изобретение относится к области автоматического управления и .может быть ирименено в системах автоматизированного проектирования (Программного управления металлообрабатывающими станками и в других случаях, когда требуется отработка дуги окружности или прямой.
Известны линейно-круговые интерполяторы, содержащие тенерато-р тактовых импульсов, счетчик текущей абсциссы, регистры коэффициентов, устройство ввода, реверсивный счетчик, логический и вычислительный блоки.
Недостатком известных интерполяторов является зависимость скорости отработки от угла наклона отрабатываемого участка.
Кроме того, они отрабатывают дуги только с центром :В начале координат и отрезок прямой, начало которого совпадает с началом, а также -производят формирование дуги в нределах одной четверти, не дающее зеркального отображения.
Целью изобретения является создание такого линейно-кругового интерполятора, который обеопечил бы высокую скорость интерполирования, независимо от угла наклона отрабатываемого участка, отрабатывал дуги, окружности и наклонные прямые независимо от того, совпадает ли с началом координат центр дуги, окружности или начало прямой, а так
же одновременно формировал бы дугу и ее зеркальное отображение.
Для достижения этой целн предложенный интерполятор содержит блок определения квадранта отработки, блок команд, дешифраторы, счетчик синхроимпульсов и генератор синхроимпульсов, подключенный к счетному входу счетчика синхроимпульсов, выход которого через первый дешифратор, а установочный вход непосредственно подключены соответственно к первому входу и .первому выходу блока команд, блок режима вычисления, схему сдвига, блок управления сдвигом, группы собирательных схем и блок формирования текущего значения коэффициента, первый вход которого подключен к выходу первого регистра коэффициентов и входу второго дешифратора, второй - через последовательно соединенные второй регистр коэффициентов и первую группу собирательных схем - к выходу второго дешифратора, третий - к выходу блока определения квадранта отработки и второму входу блока команд, четвертый - ко второму выходу блока команд, пятый - к первому выходу реверсивного счетчика. Выход блока формирования текущего значен1 я коэффициента подсоединен ко второму входу реверсивного счетчика, третий и четвертый входы которого соответственно соединены с третьим и четвертым выходами блока команд,
а второй выход реверсив ного счетчика через последовательно соединенные третий дешифратор и вторую группу собирательных схем соединен с логическим блоком, а через блок управления сдвигом - с первым входом схемы сдвига. Второй вход носледней подключен к первому выходу вычислнтелыюго блока, третий и четвертый--соответственно к нятому н шестому выходам блока команд. Первый выход схемы сдвига подсоединен ко второму входу вычислительного блока, а второй - к третьему входу блока команд, четвертый вход которого соединен с выходом генератора синхроимпульсо1В, нятый - со вторы.м выходом вычислительного блока, шестой - к счетному входу счетчика текущей абсциссы. Первый выход этого счетчика подключен к нервому входу блока определения квадранта отработки, а второй через блок режима вычисления- к седьмому и восьмому входам блока команд, седьмой выход которого соединен с логическим блоком, восьмой - с устройством ввода, а девятый - с третьим входом вычислительного блока, третий выход которого подключен к устройству ввода, а четвертый- ко второму входу блока-онределения квадранта отработки, третий и- четвертые входы которого соединены с устройством ввода, выходы которого подключены к соот1ветствующ11м входам блокарежима вычисления.
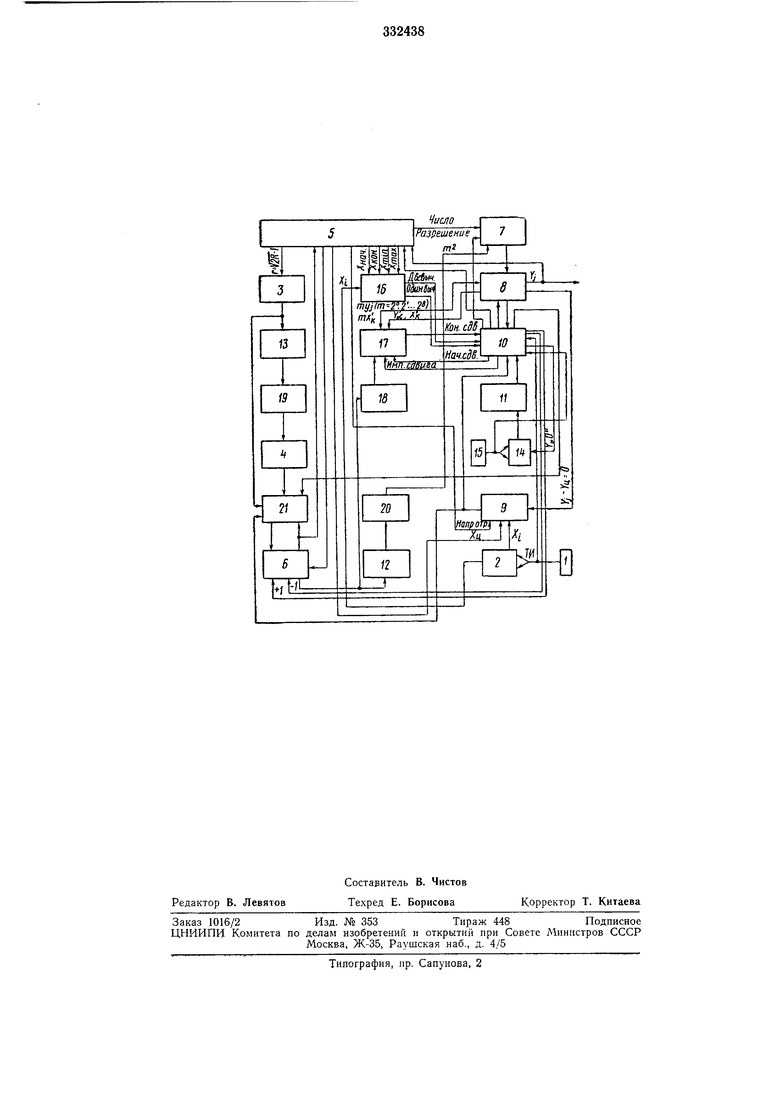
На чертеже ириведёна---блок-схема линейнокруговото интерполятора.
Интерполятор содержит генератор тактовых импульсов 1, счетчик текущей абсциссы 2, регистры коэффициентов 3 и 4, устройство ввода 5, реверсивный счетчик 6, логический блок 7, вычислительный блок 8, блок определения квадранта отработки 9, блок команд 10, дешифраторы 11-13, счетчик синхроимпульсов 14, генератор синхроимпульсов 15, блок режима вычисления 16, схему сдвига 17, блок управления сдвигом 18, группы собирательных схем 19, 20 и блок формирования текущего значения коэффмцнента 21.
Интерполятор работает следующим обра30 М.
Из носителя входной информации (на схеме не показан) все необходимые данные для интерполирования элемента (наклонная лшшя, дуга или окружность) поступают в устройство ввода 5. Отработка элемента производится построчно, т. е. дается шриращеиие ою оси абсцисс (прибавляется единица к тег ущей абсциссе) и вычисляется соответствующая ордината. Если имеем двойное вычисление (дуга или окружность) но вычисленной ординате, находится ее симметричная точка. Приращением абсциссы, т. е. едииицей выбранного масштаба является тактовый импульс (ТИ) генератора 1, который поступает на счетный вход счетчика 2 текущей а1бсциссы Xi и в блок команд 10 в качестве команды «Начало вычисления.
бранного масштаба, а то оси ординат - на m едиииц и вычисляется фуикция FIJ, оценивающая цо какой оси дать следующий шаг. Текущее значение оценочной функции с каждым шагом интерполяции в случае дуги или окружности меняется следующим образом.
При шаге но оси X во втором или в третьем квадрантах
/i+ij- ii-SA-i+l,
где FII предыдущее значение функцни. - При Hiare но оси Y во втором или в третьем квадрантах
i,H.m Fij + 2myj + m2.
При шаге но оси /Y в нервом или в четвертом квадраитах
,j -Fij + 2Xi+ 1
При шаге но оси У в нервом или в четвертом квадраитах
fi,j+m /ij-2my + n.
В случае наклонной линии нри шаге но оси . оценочная функция вычисляется как
i-i-i,i - ij-yk, а ири шаге по оси У
Pij+m fij + mAh,
где Xk, УК - координаты конечной точки отрабатываемого отрезка относительно его иачала.
Координаты оиориых точек отрабатываемого элемента задаются в системе коордииат с началом в цроизвольиой точке. Однако в формулы оцецочной функцни входят координаты в системе, начало которой совпадает с центром дуги, окружности или с началом отрезка прямой.
у/ у/ vt у/
Ль / J, л It, г 1;
вычисляются в нитерполяторе по формулам преобразования координат (параллельный перенос осей).
При вычислении оценочной функции берутся абсолютные значения координат.
Для определения значеиия коэффициента /п из устройства ввода 5 величина г (где R - радиус дуги или окрул ности) иостуиает в первый регистр 5, дешифрируется, и через груииу 19 заиисываются в регистр 4 коэффициентов т, mz и /Пз первые значения нриращеиия ордннаты для данной окружностн или дуги. Пз устройства ввода 5 в реверсивиый счетчик 6 поступает АУ- текущее зиачение приращения ординаты. В блоке формирования 21 iioBoro коэффициента производится сравнеиие ЛУ с т, то и т, и если АУ находится в диапазоне г-/Пз, то в качестве нового коэффициента т, т. е. нового значения нриращения ординаты АУ, берется или г, или Ш, или тг, или Шз в зависимости от того в каком интервале находится старое
значение AF (между г и mi, между mi п тз или между mz и Шз), и в отрабатываемом квадранте АУ возрастает или убывает. Новый коэффициент записывается в реверсивном счетчике 6 вместо старого АУ. Если старое значение АУ не находится в диапазоне г-Шз, это значит, что оно меняется нлавно (на единицу или две единицы) или остается неизменным, поэтому в вычислениях иснользуется старое значение А У и в нроцессе вычисления корректируется.
Для того чтобы иогренлюсть интерполнрования лежала в пределах единицы выбранного масштаба, после основного шага (niar на т единиц масштаба) дается одни или несколько элементарных шагов (шаг на единицу) по оси ординат. Корректнрующие наги даются в нанравлении основного шага или в противоиоложном направлении в завнсимости 07 того, изменился или нет знак оценочной функции после основного шага, н в нужных случаях корректируется коэффициент т и текушая ордината, вычисленная по формуле:
У Уьга±т,
где предыдущее значение текущей ордиваты в старой системе координат.
Для наклоинон линии текущая ордниата требует коррекцию в случае наконления погрешности, вызванной округлен ем т, а коэффициент
m«:;Ay tga (tga - угловой коэффициент)- постоянная величнна, и его значение не корректнруется. Для того, чтобы умножение заменить онерацией сдвига, коэффициент в реверсивном счетчике 6 разлагается на слагаемые, представляющие степепи числа «2. Эти слагаемые (2°, 2 ... 2) подаются в блок 18, который посылает управляющие признаки в схему /7. Схема сдвига осуществляет сдвиг текущей ординаты Yj дуги нли окружности и абсциссы конечиой точки ирямой . Иными словами схема сдвига осуществляет умножение Yj (или Хк) на слагаемые 2, 2, ..., 2, которые в сумме дают коэффициент т. Величины 2oyj, ,1, ..., с выхода схемы /7 постуиают в сумматор и в результате сложения получается (2° + 2 ... + + 2).
Аналогично получается тХ. Таким образом, операциями сдвига и сложения осуществляется умножение на т.
Выходы дешифратора 12, который дещифрнрует А У, возбуждают соответствующие входы группы 20 и иа ее выходах образуется }зеличина т, которая при вычислении оценочной функции дуги и окружности подается в 1 ычислитель 1ый блок 8 через логический блО:К 7, управляемый блоком Ю.
Для отработки дуги или окружности необходимо определить положение текущей точки отработки относительно осей координат. С этой целью в блок 9 из устройства 5 ностунают направление отработки и абсцисса центра Xj. Из счетчика 2 в блок 9 иодается текущая абсцисса Xi, а из вычислительного блока 8 признак У;-Уц 0 или yj-Уц О, прпчем Ai, Хц, Yj, Уц - коорднпаты в старой системе.
Определение квадрантов нронзводнтся следующим образом.
ЕслпА| А„, нли , , н направление отработки 0, имеем второй квадраит.
Если ,,, или , ,, и направление отработки 1, имеем третий квадрант.
Если А:1 Хц, У.,Уц или , имеем первый квадрант.
Если Х; Х. или Х,ц, ) имеем четвертый квадрант.
Иаправление отработки онределяется следующнм образом. Двнжение по отрабатыBaei ioi дуге производится с пачальпо точкн к конечной (начальная и конечная точка всегда определяется из условия .пач СА;;оп).
Если направленне движения совпадает с направлением движения часовой стрел.ки, «анравление отработки равно нулю. В противнод случае направление отработки равно единице. При таком построенни схемы онределен я квадранта отработки при переходе от двойного вычисления к одииарному текущая точка отработки остается в том же квадранте, в котором она была до этого, и в точках перехода от двойного вычисления к одинарному не ирндется разлнчать два случая заполгипання ордииаты: запомнить ординату текущей точки или ее зеркального отображения.
Блок режима вычисления 16, предназначенный для установления режима одинарного или двойиого вычисления устанавлнвает режим двойного вычисления, если данная строка пересекает дугу или окружность в двух точках. В этом случае после вычисления текущей ордннаты, вычисляется ордината снмметрнчной точки по формуле
У2-2Уц-УЬ
где У н У2 ордннаты точек, расположенных симметрично относительно диаметра, параллельного осп абсцисс.
Блок 10 служит для управлення операциями. Он иредставляет собой схему, построенную таким образо: 1, чтобы она вырабатывала последовательность управляющих нмпульсов, необходимую для вычисления нромежуточных точек, дуги, окружности и наклонной прямой. Для этого в блок команд поступают синхронизирующие п.мпульсы от генератора 15 и нх номера, которые определяются прн помощи счетчика 14 и связанного с ним дешифратора //. Ио номерам синхроимпульсов блок команд коммутирует вычислительный блок 8 на выполнение нужной операции.
Вычислительный блок 8 состоит из регистров слагаемых, в которые поступают операнды через логический блок, управляемый блоком команд, и сумматора для выполнения арифметических операций. Текущая ордината У (результат вычисления) посылается потребителю и в устройство ввода 5 вместо ее лредыдущего значения. В работе интерполятора следует различать два случая: 1)Отработка производится построчло эле- 5 мент за элементом. В этом случае элемент отрабатывается построчно полностью, и после этого переходят на следующий элемент. В таких случаях в устройстве 5 находится исходная информация об элементе до окончания ю отработки. После каждой строки, т. е. с приходом очередного тактового импульса, .в устройстве ввода 5 старые значения текущей ординаты и ее нриращения заменяются новыми значениями. 2)Производится отработка нескольких элементов со строчной раз-верткой. В этом случае по каждому тактовому импульсу вычисляются точки пересечения с данной строкой (разверткой) всех элементов. Это осуществ- 20 ляется следующим образом. С приходом тактового импульса прибавляется единица к текущей абсциссе, т. е. устанавливается номер текущей развертки. Вычисляются точки первого элемента в этой строке. В устройство 25 ввода 5 из .реверсивного счетчика 6 и вычислительного блока 5 поступают новые значения текущей ординаты FJ и приращения ординаты АУ вместо их старых значений. Исходная информация данного элемента посылается в ЗО запоминающее устройство (иа схеме не показано), и в устройство ввода поступает исходная информация следующего элемента. В следующей строке отработка начинается опять с первого элемента н продолжается 35 аналогично 01П.исанному выще. Предмет изобретения Линейно-круговой интерполятор, содержащий генератор тактовых импульсов, подклю- 40 ченный к счетному входу счетчика текущей абсциссы, регистры коэффициентов и устройство ввода, подключенное к входу первого регистра коэффиицентов, первому входу и первому выходу реверсивного счетчика и че-45 рез логический блок к первому входу вычислительного блока, отличающийся тем, что, с целью повыщения скорости работы интерполятора и расширения его функциональных возможностей, он содержит блок определения50 квадранта отработки, блок команд, дешифраторы, счетчик синхроимпульсов, генератор синхроимпульсов, подключенный к счетному 15 входу счетчика синхроимпульсов, выход которого через первый дешифратор, а установочпый вход непосредственно подключены соответственно к первому входу и первому выходу блока команд, блок режима вычисления, схему сдвига, блок управления сдвигом, группы собирательных схем и блок формирования текущего значения коэффициента, первый вход которого подключен к выходу первого регистра коэффициентов и входу второго дещифратора, второй - через последовательно соединенные второй регистр коэффициентов и первую группу собирательных схем - к выходу второго дещифратора, третий - к выходу блока определения квадранта отработки и второму входу блока команд, четвертый - к второму выходу блока команд, пятый - к первому выходу реверсивного счетчика, а выход- ко второму входу реверсивного счетчика, третий и четвертый входы которого соответственно соединены с третьим и четвертым выходами блока -команд, а второй выход реверсивного счетчика через последовательно соединенные третий дещифратор и вторую группу собирательных схем соединен с логическим блоком, а через блок управления сдвигом - с первым входом схемы сдвига, второй вход которой подключен к первому выходу вычислительного блока, третий и четвертый-- соответственно к пятому и щестому выходам блока команд, первый выход--ко второму входу вычислителыного блока, а второй - к третьему входу блока команд, четвертый вход которого соединен с выходом генератора синхроимпульсов, пятый - со вторым выходом вычислительного блока, шестой-к счетному входу счетчика текущей абсциссы, первый выход .которого подключен к первому 1входу блока определения квадранта отработки, а второй через блок режима вычисления - к седьмому и восьмому входам блока команд, седьмой выход которого соединен с логическим блоком, восьмой - с устройством ввода. а девятый - с третьим входом вычислительиого блока, третий выход которого подключен к устройству ввода, а четвертый - ко второму входу блока определения квадранта отработки, третий и четвертый входы которого соединены с устройством ввода, выходы которого подключены к соответствующим входам блока режима вычисления, причем выход третьего дешифратора через третью группу собирательных схем соединен с логическим блоком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1976 |
|
SU647653A1 |
| Устройство для формирования окружностей | 1981 |
|
SU991486A1 |
| Устройство для формирования окружностей | 1983 |
|
SU1096688A2 |
| Устройство для вывода графической информации | 1972 |
|
SU479106A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Устройство для формирования информативных признаков при распознавании образов | 1987 |
|
SU1443013A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Круговой интерполятор | 1986 |
|
SU1352461A1 |
| Устройство для формирования информативных признаков при распознавании изображений | 1987 |
|
SU1559358A1 |
| Устройство для формирования окружностей | 1984 |
|
SU1221678A2 |