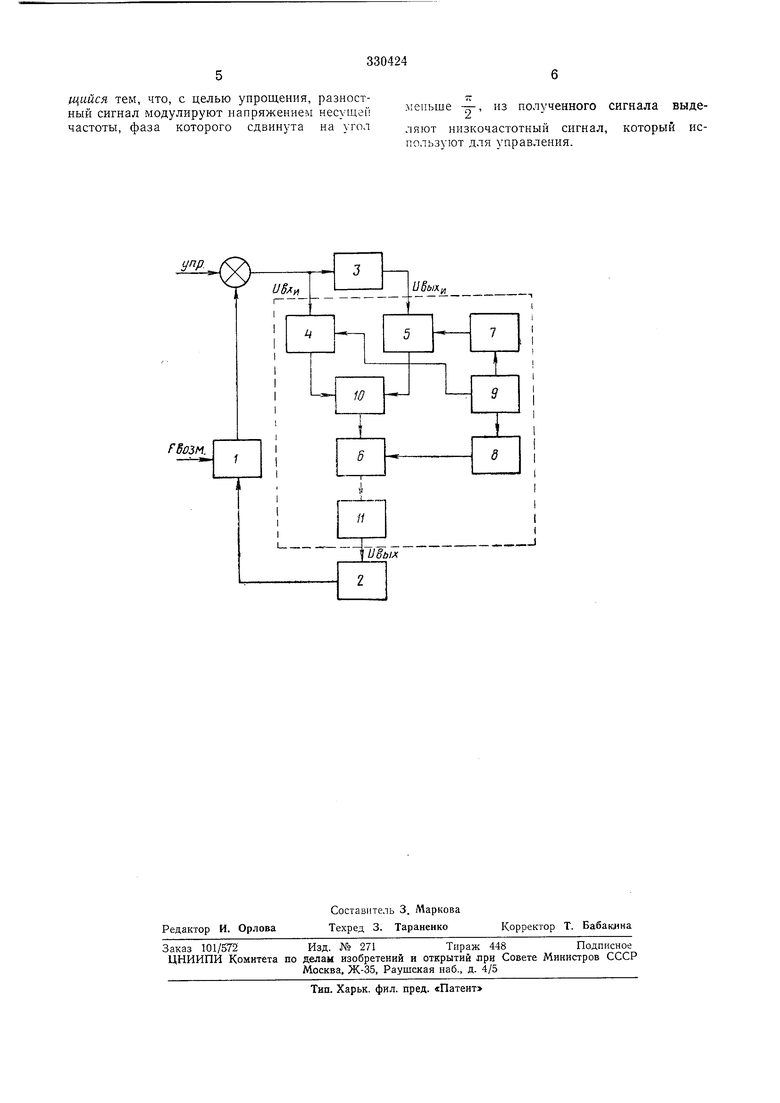
Изобретение относится к способам коррекции систем автоматического управления. Известен способ коррекции астатических систем автоматического управления, заключающийся в том, что входной и выходной сигналы корректируемого звена модулируют напряжениями несущей частоты, фазы которых сдвинуты на-, и формируют разностный сигнал. Цель изобретения - упроихение способа. Цель достигается тем, что по предлагаемому способу разностный сигнал модулируют напряжением несущей частоты, фаза которого сдвинута на угол меньше -, из полученного сигнала выделяют низкочастотный сигиал, который используют для управления. Пусть для упрощения входной сигнал интегрирующего корректируемого звена, например, системы автоматического управления, изменяется по гармоническому закону: Увхи t/o-sin2.(1) Тогда выражение для выходного сигнала интегрирующего звена корректируемой системы управления принимает вид: де Ln-амплитудное значение напряжения, fi -частота, t--время. Выражения для модулированных входноо и выходного сигналов интегрирующего вена с учетом сдвига модулирующего наряжения выходного сигнала по фазе на угол тс принимают вид: .ч 0 sir со„г - «Гсо8(шо - 9М - cos(co, о)Л , t BbijH.M - Y7COSl2 COSЮy/ - - I COS (со„ - 2}t Н- cos (соо де «о - частота источника напряжения несущей частоты (модулирующего напряжения). Сигнал, равный разности модулированных входного и выходного сигналов интегрирующего звена, описывается выражением t/Д (/вхИ.М - СвыхИМ t/of/1 /М 1 +gJ-cosK-2)i-(l--Q )Х Выражение для разностного сигнала, модулированного напряжением несущей частоты, сдвинутым по фазе на угол Фо, лежащий в интервале от О до Tf , можно записать еледующим образом: (br l).COS(a..-0) X COSfoj,, -;- 9.)t -Sll-(,,t + ) : f j(l-bo |-sin(12/ i-cfj-l 1-1) 1 lf/ 1 Xsin{2/-cp,,)j- 2-1(1 + jXsin(2c«,,-2)/-.-9o|-( Xsin(2a),-L) Из выражения (6) следует, что сигнал f/дд содержит низкочастотную составляющую с частотой - и высокочастотные составляющие с частотами ( - -О) и (2«о + ), так как при амплитудной модуляции обычно выбирается .MaKC, где макс - ВЫСШаЯ частота спектра входного сигнала. Поэтому после прохождения сигнала 6дм через фильтр нижних частот высокочастотные составляющие отфильтровываются, а выражение для сигнала, приходящего на исполнительное устройство системы управления, принимает вид: t/Bb..x %f ( 1 -г 4i) -sin (о ,- 9„) -г ( 1 L /V sin j/- cs,,) I . Используя формулу для суммы двух гармонических сигиалов с разными амплитудами и фазами, выражение (7) можно представить в виде: . f/вых () г (й)1 A(o 1 /1 - 2 1 1 + -о 1 - -о COS 2 (1 г 0-) :- (1 - ii) cos ; (8 1 j /I (l + 7)) (l -1 1-sin (c,) : -arctSf 7 ()-coscp + (l-yxcos(-cp i arctg -5-tgc J. ЧИ системы равен бескоиечиости, так как А (-) содержит М1 ожитель ° фазо-частотная характеристика ( (-) обладает опережением и изменяется от + до 0. Это более очевидно, если, например, принять(0):.K2( 9(j) arctg -j. Таким образом, предложенный способ оррекции астатических систем автоматического унравления сохраняет порядок астатизма системы и обеспечивает фазовую частотную характеристику с опережением, чем существенно расширяет область устойчивости и улучшает качество переходного процесса. На чертеже приведена блок-схема системы с коррекцией, являющейся одним из возможных вариантов реализации предлагаемого способа. Система содержит объект }Ч1равлення /; исполнительное устройство 2; интегрирующее звено 3; балансные модуляторы 4, 5, 6; фазовращатели 7, 8; источник 9 напряжения несущей частоты; вычнтатель 10: фильтр нижних частот У/. В.ходной 6вхи и выходной бпыхи И сигналь интегрирующего звена 3 поступают соответственно на входы балансных модуляторов 4 и 5. Напряжение {Унес от источника несущей частоты .9 подается на балансный .модулятор 4 непосредственно, а на балансный .модулятор 5 - через фазовращатель 7, который л сдвигает это напряже; не по фазе на угол -. На выходах балансных модуляторов 4 и 5 возникают .модулированиые сигналы, которые иодаротся на входы вычитателя JO. Выходной сигнал вычитателя поступает на вход балансного модулятора 6, к которо.му напряжение от источника несуплей частоты подводится через фазовращатель 8. Выходной сигнал балансного модулятора 6 проходит через фильтр нижних частот и поступает на исполнительное устройство системы управления, которое воздействует на объект управления. Предмет изобретения Способ коррекции астатических снстем автоматического управления, заключающийся в том, что входной и выходной сигналы корректируемого звен-а, например интегрирующего, модулируют напряжениями несущей частоты, фазы которых сдвинуты на и формируют разностный сигнал, отличающийся тем, что, с целью упрощения, разностный сигнал модулируют напряжением несущей частоты, фаза которого сдвинута на угол
на полученного сигнала выдеменьше
2
ляют низкочастотный сигнал, который используют для управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU287159A1 |
| УСИЛИТЕЛЬ С РЕГУЛИРУЕМЫМ КОЭФФИЦИЕНТОМУСИЛЕНИЯ | 1972 |
|
SU353335A1 |
| СИСТЕМА СТЕРЕОФОНИЧЕСКОГО ВЕЩАНИЯ | 1992 |
|
RU2040859C1 |
| ЯСЕСОЮЗК..,, | 1973 |
|
SU370704A1 |
| СПОСОБ СОЗДАНИЯ ДВУХЧАСТОТНОЙ ПОМЕХИ | 2012 |
|
RU2486536C1 |
| Анализатор СВЧ-цепей | 1989 |
|
SU1659904A1 |
| Способ определения резонанса измерительной цепи и устройство для его осуществления | 1990 |
|
SU1725161A1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| Устройство для измерения параметров ФАР | 1990 |
|
SU1756838A1 |
| СПОСОБ ФАЗИРОВАНИЯ РАДИОСИГНАЛОВ | 2012 |
|
RU2489729C1 |
У/7/
ГВозм.
