Данный регулятор предназначен для управления объектами с меняющимся или неизз аенНым запаздыванием.
Известны бесконтактные дискретные регуляторы с переменной структурой, содержащие измерительную следящую систему с двигателем постоянной скорости, выходной трансформатор усилителя сигнала ощябки с тремя выходнымИ обмотками, фазочувствительный -выпрямитель с двумя схемами совладения и выходным трехпозиционным реле, управляющим силовым двигателем.
Недостатком известных устройств является невысокое качество регулир овапия.
Предлол енное устройство отличается от известных тем, что в нем установлены схема умножения на транзисторе, питаемом через выпрямительный мост от первой выходной обмотки выходного трансформатора, базовый и эмиттерный электроды которого .нодсоединены ко второй обмотке управления двигателя постоянной скоросзИ, и частотно-импульсный модулятор с выпрямителем и усилителем, подсоединенным ко второй обмотке выходного трансформатора, а третья выходная обмотка выходного трансформатора подсоединена ко входу фазочувствительного выпрямителя, причем вторые входы схем совпадения подсоединены к выходу частотного модулятора.
Это позволяет упростить устройство и повысить качество регулирования.
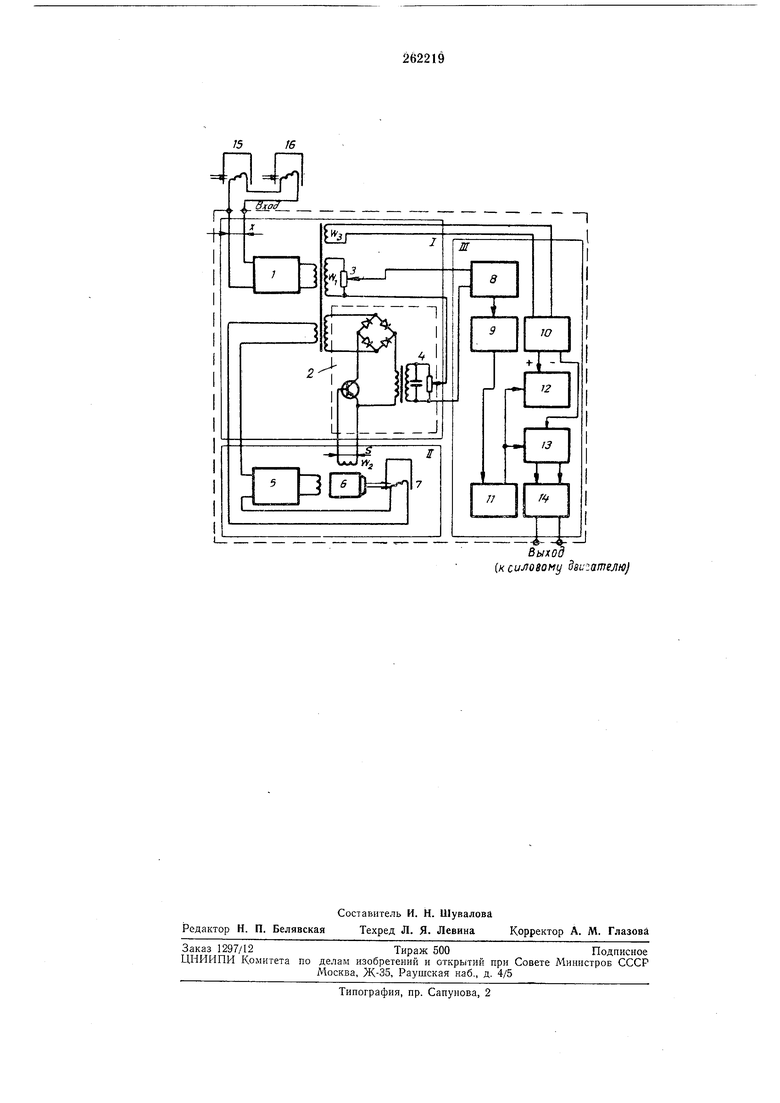
На чертеже представлен бесконтактный регулятор с переменной структурой. 5 В состав регулятора входят: логическое переключающее устройство 1, содержащее усилитель / с трансфорлМаториым выходом, схему умножения 2 и элементы «астройки 3 и 4; следящая система //, состоящая из усилителя 5, 0 конденсаторного двигателя 6 с двумя управляющими об1мотками и ферродинамического преобразователя 7; и выходное устройство ///, в котором имеются следующие блоки: усилитель 8, выпрямитель 9, фазочувствительный выпря5 митель 10, частотно-импульсный модулятор И, две схемы совпадения 12 и 13 и трехпозиционное реле 14.
Работа регулятор а. Сигнал с ферродинам.ических преобразователей параметра 15 0 и задания 16 поступает на вход усилителя /, с выходной обмотки W которого снимается сигнал:
г/1 /С,х.(1)
5 Коэффициент Ki устанавливается при помощи переменного сопротивления 3, включенного па обмотку Wi. чесхве выходной обметки следящей системы //. С обмотки Wz снимается сигнал, представляющий собой функцию переключения S. Этот сигнал снимается только ири вращении двигателя, фаза его определяется направлеБием вращения двигателя, а амплитуда неизменна, так как режим работы двигателя выбран таким, что он вращается с постоянной скоростью. Схема умножения 2 логического переключающего устройства производит вычисление величины y2 K2|A-|sign5.(2) Здесь модуль сигнала ощибки |д;| получается в результате выпрямления «алряжеяия частотой 50 гц, пропорционального сигналу ощибки. Этим выпрямленным (пульсирующим) напряжением частотой 100 гц питается транзистор схемы умножения. На базу его подается напряжение, пропорциональное S, фаза которого определяет знак величины 5. В результате С выходного трансформатора схемы умножения снимается напряжение, нропорциональное величине |x|signS. , Коэффициент Ха устанавливается при помощи сопротивления 4. На усилитель 8 поступает напряжение y / iX-f/C2|.x-|signS. Частотно-импульсный модулятор формирует импульсы; частота .их следования определяется величиной напряжения постоянного тока, которое формируется выпрямителем 9. Период следования импульсов частотно-импульсного модулятора определяется выражениемР(х„)Т, Г„„„ при 1х„ 5 С,(4) где Т - период следования импульсов; п - порядковый номер периода; ijj - крутизна преобразования частт-но-импульсного модулятора; f(n) - функциональная зависимость периода следования импульсов от сигнала ошибки (может быть экспонен ци а л ын о и, логарифмической или др.); мин - минимальный период следования импульсов; X - сигнал ошибки; С - порог насыщения частотно-импульсного модулятора. Выражение (3) соответствует операции переключения крутизны преобразования частотноимпульсного модулятора по следующему закону ,,, I а при , 1 р при .(5) Здесь Коэффициенты аир определяются следующими соотнощениямИ + K2, p /Ci-/C2.(6) Выходной импульс формируется трехпозиционным реле 14. Знак импульса определяется фазой сигнала ощибки. Происходит это следующим образом. Усиленный сигнал ошибки поступает с обмотки Ws на фазочувствительный выпрямитель 10, который формирует в зависимости от фазы сигнала ощибки положительное или отрицательное напряжение. Это напряжение поступает на трехпозиционное реле только В течение отрезка времени, равного длительности импульса частотно-имульоного модулятора. Предмет изобретения Бесконтактный дискретный регулятор с переменной структурой, содержащий измерительную следящую систему с двигателем постоянной скорости, выходной трансформатор усилителя сигнала ошибки с тремя выходными обмотками, фазочувствительный выпрямитель с двумя схемами совпадения и выходным трехпозиционным реле, управляющим силовым двигателем, отличающийся тем, что, с целью упрощения регулятора ори повышении качества регулирования, в нем установлены схема умножения на транзисторе, питаемом через выпрямительный мост от первой выходной обмотки выходного трансформатора, базовый и эмиттерный электроды Которого подсоединены ко второй обмотке управления двигателя постоянной скорости, и частотио-импульаньш модулятор с выпрямителем и усилителем, подсоединенным ко второй обмотке выходного трансформатора, а третья выходная обмотка выходного трансформатора подсоединена ко входу фазочувстви1елвного выпрямт1теля, причем вторые входы схем совпадения подсоединены к .выходу частотного модулятора.
/5f6
rLJT
Выкос (кси- оаому Звигателю)
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор постоянного напряжения | 1977 |
|
SU661528A1 |
| РЕГУЛЯТОР С ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫМ ВОЗДЕЙСТВИЕМ | 1966 |
|
SU186548A1 |
| Следящая система | 1972 |
|
SU470784A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ПРИВОД ПОСТОЯННОГО ТОКА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU435501A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| ИМИТАТОР СИСТЕМЫ СОПРОВОЖДЕНИЯ | 1978 |
|
SU1840907A1 |
| Цифро-аналоговая следящая система | 1976 |
|
SU593187A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |