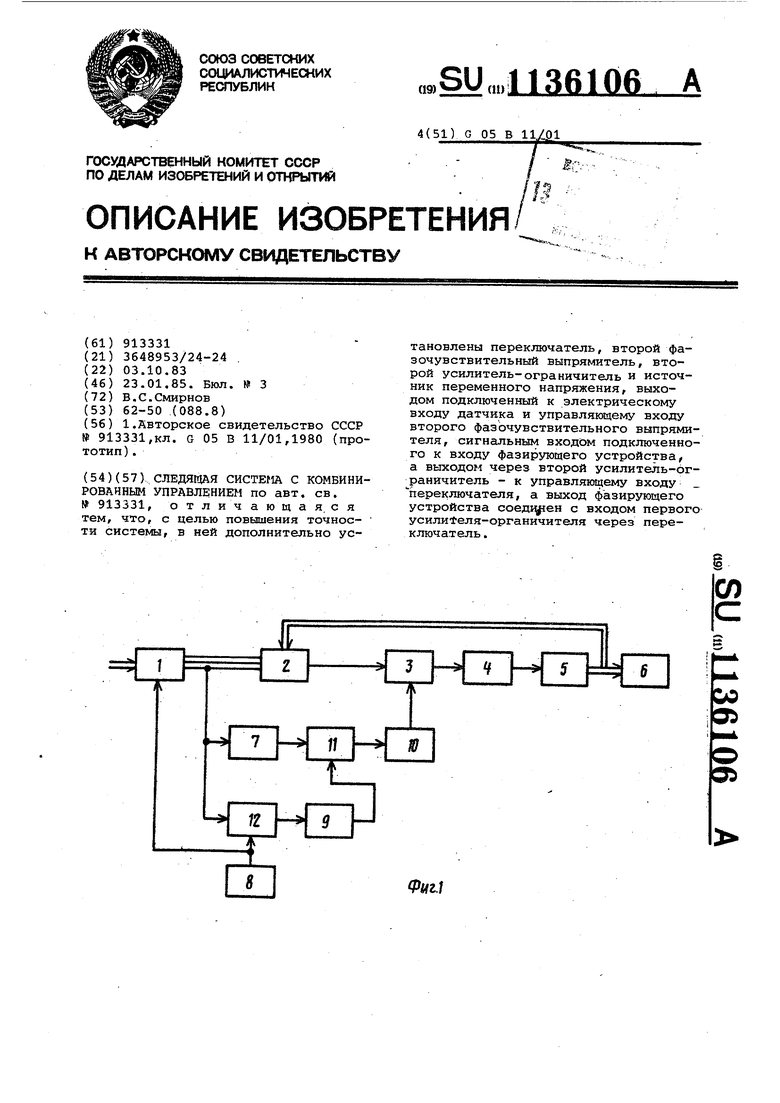
г
19 - а -I
12
л
Изобретение относится к следящим системам с комбинированным управлением и может быть использовано в радиотехнике, приборостроении, станкостроении, т.е. там, где требуются системы повышенной точности,
По основног/гу авт, св. № 913331 . известна следящая система с комбинированным управлением, содержащая последовательно соединенные датчик, приемник, фазочувствительный выпрямитель, усилитель, двигатель, вал которого соединен с нагрузкой и механическим входом, приемника, один из входов которого через последовательно соединенные фазирующее устройство и усилитель-ограничитель соединен с управляющим входом Фазочувствительного выпрямителя Г , .
Недостатком известной систе является ее низкая точность, обусловленная уходом фазы сигналов дистанционной передачи между датчиком и приемником и наличие фазирующего устройства.
Цель изобретения - повышение точности следящей системы при изменеНИИ нагрузки сельсина-датчика путем обеспечения фазирования входнрго и опорного сигналов.
Поставленная цель достигается .тем, что в следящей системе дополнительно установлены переключатель, второй фазочувствительный выпрямитель, второй усилитель-ограничитель и источник переменного напряжения, выходом подключенный к электрическому входу датчика и к управляющему входу второго фазочувствительного выпрямителя, сигнальным входом подключенного к входу фазирующего устройства, выходом через второй усилитель-ограничитель - к управляющему входу переключателя, а выход фазирующего устройства соединен с вхо дом первого усилителя-ограничителя через переключатель.
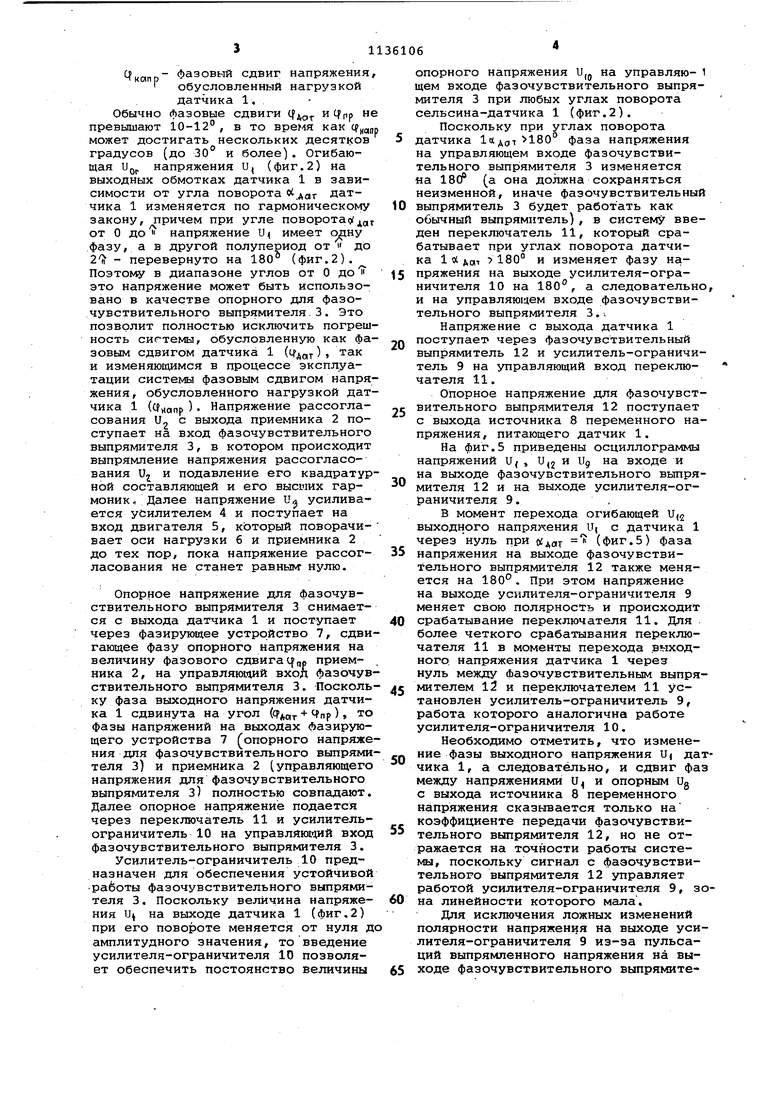
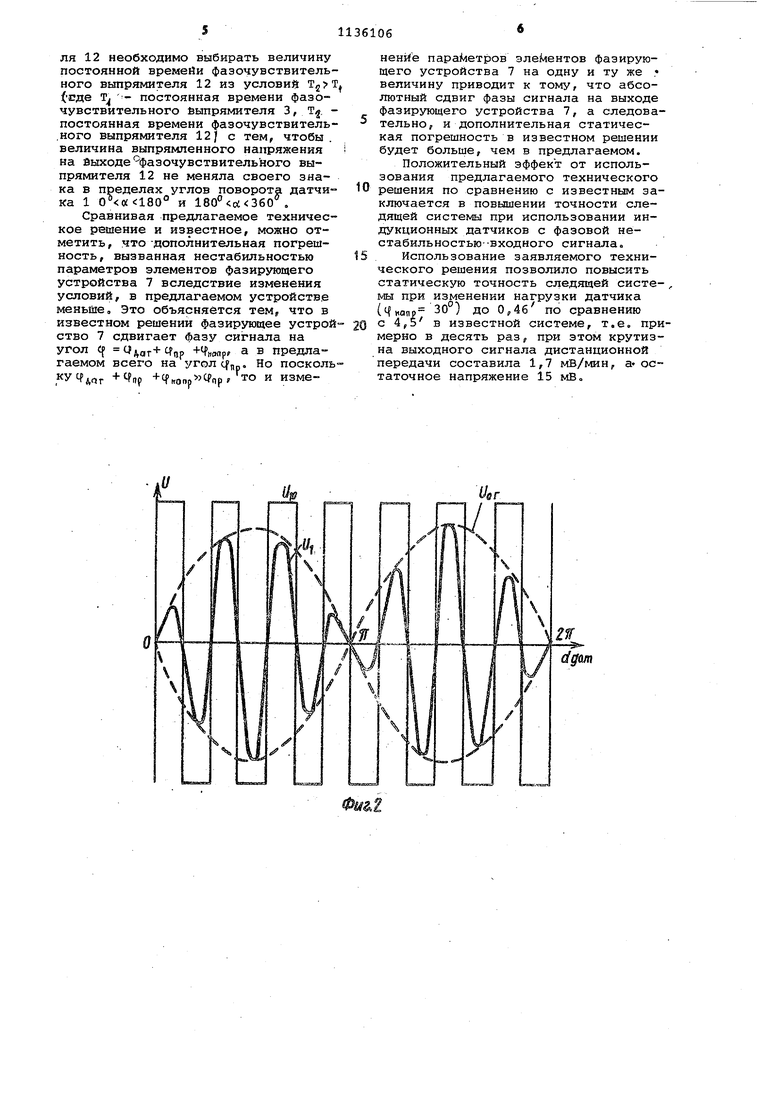
На фиг.1 показана функциональная схема системы; на фиг.2 - осциллограмма, поясняющая работу системы; на фиг.З - статическая характеристика усилителей-ограничителей/ на фиг.4 - эпюры напряжений на входе и выходе усилителя-ограничителя/ на фиг.5 - эпюры напряжений на входе и выходе фазочувствительных выпрямителей и напря-кений на выходе усилителя-ограничителя .
Схема содержит датчик 1, приемник 2, первый фазочувствительный выпрямитель 3,усилитель 4,двигатель 9 нагрузку 6, фазирующее устройство 7 источник 8 переменного напряжения, .второй и первый усилители-ограничи ели 9 и 10,переключатель 11,второй фазочувствительный выпрямитель 12.
U - выходное напряжение i-ro функционального блока;
и - огибающая напряжения U на выходе датчика 1.
В качестве датчика 1 и приемника 2 в частном случае могут быть использованы, например, сельсины.
Источник 8 переменного напряжения предназначен для питания сельсина-датчика 1 и второго фазочувстви;Тельного выпрямителя 12. I В качестве усилителей-ограничите|Лей 9 и 10 может быть использован операционный усилитель, включенный без обратной связи и имеющий характеристику, изображенную на фиг.З. Коэффициенты усиления современных операционных усилителей, выполненных в интегральном исполнении, достигают десятков, а то и сотен тысяч Если принять коэффициент усиления операционного усилителя Кц 100000, а максимальное напряжение на его выходе Ujbij 10 В, то напряжение на входе составит всего
Uwr 10000 мВ Г1 1 «тз К 100000 - 01 мВ ьк
100 мкВ.
Ocциллoгpaм /I напряжений на входе и„ и выходе усилителя-ограничителя 10 приведены на фиг.4.
В качестве переключателя 11 может быть использовано переключающее
устройство, выполненное, например, на полевых транзисторах, а также электромагнитное или магнитоуправляемое реле (геркон) .
Блок 12 так же, как и блок 3,
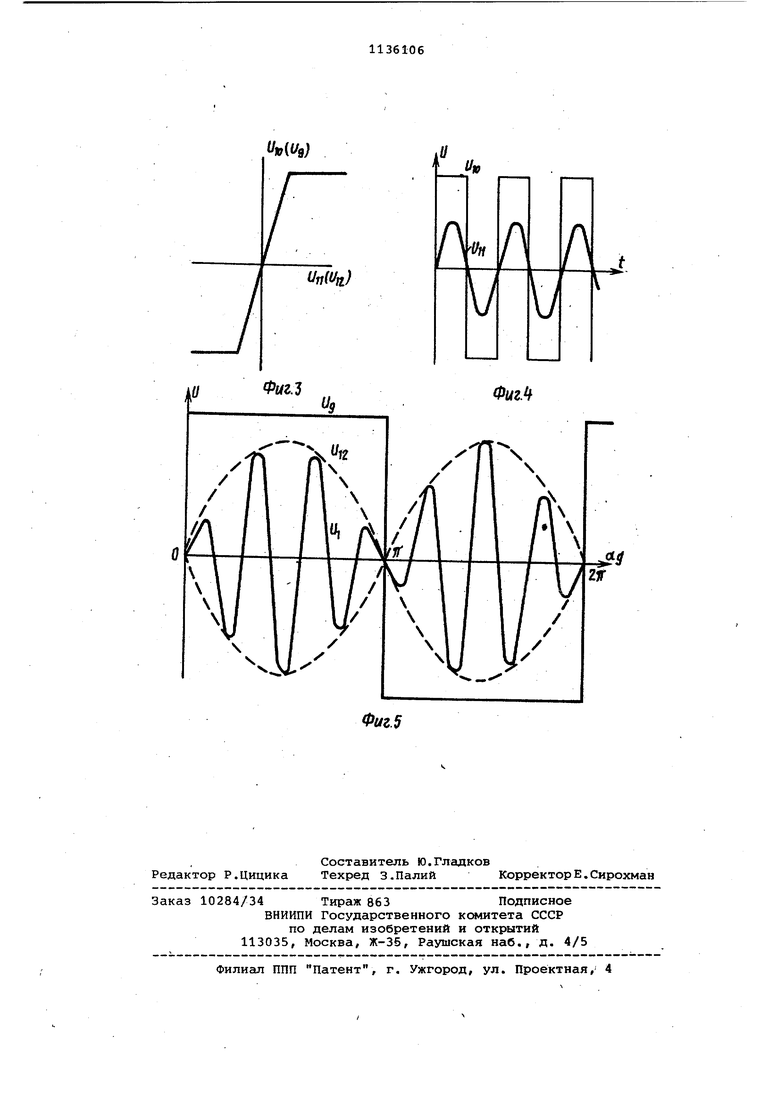
представляет собой одно или двухполупериодный фазочувствительный выпрямитель с выходным фильтром. На вход фазочувствительного выпрямителя 12 с выхода датчика 1 поступает переменное напряжение синусоидальной
формы и {фиг.5). На управляющий вход фазочувствительного выпрямителя 12 с входа источника 8 переменного напряжения поступает также переменное напряжение и. . На выходе фазочувствительного выпрямителя 12
напряжение Ц,имеет форму, представленную на фиг.5.
Предлагаемая следящая система работает следующим образом. Напряжение на выходе приемника 2 при прохождении через дистанционную передачу сдвинуто по фазе на угол f относительно напряжения питания датчика 1. Этот фазовый угол (f можно представить в виде суммы трех составляющих
/,ог + пр где Cfj,c,T - фазовый сдвиг датчика 1; ЧПР фазовый сдвиг приемника 2; - фазовый сдвиг напряжения обусловленный нагрузкой датчика 1, Обычно фазовые сдвиги (f, не превышают 10-12° , в то время как q, может достигать нескольких десятков градусов (до 30° и более). Огибающая UQP напряжения и, (фиг. 2) на выходных обмотках датчика 1 в зависимости от угла поворота в .дат Датчика 1 изменяется по гармоническому закону, причем при угле поворотао дт от О до || напряжение U имеет сшну фазу, а в другой полупериод от к до 2 - перевернуто на 180° (фиг.2), Поэтому в диапазоне углов от О доif это напряжение может быть использовано в качестве опорного для фазочувствительного выпрямителя.3. Это позволит полностью исключить погрешность сигтемы, обусловленную как фазовым сдвигом датчика 1 ( так и изменяющимся в процессе эксплуатации системы фазовым сдвигом напряжения, обусловленного нагрузкой датчика 1 (Cfjianp ). Напряжение рассогласования и„ с выхода приемника 2 поступает на вход фазочувствительного выпрямителя 3, в котором происходит выпрямление напряжения рассогласования и и подавление его квадратур ной составляющей и его высших гарМОНИК. Далее напряжение и усиливается усилителем 4 и поступает на вход двигателя 5, который поворачивает оси нагрузки 6 и приемника 2 до тех пор, пока напряжение рассогласования не станет равным нулю. Опорное напряжение для фазочувствительного выпрямителя 3 снимается с выхода датчика 1 и поступает через фазирующее устройство 7, сдви гающее фазу опорного напряжения на величину фазового сдвига tfqp приемника 2, на управляющий вход фазочув ствительного выпрямителя 3. Посколь ку фаза выходного напряжения датчика 1 сдвинута на угол ( + 1пр ), то фазы напряжений на выходах базирующего устройства 7 (опорного напряже ния для фазочувствительного выпрями теля З) и приемника 2 (управляющего напряжения для фазочувствительного выпрямителя З) полностью совпадают. Далее опорное напряжение подается через переключатель 11 и усилительограничитель 10 на управляющий вход фазочувствительного выпрямителя 3. Усилитель-ограничитель 10 предназначен для обеспечения устойчивой работы фазочувствительного вьтрямителя 3. Поскольку величина напряжения и на выходе датчика 1 (фиг.2) при его повороте меняется от нуля д амплитудного значения, то введение усилителя-ограничителя 10 позволяет обеспечить постоянство величины :«л опорного напряжения U,j на управляю- 1 щем входе фазочувствительного выпрямителя 3 при любых углах поворота сельсина-датчика 1 (фиг.2). Поскольку при углах поворота датчика фаза напряжения на управляющем входе фазочувствительного выпрямителя 3 изменяется на 18СР (а она должна сохраняться неизменной, иначе фазочувствительный выпрямитель 3 будет работать как обычный выпрямитель), в систему введен переключатель 11, который срабатывает при углах поворота датчика 1 л o| 7180° и изменяет фазу напряжения на выходе усилителя-ограничителя 10 на ISO, а следовательно, и на управляющем входе фазочувствительного выпрямителя 3.. Напряжение с выхода датчика 1 поступает через фазочувствительный выпрямитель 12 и усилитель-ограничитель 9 на управляющий вход переключателя 11. Опорное напряжение для фазочувствительного выпрямителя 12 поступает с выхода источника 8 переменного напряжения, питающего датчик 1. На фиг.5 приведены осциллограммы напряжений Uj , и,2 и Ug на входе и на выходе фазочувствительного выпрямителя 12 и на выходе усилителя-ограничителя 9. , В момент перехода огибающей выходного напряжения Uj с датчика 1 через нуль при « (фиг.5) фаза напряжения на выходе фазочувствительного выпрямителя 12 также меняется на 180. При этом напряжение на выходе усилителя-ограничителя 9 меняет свою полярность и происходит срабатывание переключателя 11. Для более четкого срабатывания переключателя 11 в моменты перехода выходного, напряжения датчика 1 через нуль между фаэочувствительным выпрямителем 12 и переключателем 11 установлен усилитель-ограничитель 9, работа которого аналогична работе усилителя-ограничителя 10. Необходимо отметить, что изменение фазы выходного напряжения U) датчика 1, а следовательно, и сдвиг фаз между напряжениями и и опорным Ug с выхода источника 8 переменного напряжения сказывается только на коэффициенте передачи фазочувствительного выпрямителя 12, но не отражается на точности работы системы, поскольку сигнс1л с фааочувствительноро выпрямителя 12 управляет работой усилителя-ограничителя 9, зона линейности которого мала. Для исключения ложных изменений полярности напряжения на выходе усилителя-ограничителя 9 из-за пульсаций выпрямленного напряжения на выходе фазочувствительного выпрямителя 12 необходимо выбирать величину постоянной времейи фаэочувствительного выпрямителя 12 из условий TjjT (еде Т - постоянная времени фазочувствительного выпрямителя 3, т, постоянная времени фазочувствитель,ного выпрямителя 12) с тем, чтобы . величина выпрямленного напряжения на йыходе %аэочувствительного выпрямителя 12 не меняла своего знака в пределах углов поворота датчика 1 0( и ,
Сравнивая предлагаемое техническое решение и известное, можно отметить , что -дополнительная погрешность, вызванная нестабильностью параметров элементов фазирующего устройства 7 вследствие изменения условий, в предлагаемом устройстве меньше. Это объясняется тем, что в известном решении фазирукядее устройство 7 сдвигает фазу сигнала на угол с .+ cTnp +Ч„отр а в предлагаемом всего на угол tf , Но поскольKyt Aor +frip то и измененйё параметров элементов фазирующего устройства 7 на одну и ту же « величину приводит к тому, что абсолютный сдвиг фазы сигнала на выходе фазирующего устройства 7, а следовательно, и дополнительная статическая погрешность в известном решении будет больше, чем в предлагаемом.
Положительный эффект от использования предлагаемого технического решения по сравнению с известным заключается в повышении точности следящей системы при использовании индукционных датчиков с фазовой нестабильностью-входного сигнала.
Использование заявляемого технического решения позволило повысить статическую точность следящей системы при изменении нагрузки датчика (Ч налр- 30°) до 0,4б по сравнению с 4,5 в известной системе, т.е. примерно в десять раз, при этом крутизна выходного сигнала дистанционной передачи составила 1,7 мВ/мин, а-остаточное напряжение 15 мВ«
а
Ulo(Ug)
| l.SBTOpcKoe свидетельство СССР № 913331,кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
