УСТРОЙСТВО для ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ
Изобретение относится к области измерений неэлектрических величин электрическими методами, в частности к устройствам для измерения перемещений, содержащим индуктивные датчики с подвижным ферромагнитным сердечником.
Известны различные схемы включения индуктивных датчиков. Одной из наиболее распространенных является нуль-балансная схема, содержащая четыре индуктивных трансформаторных датчика с подвилсным сердечником, обмотки питания которых соединены последовательно.
Вторичная обмотка первого датчика соединена последовательно и встречно с вторичной обмоткой второго датчика, что обеспечивает вычитание выходных сигналов первого и второго датчиков, причем эти датчики имеют общий сердечник, образуя рабочий дифференциально-траисформаторпый датчик.
Вторичная обмотка третьего датчика соединена последовательно и встречно с вторичной обмоткой четвертого датчика, в результате чего происходит вычитание выходных сигналов третьего и четвертого датчиков, лричем эти датчики имеют общий сердечник, образуя уравновен1иваюп1ий дифференциально-трансформаторный датчик.
между собой и подключены к усилителю напряжения таким образом, что на в.ходе последнего образзется разность сигналов датчиков.
Выход усилителя Связан с реверсивным двигателем, который перемещает сердечник в уравновешивающе1М дифференциально-трансформаторном датчике до тех пор, пока разность сигналов на входе усилителя не станет
равной нулю. При этом положение сердечника в уравновешивающем дифференциально-трансфор.маторном датчике соответствует положению сердечника в рабочем датчике. В рабочем дифференциально-трансформаторном датчике первый и второй датч1ИСп выполняют по отношению друг к другу функции ко.мпенсации, в уравновешивающем датчике третий и четвертый датчики - также функции компенсационных датчиков. При этом в
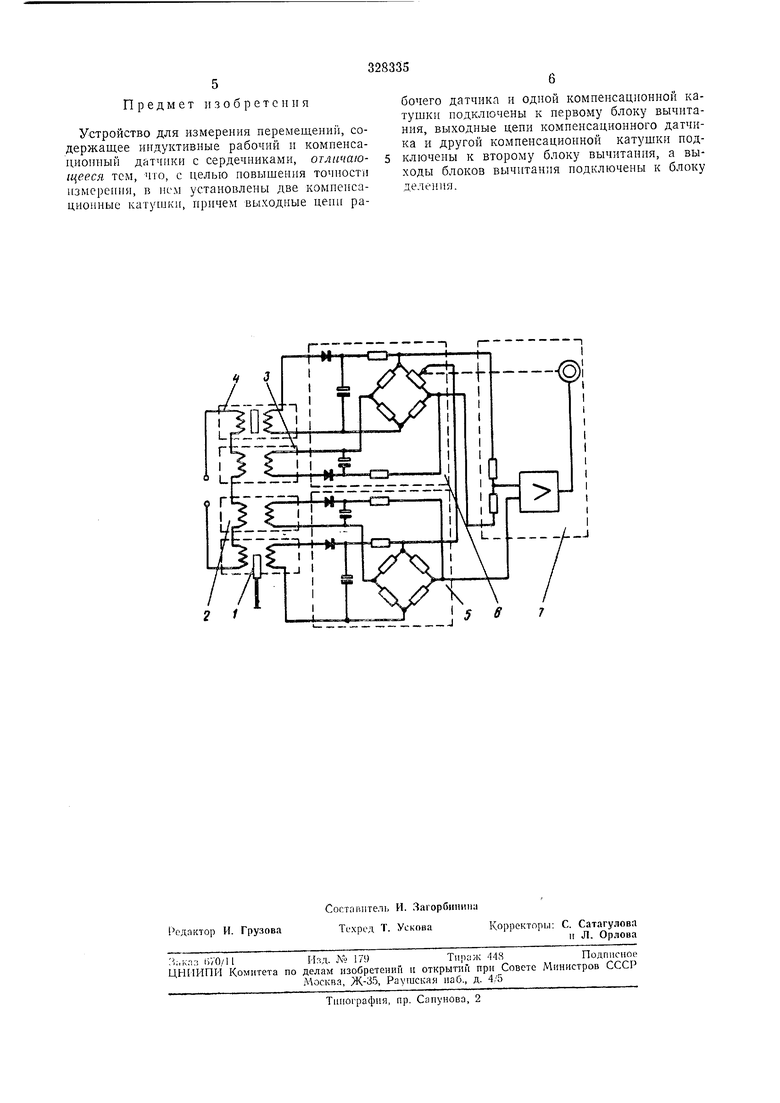
дифференциально-трансформаторных датчиках компенсируется составляющая погрешности от изменения активного сопротивления обмоток под влиянием внешних факторов. Паличие погрешности от изменения виешних факторов, действующих на рабочий дифференциально-трансформаторный датчик, в известных иуль-балансных схемах объясняется тем, что уравновешивающий дифференциально-трансформаторный датчик находится Расположить уравновешивающий датчик с вторичным прибором (усилителем, реверсивным двигателем и т. д.) рядом с рабочим часто не представляется возможным при ограниченных габаритах и недоступности объекта измерения (например, в каналах атомного реактора). Возможность измерения быстропротекающих процессов в таких схемах ограничена, что Связано с временем отработкн вторичным прибором положения сердечника в уравновсшнвающем датчике. Целью изобретения является новыишние наделсности и точности измерений ие1)еме дени11 при воздействии различных внешних факторов. Это достигается тем, что в измерительную схему, кроме рабочего и компенсационного датчиков с сердечниками,введены два компеис ационных датчика без сердечников, причем выходные цепи рабочего датчика и комнеисащюцного датчика без сердеч 1ика :подключены . блоку вычитания, выходные цепи компенсадионного датчика с сердечником и Компеисационного датчика иез сердечнпр а - второму .-блоку.-вычитания, а выходы обоих блоков вычитания нодсоединены к блоку деления, при этол компеисационный датчик имеет пеподвижиый сердечпик. Рабочий и ком пенсацио-нный датчики расположены в месте измерения перемещения, а вторичиый прибор (блоки вычнтаиия и делепия) может быть вынесен на любое расстояние.. Благодаря такому выполнению устройства выходная .величина 1змер11тельной схемы пропорциональна только, нзмеряемому перемен ению, не зависит от величины активиого и iniдуктивиого сопротивления обмоток датчиков, и является только функцией относительного положения иодвижного и неподвилсного сердечников рабочего и компенсационного датчиков. На чертеже показана принциппальная схема устройства. Устройство включает D себя: рабочий длтЧ1п / с сердечником; компенсационные датчики 2 II 3 без сердечника; компеисационный датчик 4 с пеиодвижпым сердечником; блоки 5 п 6 вычитания; блок 7 деления. Работает устройство следующим образом. Выходной сигнал от рабочего датчика / и сигнал от компенсационного датчика 2 без сердечника иостунают иа блок 5 вычигання. Сигнал от комнеисационного датчика } с иеподвижным сердечником и сигнал от второго компенсациоиного датчика 3 без сердечника подаются иа блок 6 вычитания. / и компеисационным датчт ом 2 без сердечника к разности сигналов между компенсационным датчиком 4 с неподвижным сердечником и ком-пенсационным датчиком . без сердечпика. Па рабочий датчик действует измеряемое 11еремеи1.еиие и виеппшй фактор, па комнеисационные - только виеиший фактор. Датчики питаются от одиого источника (первичные обмотки датчиков соедипешл |носледовательио), при этом компенсируется погрепнюсть от изменения напряжения иитаиия. Когда все датчики идентичны по геометрическим размерам п параметрам обмоток, при вычитаиип сигиалов происходит взаимная компенсация составляющих , иропорциональиых активному и индуктивному сопротиплеппю обмоток катушек без сердечников, а ири делении разпостпых сигналов - взаимная компенсация составляюи,пх сигпала, пропорциональных индуктивному сонротнвленню обмоток, завнсяи1,ему от магн1ггной нроницаемости сердечников. Выходной снгнал устройства при этом пропорциоиалеи только отношеиию геометрических величин положения подвижного и неподвижного сердечников в катушках. Первичные обмотки рабочего датчика, компеисацчоппых датчиков без сердечников, комиеисациоииого датч1 ка с ненодвижным сердечннком (устанавливаемых в месте измереиия перемещений) соедииены гюследовательио. Вторичные обмотки датчиков присоединены, cooTiteTCTBCHHo к блокам вычитания. В качестве блоков вычитания использованы симметричиые мостовые с.чемы с активными илечами. Ири иодаче иа диагонали моста двух сигиалов с одиого из плеч снимается иапряжение, цропорциональное разности этих с 1гналов. Сигналы от датчиков иредварительно выпрямляются, так как, во-первых, измерение отношения сигналов проще производить иа постоянном токе, во-вторых, исключается погрешность от сдвига (j)a3 между сигналами датчиков, и, в-третьих, происходит взаимная развязка обмоток датчиков. Операция деления осуществляется нрп цомощи блока делепия в виде логометра постояииого тока, вынолпениого па базе электронного нотенц шметра ЭГ1П-09. Иа реохорд потенциометра нодается разностный сигнал с одного моста (реохорд используется непосредстпенно как одно из нлеч моста), а на движок реохорда поступает разностный сигнал с другого моста. Положение движка иа реохорде (т. е. отсчет по шкале ирибора) ироиорциоиальпо отПредмет из обретения
Устройство для измерения перемещений, содержаш;ее индуктивные рабочий и компенсационный датчики с сердечниками, отличающееся тем, чго, с целью новышения точности измерения, в нем установлены две компенсационные катушки, нричем выходные цени рабочего датчика и одной комненсационной катушки подключены к первому блоку вычитания, выходные цепи компенсационного датчика и другой компенсационной катушки подключеиы к второму блоку вычитания, а выходы блоков вычитания нодключены к блоку деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Трансформаторный мост для измерения взаимной индуктивности | 1989 |
|
SU1721523A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДИФФЕРЕНЦИАЛЬНО-ТРАНСФОРМАТОРНЫХ | 1970 |
|
SU270878A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1428935A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1972 |
|
SU341064A1 |
| МАГНИТОУПРУГИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ИЗМЕРЕНИЙ УСИЛИЙ | 1966 |
|
SU184751A1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Поплавковый плотномер жидкости | 1983 |
|
SU1182334A1 |
| Датчик перемещений с частотным выходом | 1983 |
|
SU1155842A1 |
.L ..
