Изобретение относится к радиотехнике и может быть использовано в радиолокации.
Известен способ формирования помехи, основанный на излучении набора различных частот, комбинация которых в результате воздействия на нелинейность приемника радиолокационной станции (РЛС) оказывается в полосе его пропускания. Такая помеха может вызвать перегрузку приемника, насыщение видеотракта или даже дезинформацию оператора. Помехи этого вида иногда называют интермодуляционными, так как при их действии возникают интермодуляционные (побочные) каналы приема (Защита от радиопомех. Под ред. М.В.Максимова, М. Соврадио, 1976 [1]). В функциональном плане такие помехи обычно используются в режиме обзора радиолокационной обстановки, где препятствуют распознаванию истинной цели. После выделения полезного сигнала цели РЛС входит в режим слежения, когда действие помехи становится неэффективным.
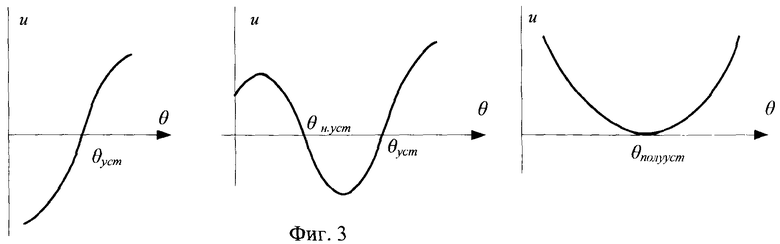
Наиболее близким к предлагаемому решению является способ создания помехи, основанный на формировании двухчастотного сигнала (А.И.Леонов, К.И.Фомичев. Моноимпульсная радиолокация. М. Радио и связь, 1984 [2]). Двухчастотная помеха призвана исказить пеленгационную характеристику (ПХ) угломерного координатора РЛС таким образом, чтобы сделать невозможным сопровождение цели и в конечном счете обеспечить срыв слежения. При отсутствии помехи, то-есть в нормальном состоянии, ПХ описывается вблизи нуля нечетной функцией, при этом система отслеживает устойчивый нуль этой характеристики. В идеальном случае при эффективном действии помехи ПХ становится четной, устойчивый нуль исчезает и преобразуется в полуустойчивый, причем крутизна характеристики в равносигнальном направлении существенно падает. Это предопределяет тенденцию к срыву слежения.
Недостатком известного способа является низкая вероятность срыва слежения, что выражается в сохранении в ПХ устойчивых нулей, которые захватываются следящей системой угломера, при этом сохраняется сопровождение цели. Среди неблагоприятных факторов, способствующих этому, следует отметить наличие отраженного сигнала, гетеродинирование одной из составляющих двухчастотного сигнала или их гармоник, что приводит к появлению устойчивых нулей в ПХ и самоподсвету цели. Однако наибольшее влияние на снижение эффективности известного решения оказывает игнорирование реальных характеристик нелинейных приборов, преобразующих биения двухчастотного сигнала в колебание разностной частоты. Такими приборами являются смесительные диоды приемника РЛС. Учитываются только четные члены детекторной характеристики этих приборов, хотя в широком поле параметров помехи важную роль играют не только четные, но и нечетные их составляющие. Именно последние и являются причиной появления в ПХ устойчивых нулей.
Технический результат предлагаемого решения состоит в повышении вероятности срыва слежения угломерного координатора РЛС при расширении области изменения параметров помеховых сигналов.
Этот результат достигается тем, что принятые от РЛС колебания разветвляют на три составляющих, генерируют напряжение переменной частоты, модулируют первую составляющую разветвленного колебания по фазе полученным напряжением, при этом меняют частоту первой составляющей в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, из промодулированных колебаний формируют первую компоненту двухчастотного сигнала путем сдвига по частоте на величину δ, удовлетворяющую неравенству 
Для получения нужного эффекта следует так изменить двухчастотный сигнал, чтобы при прямом его детектировании нежелательные комбинационные частоты не попадали в приемный тракт РЛС. Известно [3], что детекторная характеристика СВЧ смесительных диодов имеет форму, описываемую суммой членов с четными и нечетными степенями 
Простейшими из них являются линейная (m=1) и квадратичная (m=2) характеристики. К нежелательным комбинационным частотам относятся те составляющие, которые образуются за счет действия членов с нечетными степенями (m=1, 3, 5 …). Именно члены с нечетными степенями ответственны за появление в ПХ устойчивых нулей. Для исключения влияния нежелательных гармоник следует промодулировать одну из компонент двухчастотного сигнала таким напряжением, при котором после прямого детектирования на входе приемника РЛС образовались бы два колебания с одинаковыми амплитудами, сдвинутыми по времени модулирующими функциями, но с противоположными фазами несущей (0 и 180 градусов). При этом происходит "расщепление" разностного сигнала на два слагаемых, нечетные гармоники которых компенсируют друг друга, а четные складываются. Однако четные гармоники не несут негативной нагрузки, так как не проходят в тракт приемника РЛС. В самом деле, например, cos2ωпрt раскладывается на составляющую удвоенной частоты cos2ωпрt и постоянное число; cos4ωпрt раскладывается на составляющие учетверенной и удвоенной частоты и постоянное число - все они не попадают в полосу приемника, так как последний настроен на частоту ωпр. Для реализации указанного "расщепления" надо промодулировать частоту одной из компонент двухчастотного сигнала медленно меняющейся функцией (по сравнению с полосой доплеровского фильтра), например, по гармоническому закону, а также произвести фазовую модуляцию прямоугольной волной со значениями фазы 0 и 180 градусов. Частота изменения фазы должна превосходить полосу пропускания селекторной ступени РЛС.
Такова картина при нечетном детектировании, когда m=1, 3, 5 … Иное положение имеет место в случае четного детектирования (m=2, 4, 6…). Обратимся в качестве примера к квадратичному детектированию. "Расщепленные" слагаемые представляют собой противофазные огибающие биений, каждая из которых описывается, как известно [3] квадратным корнем с разными знаками у переменных частей. А переменная часть как раз содержит составляющую с частотой биений или разностной частотой. При возведении такого двучлена в квадрат образуются члены с частотой ωпр, которые и проходят на выход приемника РЛС. Именно эти составляющие, полученные при квадратичном детектировании (а также при m=4, 6…), порождают ПХ.
Для исключения самоподсвета цели и увеличения отношения помеха/сигнал используется увод по скорости в сочетании с шумовой помехой. Основной смысл операции увода состоит в выведении отраженного сигнала из полосы доплеровского фильтра селектора РЛС и принудительном переходе на сопровождение ложного сигнала. При этом воздействие помехи на угломерный координатор РЛС производится на ложной доплеровской частоте, что предопределяет существенное увеличение отношения помеха/сигнал. Увод выполняется путем фазовой модуляции принятых от РЛС колебаний напряжением переменной частоты, при этом изменение частоты происходит либо в сторону увеличения частоты исходных колебаний ("увод вверх"), либо в сторону уменьшения частоты ("увод вниз"). Интервал изменения частоты при уводе находится в пределах от частоты принятого колебания (с разницей в 20-30 гц) до величины, соответствующей выбранной ложной доплеровской частоте (единицы кГц). Закон изменения частоты - линейный, реже параболический или экспоненциальный. Для получения линейного увода необходима параболическая вариация фазы, ввиду чего модулирующее напряжение должно обеспечить указанное изменение фазы. В одноканальном варианте модулирующее напряжение имеет вид пилообразных колебаний (аналоговое исполнение) или ступенчатого колебания с пилообразной огибающей (цифровое исполнение). Узкополосная шумовая помеха прикрывает отраженный сигнал и играет двоякую роль. С одной стороны, шум затрудняет идентификацию и отстройку от помехи, с другой стороны, в режиме поиска по частоте маскирует сигнал цели, уменьшая вероятность его захвата. Возможен и прерывистый режим шумовой помехи. Мощность шума достаточна для надежного прикрытия отраженного сигнала (3-4 дБ), но существенно меньше мощности основного помехового сигнала.
Для исключения возможности гетеродинирования двухчастотного сигнала производится сдвиг по частоте обеих его компонент. Если сдвиг по частоте отсутствует, одна из высших гармоник разностной частоты попадает в полосу приемника РЛС, что эквивалентно самоподсвету цели. С помощью простейших выкладок можно показать, что частоту сдвига δ следует выбирать исходя из неравенства

Минимальная частота сдвига имеет место при k=1 и удовлетворяет неравенству
Такому сдвигу подвергается одна из компонент двухчастотного сигнала. Другая компонента сдвигается по частоте на величину |δ±ωпр|. При знаке плюс сдвиг производится в сторону верхней боковой частоты, а при разностной частоте ωпр-δ (δ≺ωпр) смещение производится в сторону нижней боковой. Сдвиг частоты выполняется путем однополосной балансной модуляции.
Прежде чем анализировать действие помехи, рассмотрим случай ее отсутствия.
Представляя зондирующий сигнал в виде квазигармонического колебания, имеем
V(t)=V0(t)cos[ω0t+φ(t)]=A0(t)cosω0t+C0(t)sinω0t
Примем, что диаграммы направленности антенн в разностном и суммарном каналах РЛС описываются функциями FΔ(θ) и FΣ(θ) соответственно. Отраженный сигнал после гетеродинирования и усиления в тракте промежуточной частоты обоих каналов поступает на входы фазового детектора (ФД) в виде напряжений uΔ(t) и uΣ(t). Приближенное выражение для напряжения на выходе ФД с учетом действия системы АРУ определяется известным соотношением [2]

где α - коэффициент передачи ФД,
k0 - коэффициент усиления,
Q - отношение с/ш.
Звездочкой отмечена комплексно-сопряженная величина.
При больших отношениях с/ш, Q→∞ найдем

Из полученного выражения наглядно виден нечетный характер напряжения uфд, т.к. при смене знака угла рассогласования θ напряжение на выходе ФД меняет знак:
g(-θ)=-g(θ).
Обратимся теперь к двухчастотному сигналу, представив его в виде
u(t)=Vm1cos[(ω+δ)t-φ1]+Vm2cos[(ω+δ+ωпр1)t-φ2],
где ω - частота принятого колебания
δ, δ+ωпр1 - сдвиговые частоты
φ1, φ2 - фазы колебаний
Полученное выражение записывается так:
u(t)=Em(t)cos[ωt-ψ(t)],
где

ψ(t)=φ(t)-δt; Δφ=φ1-φ2

Для огибающей Em(t) удобнее пользоваться другим выражением

где
При Vm1≠Vm2 величина β<1.
Воздействие сигнала помехи производится, однако, не на первой промежуточной частоте ωпр1, а на ложной доплеровской частоте, которую мы обозначим ωg. (Разность ωg-ωпр1 превышает полосу доплеровского фильтра Δωф). При переменной частоте медленно меняющуюся функцию ωg(t) удобно представлять как производную обобщенной фазы γ(t). 

Посмотрим теперь, как сигнал помехи проходит через отдельные узлы разностного и суммарного каналов РЛС. При этом мы используем классическую теорию детктирования СВЧ сигналов [3].
На выходе антенн каналов имеем
uΔ(t)=Em(t)FΔ(θ)cos(ω1t-ψ1)=Em(t)FΔ(θ)cosΦ1(t)
uΣ(t)=Em(t)FΣ(θ)cos(ω1t-ψ1)=Em(t)FΣ(θ)cosΦ1(t),
где ω1 отличается от ω на доплеровское приращение частоты. Вольтамперную характеристику входных смесителей в режиме прямого детектирования будем аппроксимировать экспонентой [3]. При этом ограничимся тремя членами ряда, что даст возможность исследовать действие как четных, так и нечетных составляющих выходного тока детекторов
Учитывая, что напряжения uΔ(t) и uΣ(t) являются периодическими функциями времени, ток детектора можно разложить в ряд Фурье.
iΔ(x)=f(xΔ)=f0(EmFΔ)+f1(EmFΔ)cosΦ1(t)+f2(EmFΔ)cos2Φ1(t)+…
iΣ(x)=f(xΣ)=f0(EmFΣ)+f1(EmFΣ)cosΦ1(t)+f2(EmFΣ)cos2Φ1(t)+…
Коэффициенты ряда вычисляются с помощью следующих выражений:

где cosnΦ=cosn(ω1t-ψ1), n=1, 2
f(x) - нелинейная детекторная функция.
Ввиду того, что высокочастотные составляющие фильтруются, нас интересует низкочастотный член ряда f0.
Полагая 
(При этом cosx=0, если π/2≤x≤π).
Начнем с линейного детектора (k=1). В выражение для выходного тока при прямом детектировании линейно входит огибающая Em(t). Но эта функция состоит из двух радикалов, что затрудняет определение ее спектрального состава. Поступим следующим образом. Ввиду того, что функция Em(t) зависит от малого параметра τ, разложим функцию 

Учитывая известные соотношения для дробных степеней двучленов (1±x)m (x<1), имеем

Кроме постоянных членов в I(t0) входят «быстрые» члены с удвоенной, учетверенной и т.д. частотами, что свидетельствует о непопадании I(t0) в полосу УПЧ. Вычисляя I'(x0), убеждаемся в том, что члены с нечетными степенями взаимно компенсируются, а остаются члены с четными степенями β.
Удвоенные, учетверенные и т.д. частоты, входящие в I'(t0), в полосу приемника также не проходят. Аналогичное положение имеет место и с производными более высоких порядков. Например, вторая производная I''(t0) записывается в виде

где 


Таким образом, все составляющие огибающей Em(t) при линейном детектировании компонент двухчастотной помехи на основе предлагаемого способа формирования в приемный тракт РЛС не проходят.
Обратимся теперь к детектированию при квадратичной характеристике (квадратичный детектор), k=2. Учитывая, что в соотношение для f0 входит 
Пренебрегая слагаемыми, которые не проходят в приемный тракт РЛС, получим
I2≈2β[cosγ(t)-cosγ(t-τ)].
Следовательно, при квадратичном детектировании в смесителе на входы фазового детектора угломера поступает набор разностных функций, сдвинутых во времени, что полностью соответствует физике явления. Напряжения на входах ФД имеют вид


где bΔ(t) и bΣ(t) - остаточные члены. Полагая γ(t)=ωgt+γ0(t), запишем приближенное выражение ПХ в виде
где 
b1,2(θ) и B1(θ) - остаточные четные члены,
φ0 - постоянная фаза,
Учитывая четный характер остаточных членов, получили требуемую четную пеленгационную характеристику.
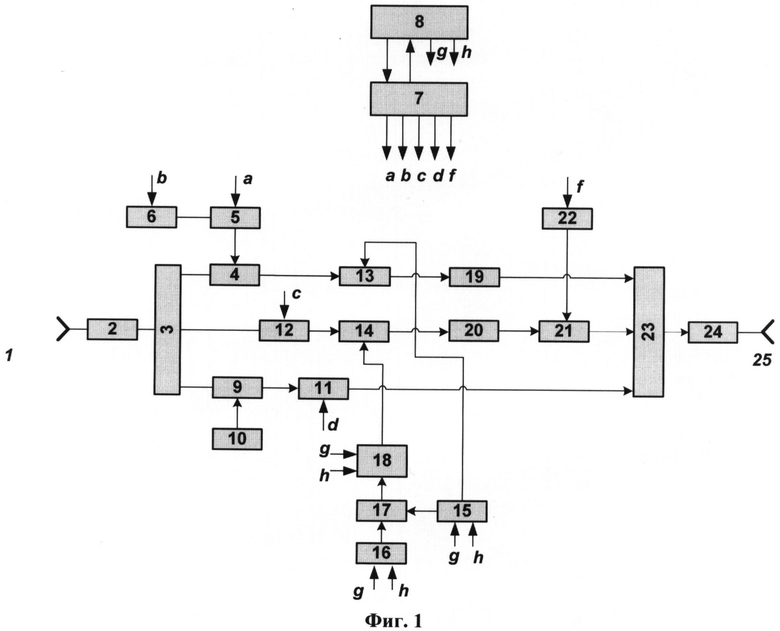
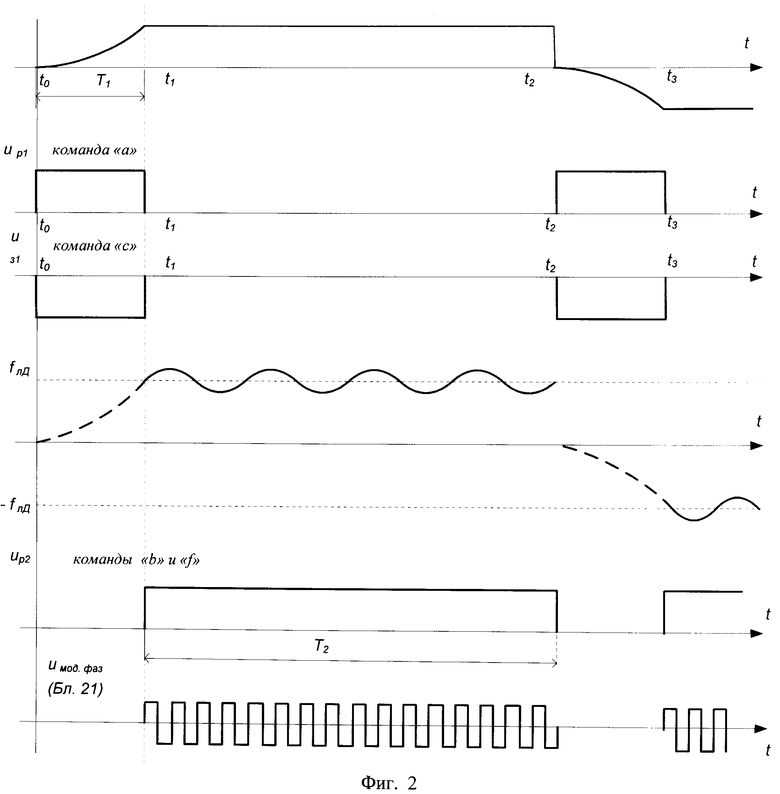
На фиг.1 приведена схема реализации предлагаемого способа, на фиг.2 - эпюры напряжений в различных точках схемы, на фиг.3 - отрезки ПХ вблизи ее нулевых значений [а) без помех, б) известный способ, в) предлагаемое решение].
Схема состоит из приемной антенны 1, входного СВЧ усилителя 2, соединенного с СВЧ разветвителем 3, выходы которого подключены к фазовым модуляторам 4 и 9. Модуляционный вход фазового модулятора 4 соединен с выходом первого генератора модулирующего напряжения 5, к которому подключен также второй генератор модулирующего напряжения 6. Управляющие входы генераторов 5 и 6 соединены с блоком временных интервалов 7, а через него - с блоком управления 8. Модуляционный вход фазового модулятора 9 подключен к генератору узкополосного шума 10, а выход - к СВЧ коммутатору 11. Выходы модулятора 4 и СВЧ коммутатора 12 соединены с балансными СВЧ модуляторами 13 и 14. Модуляционный вход модулятора 13 соединен с первым генератором частоты сдвига 15, а модуляционный вход модулятора 14 - со вторым генератором частоты сдвига 16 через смеситель 17 и фильтр 18. СВЧ усилитель 19 непосредственно, а СВЧ усилитель 20 - через фазовый модулятор 21 - подключены к СВЧ светвителю 23. Модуляционный вход модулятора 21 через третий генератор модулирующего напряжения 22 соединен с блоком временных интервалов 7, а выход светвителя 23 через оконечный СВЧ усилитель 24 - с передающей антенной 25.
Принимаемый антенной 1 сигнал облучающей РЛС после усиления поступает на разветвитель 3, в качестве которого используется направленный ответвитель с тремя выходами - двумя основными и третьим вспомогательным. Первый основной выход подключен к фазовому модулятору 4, предназначенному для создания уводящей помехи каналу скорости РЛС (первый временной интервал) и модулированной поднесущей при формировании помехи угломерному координатору РЛС (второй временной интервал). При реализации уводящей помехи в качестве фазового модулятора используется СВЧ фазовращатель на 2π радиан, на модуляционный вход которого подаются пилообразные колебания (аналоговый вариант) или ступенчатые колебания с пилообразной огибающей (дискретный вариант), при этом частота колебаний меняется в соответствии с законом увода. Так, для линейного увода частота должна меняться по параболическому закону. К известным фазовым модуляторам относятся лампы бегущей волны (ЛБВ) и диодные СВЧ фазовращатели с отрезками линий передачи [4]. При изменении направления увода с положительного на отрицательное и обратно знак наклона колебаний меняется на противоположный. Первый генератор модулирующего напряжения 5 построен на основе управляемого генератора пилообразных колебаний в аналоговой или дискретной форме. Генераторы пилообразных колебаний с электронной перестройкой частоты хорошо известны и описаны в литературе [5]. Также известна используемая в генераторе 5 схема формирования напряжения, изменяющегося по квадратичному (параболическому) закону, с применением электронного интегратора низкочастотной (пилообразной) функции [5].
Первый интервал времени, в течение которого реализуется уводящая помеха по скорости, задается в блоке 7. Путем деления частоты тактовых импульсов в этом блоке производится выделение граничных отметок и формирование интервальных напряжений как для первого, так и второго временного интервала (предназначенного для формирования помехи угломерному координатору РЛС). Кроме того, в блоке 7 по команде из блока управления 8 создаются прямоугольные импульсы запрета прохождения шумовой модуляции. Напряжения, определяющие первый интервал времени, подаются из блока 7 в генератор 5 (команда "а") для фиксации начала и конца увода и в СВЧ коммутатор 12 для запрета передачи СВЧ колебаний на вход модулятора 14 при уводе (команда "с"). Модулирующие напряжения на блоки 13, 14 и 21 в течение первого интервала времени также не подаются.
С третьего выхода разветвителя 3 СВЧ колебания поступают на фазовый модулятор 9, который формирует узкополосные шумовые помехи, прикрывающие на входе РЛС сигнал цели. Для этого используется генератор узкополосного шума 10, состоящий из шумового диода и подмодулятора, создающего бинарную псевдослучайную последовательность импульсов типа меандр с переменным (случайным) периодом. Уровни ограничения шума обычно выбираются соответствующими граничным значениям π, что является условием малого остатка по несущей частоте. Полоса частот шума на выходе модулятора 9 шире полосы пропускания строба скорости РЛС и достигает 2-3 кГц.
При использовании в РЛС логики работы по узкополосному шуму предусмотрена возможность прерывания шумового канала на короткое время выбега частоты в начале увода (с помощью коммутатора 11, команда "d").
Сам шумовой канал (от разветвителя до светвителя) несет малую энергетическую нагрузку, но достаточную, чтобы надежно прикрыть отраженный сигнал. Генераторы шумового напряжения описаны в литературе [1].
В течение второго временного интервала производится формирование помехи угломерному координатору РЛС. Так как увод по скорости завершается выходом на ложную доплеровскую частоту, создаются условия для частотной модуляции поднесущей на сдвинутой частоте. Модуляция выполняется по закону медленно меняющейся функции с тем, чтобы спектр свернутого сигнала помехи в РЛС оставался в пределах строба скорости. Соответствующее модулирующее напряжение (гармоническое напряжение частоты 30-100 Гц) формируется в генераторе 6 и передается в течение второго интервала времени в блок 5. Команда разрешения на передачу поступает из блока 7 (команда "b"). На этом этапе работы пилообразные колебания, создаваемые в блоке 5, дополнительно модулируются по частоте поступившим из блока 6 напряжением.
Компоненты двухчастотной помехи формируются с помощью балансных модуляторов 13 и 14, включенных в двухканальную систему ретрансляции СВЧ колебаний. В блоке 13 производится сдвиг частоты на величину δ, в блоке 14 - на величину |δ±ωпр1|. Для получения требуемого результата модуляторы 13 и 14
переводятся в режим однополосной модуляции. Каждый из них состоит из двух симметричных плечей, причем СВЧ колебания поступают на них в фазе, а модулирующие напряжения - со сдвигом фаз 90°. Промодулированные колебания одного из плечей подаются на выходной сумматор непосредственно, а с другого плеча - со сдвигом фазы 90°, вследствие чего одна из боковых полос выходного сигнала суммируется, а другая вычитается, т.е. компенсируется. Балансные модуляторы этого типа описаны в литературе и строятся в последние годы на базе применения гибридных кольцевых мостов с диодами в печатном исполнении [6]. В таких модуляторах обеспечивается подавление несущей в октавной полосе частот более 25 дБ.
Опорными источниками при формировании модулирующих напряжений для блоков 13 и 14 являются генераторы синусоидальных колебаний 15 и 16. Генератор 15 задает частоту δ, генератор 16 - частоту ωпр1. Команды на выставление частот поступают из блока управления 8 (команды g, h). Отсюда же направляются разрешающие импульсы на модуляцию блоков 13 и 14 (второй временной интервал). Данные о промежуточной частоте ωпр1 РЛС поступают на блок 8 заранее или по командной линии связи от средств радиоэлектронной разведки. Для формирования второй модулирующей (сдвиговой) частоты используется смеситель 17, на выходе которого образуются сигналы преобразованной частоты. Выделение требуемого модулирующего колебания с частотой ωпр1+δ или |ωпр1-δ| производятся фильтрами 18 по команде с блока 8. Смена полос модуляции в блоках 13 и 14 (с верхней на нижнюю и наоборот) выполняется изменением полярности модулирующих колебаний.
Бинарная модуляция фазы (0 и 180°) производится во втором канале формирования двухчастотной помехи с помощью фазового модулятора 21. Источником модулирующих колебаний является третий генератор модулирующего напряжения 22, разрешающие импульсы на который подаются из блока 7 (второй временной интервал, команда "f"). Модулирующее напряжение представляет собой колебания типа «меандр» с частотой, превышающей полосу пропускания селектора РЛС.
Сформированные компоненты помехи суммируются вместе с шумовой помехой в светвителе 23 и после усиления (блок 24) излучаются антенной 25 в направлении РЛС.
1. Защита от радиопомех. Под ред. М.В. Максимова. М., Соврадио, 1976.
2. А.И. Леонов, К.И. Фомичев. Моноимпульсная радиолокация. М., Радио и связь, 1984.
3. В.И. Бунимович. Флуктуационные процессы в радиоприемных устройствах. М., Соврадио, 1951.
4. Г.С. Хижаидр. СВЧ фазовращатели и переключатели. М., Радио и связь, 1984.
5. Ю.Н. Ерофеев. Импульсная техника. М., Высшая школа, 1984.
6. Е.М. Воробьевский и др. Широкополосные балансные модуляторы СВЧ. Электронная техника, серия 1, вып.9, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗИРОВАНИЯ РАДИОСИГНАЛОВ | 2012 |
|
RU2489729C1 |
| СПОСОБ ИМИТАЦИИ ДВУХЧАСТОТНЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2485541C1 |
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ | 2012 |
|
RU2485539C1 |
| СПОСОБ ПОДДЕРЖАНИЯ КОГЕРЕНТНОСТИ МОДУЛИРОВАННЫХ РАДИОСИГНАЛОВ | 2012 |
|
RU2476984C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ РАДИОЭЛЕКТРОННЫМ СИСТЕМАМ УПРАВЛЕНИЯ | 2012 |
|
RU2483341C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2452985C2 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
Способ создания двухчастотной помехи радиолокационной станции (РЛС) с непрерывным или импульсным излучением и селекцией целей по скорости при первой промежуточной частоте ωпр заключается в следующем. Принятый на движущемся объекте от облучающей РЛС радиосигнал разделяют на три составляющих, первую составляющую на ложной доплеровской частоте модулируют по фазе медленно - меняющимся, например, гармоническим колебанием, промодулированную первую, а также вторую составляющие сдвигают по частоте путем балансной модуляции, величину сдвига выбирают равной соответственно δ, |δ±ωпр|, где δ удовлетворяет неравенству
Способ создания двухчастотной помехи, основанный на приеме на движущемся объекте непрерывных или импульсных колебаний облучающей радиолокационной станции (РЛС), имеющей систему селекции по скорости, и излучении в направлении той же РЛС двух радиосигналов, разнесенных по частоте на величину, равную первой промежуточной частоте ωпр этой РЛС, отличающийся тем, что принятые от РЛС колебания разветвляют на три составляющих, генерируют напряжение переменной частоты, модулируют первую составляющую разветвленного колебания по фазе полученным напряжением, при этом меняют частоту первой составляющей в сторону увеличения ("увод вверх") или уменьшения ("увод вниз") от частоты принятого колебания до величины, соответствующей выбранной ложной доплеровской частоте, из промодулированных колебаний формируют первую компоненту двухчастотного сигнала путем сдвига по частоте на величину δ, удовлетворяющую неравенству 
где Δω - полоса пропускания РЛС по первой промежуточной частоте, формируют из второй составляющей разветвленного колебания вторую компоненту двухчастотного сигнала путем сдвига по частоте на величину |δ±ωпр|, из третьей составляющей разветвленного колебания формируют шумовую компоненту путем фазовой модуляции узкополосным шумом, одновременно с формированием компонент двухчастотного сигнала меняют выбранную частоту модуляции, например, по гармоническому закону, генерируют колебание типа меандр с частотой, превышающей полосу пропускания селектора РЛС, полученным колебанием меняют фазу одной из компонент двухчастотного сигнала от нуля до 180°, светвляют эти компоненты вместе с шумовой компонентой и излучают результирующий сигнал.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| - М.: Радио и связь, 1984 с.207-252 | |||
| ГЕНЕРАТОР СИГНАЛОВ ШУМОВОЙ ПОМЕХИ | 2001 |
|
RU2193214C1 |
| RU 2002135322 А, 10.07.2004 | |||
| RU 2009116699 А, 10.11.2010 | |||
| Межоритарный триггер | 1973 |
|
SU465737A1 |
| WO 2011125060 А2, 13.10.2011 | |||
| US 6133865 А, 17.10.2000 | |||
| JP 63217286 А, 09.09.1988. | |||

