Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления.
Цель изобретения - р.асширение функциональных возможностей устройства и упрощение программирования .
Введенные дополнительные блоки позволяют производить переключение реверсивных счетчиков координатных каналов на границах квадрантов при интерполяции дуги, изменять направление вьщачи приращений координат на выходах устройства, сохранять точность круговой интерполяции в один шаг при многоквадратной обработке дуги и с минимальными переключениями .. переходить из режима круговой интерполяции в режим линейной интерполяции.
Данное решение позволяет интерполировать дугу окружности в неограниченных пределах по данным одного кадра программы, что упрощает программирование, уменьшает длину исходного программоносителя, экономит память устройства при хранении управля- ющей программы в нем, улучшает параметры программы, уменьшает сложность постпроцессоров и повышает качество изготовляейь1Х на станке деталей.
На фиг. I приведена схема предла- гаемого интерполятора; на фиг. 2 - схема формирователя знака оценочной функцииi на фиг. 3 - схема блока переключения; на фиг. 4 - схема блока управления реверсивным счетчикомj на
10
5
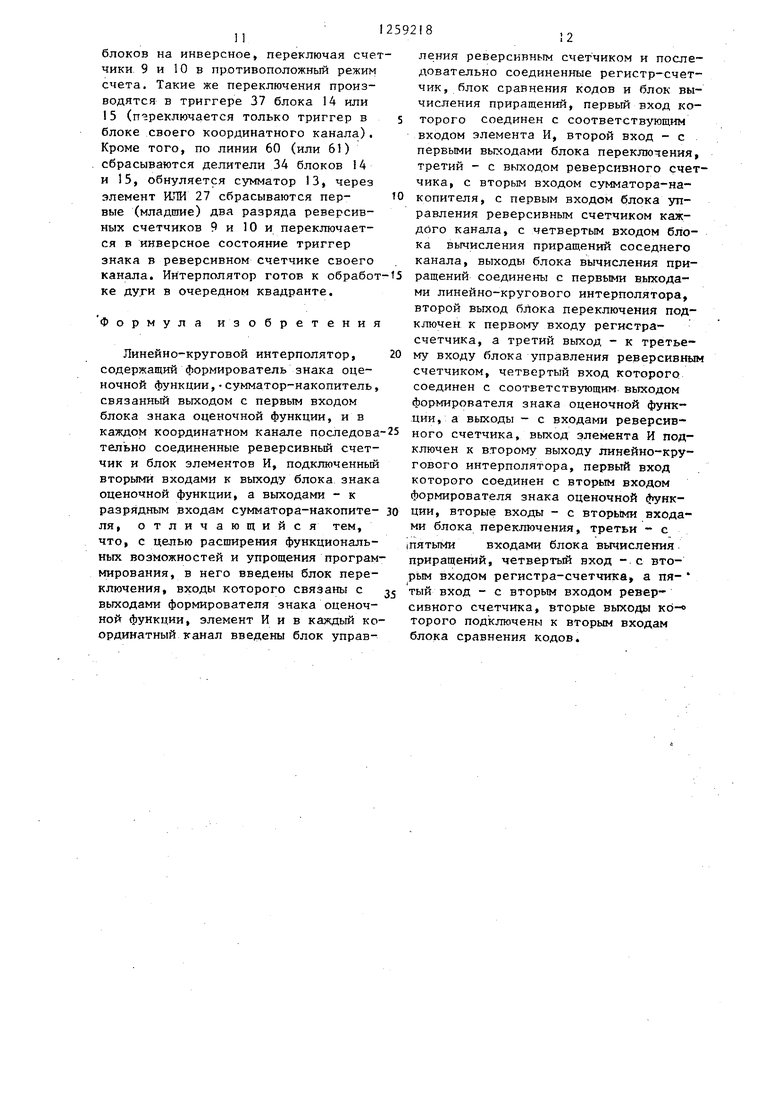
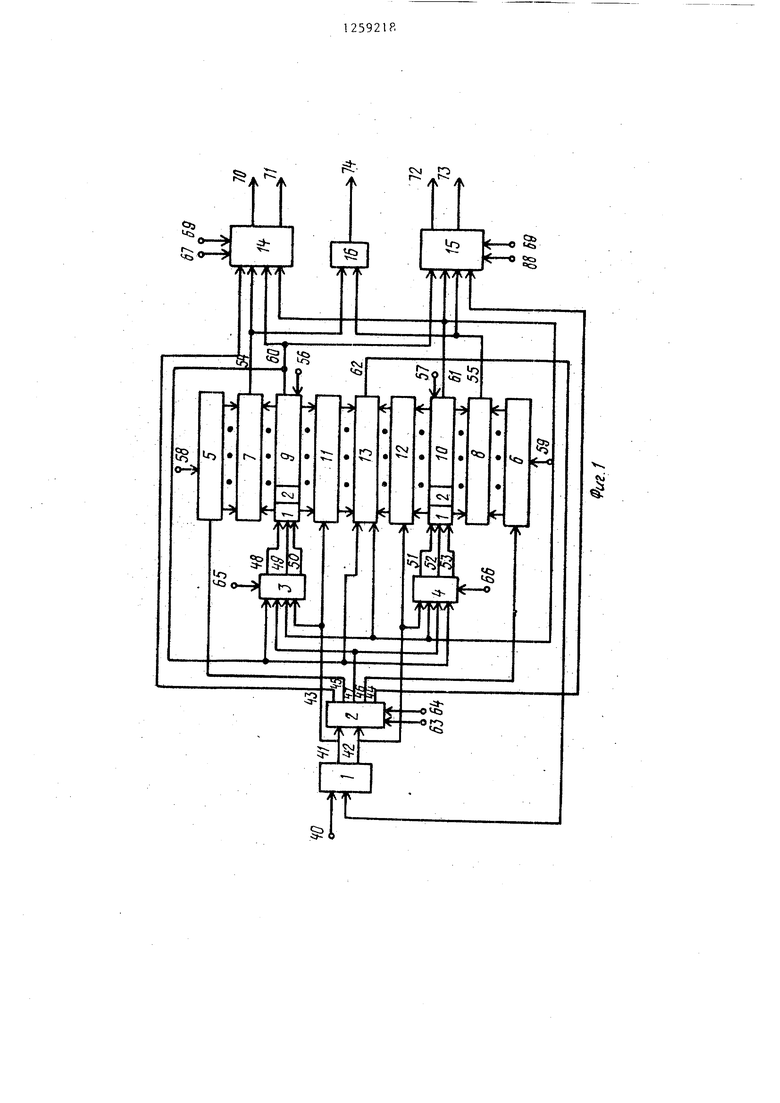
Блок 2 переключения содержит RS- триггер. 20, четыре элемента И 21-24, элементы ИЛИ 25 и 26.
Блоки 3 и 4 управления реверсивными счетчиками идентичны и каждый
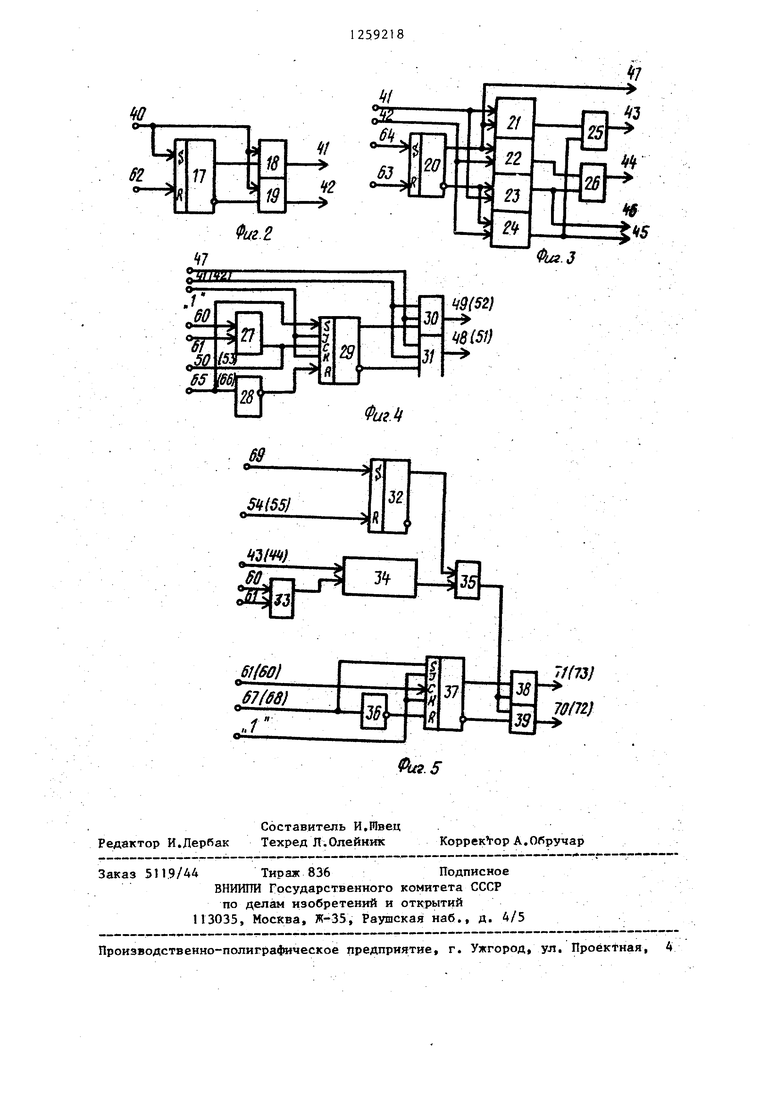
из них содержит элемент ИЛИ 27, инвертор 28, 1К-триггер 29 с возможностью предустановки по S и R входам, элементы И 30 и 31.
Блоки 14 и 15 вычисления приращений идентичны. Каждый из них содержит К,8-триггер 32, элемент ИЛИ 33, делитель 34 на четыре, элемент И 35, инвертор 36, IK триггер 37 с возможностью предустановки по S- и R-входам, элементы 38 и 39.
20
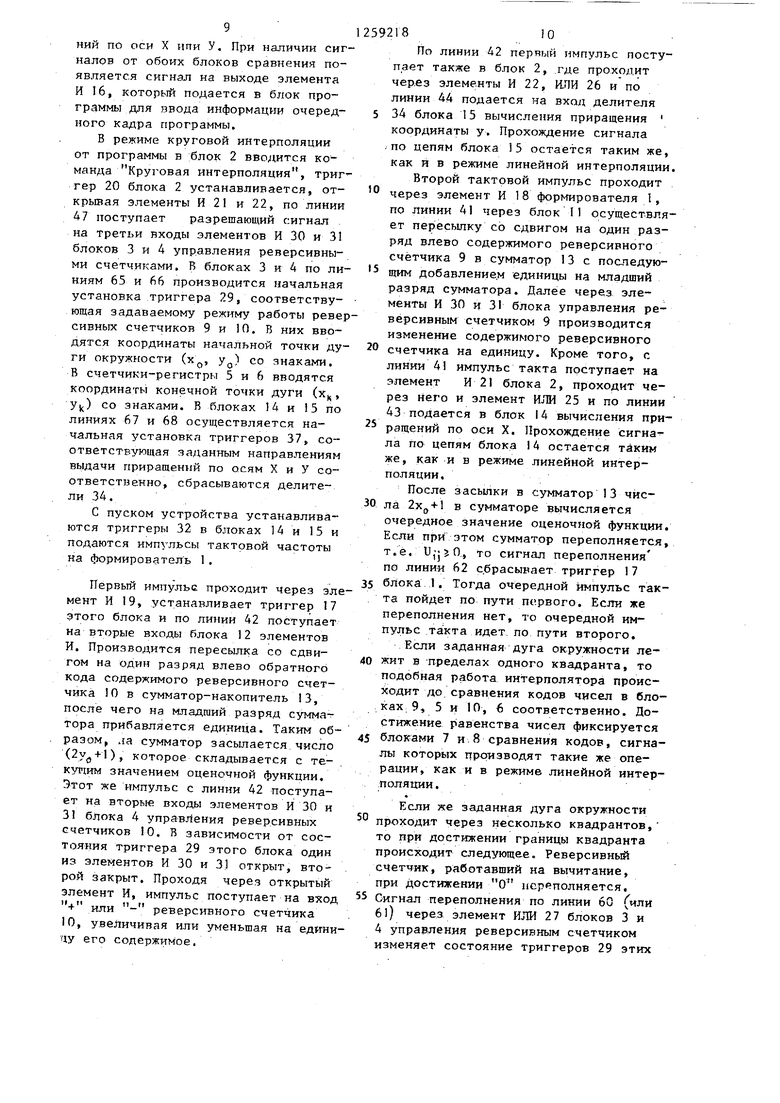
Функциональные связи устройства осуществляются по следующим линиям: вход 4П формирователя 1 знака оценочной функции является входом тактовой частоты, выходы 41 и 42 формирователя 1 знака оценочной функции, 25 выходы 43-47 блока 2 переключения, первый 48 (51) и второй 49 (52) выходы блока 3 (4) управления реверсивным счетчиком, выход 50 (53) блока 3 (4), входы 54 и 55 блоков 7 и 8 сравнения кодов соответственно, выходы 56 и 57 загрузки реверсивных счетчиков 9 и 10 соответственно являются входами устройства и соеди- иены с блоком программы; входы 58 и 59 загрузки регистров-счетчиков 5 и 6 соответственно соединены с блоком программы, выxoд ы 60 и 61 переполнения реверсивных сЧетчиков 9 и 10 соответственно, выход 62 пезо
35
фиг, 5 - схема блока вычисления прира-„ Реполнения старшего разряда суммато- щений. ра-накопителя 13, входы 63 и 64 блоИнтерполятор содержит формирова- 2 переключения для сброса или ус- тель 1 знака оценочной функции, блок 2 переключения, блоки 3 и 4 управления реверсивными счетчиками, регистры-., счетчики 5 и 6 координат, блоки 7 и 8 сравнения кодов, реверсивные счетчики 9 и 10 с возможностью параллельной записи и считывания кодов, блоки Пи 12 элементов И, сумматор-накопитель 13, блоки 14 и 15 вычисления
тановки триггера 20 этого блока по командам линейной или круговой интерполяции подключены к блоку про-.
граммы, входы 65 и 66 начальной установки триггеров 29 .блоков 3 и 4 соответственно, входы 67 и 68 начальной установки триггеров 37 блоков 14 и 15 вычисления приращений
50 соответственно подключены к блоку программы, вход 69 установки триггера 32 блоков 14 и 15 подключен к блоку программы; выходы 70 (72), 71 (73) устройства по координатам
приращений, элемент И 16.
Формирователь 1 знака оценочной функции содержит RS-триггер J7 и два элемента И 18 и 19. S-вход триггера подключен к входу устройства, R-вход - к выходу переполнения старшего разряда сумматора 13.
Блок 2 переключения содержит RS- триггер. 20, четыре элемента И 21-24, элементы ИЛИ 25 и 26.
Блоки 3 и 4 управления реверсивными счетчиками идентичны и каждый
из них содержит элемент ИЛИ 27, инвертор 28, 1К-триггер 29 с возможностью предустановки по S и R входам, элементы И 30 и 31.
Блоки 14 и 15 вычисления приращений идентичны. Каждый из них содержит К,8-триггер 32, элемент ИЛИ 33, делитель 34 на четыре, элемент И 35, инвертор 36, IK триггер 37 с возможностью предустановки по S- и R-входам, элементы 38 и 39.
Функциональные связи устройства осуществляются по следующим линиям: вход 4П формирователя 1 знака оценочной функции является входом тактовой частоты, выходы 41 и 42 формирователя 1 знака оценочной функции, выходы 43-47 блока 2 переключения, первый 48 (51) и второй 49 (52) выходы блока 3 (4) управления реверсивным счетчиком, выход 50 (53) блока 3 (4), входы 54 и 55 блоков 7 и 8 сравнения кодов соответственно, выходы 56 и 57 загрузки реверсивных счетчиков 9 и 10 соответственно являются входами устройства и соеди- иены с блоком программы; входы 58 и 59 загрузки регистров-счетчиков 5 и 6 соответственно соединены с блоком программы, выxoд ы 60 и 61 переполнения реверсивных сЧетчиков 9 и 10 соответственно, выход 62 пе
2 переключения для сброса или ус-
тановки триггера 20 этого блока по командам линейной или круговой интерполяции подключены к блоку про-.
граммы, входы 65 и 66 начальной установки триггеров 29 .блоков 3 и 4 соответственно, входы 67 и 68 начальной установки триггеров 37 блоков 14 и 15 вычисления приращений
соответственно подключены к блоку программы, вход 69 установки триггера 32 блоков 14 и 15 подключен к блоку программы; выходы 70 (72), 71 (73) устройства по координатам
+х(+у), -х(-у) соответственно связывают выходы элементов И 39 и 38 блока 14 (15) с выходами устройства; на выход 74 элемента И 16,
3 .
выход устройства падает сигнал окон чания интерполяции участка и смены кадра, и он связан с блоком программы.
Интерполяция в устройстве ведется по методу оценочной функции. При линейной интерполяции оценочная фун ция имеет вид IJjj йху -4ух;, где X;, у - координаты текущей точки интерполяционной траектории, дх, ду - приращения координат х и у на участке интерполяции; U;; - значение О71еночной функции в. точке (х-, Yj ) f
Из фиг. 6 видно, что если , то для приближения к заданной прямой следует сделать шаг вдоль оси У Если же U;: О, то шаг делается вдол .оси X. На самой прямой U;j 0, и направление перемещения определяется
произвольно. При аппаратной реализации алгоритма удобней в этом случае делать шаг вдоль оси X. При ща- ге по оси X новое значение оценочно функции: U;, 4ху--лу(х; + 1)и- -йу. При шаге по оси У соответственно получим U; , йх(у| +I)-uyx; Ujj +UX.Таким образом, стратегия линейной интерполяции выглядит так. Анализируется знак оценочной функции. Если , то делается шаг по оси X и из предыдущего значения оценочной функции вычитается величина ду, если же U;: сО, то делается шаг по оси У и к предыдущему значенио оценочной функции.прибавляется величина их, В процессе интерполяции шаги по координатам подсчитываются. Интерполяция прекращается, когда текущие значения координат X и у сравниваются с величиной АХ соответственно.
При круговой интерполяции обычно оценочная функция имеет вид
и. ()-.
При таком определении оценочной функции для точек, лежащих вне круга, , для точек, лежащих внутри круга, и- 0, для точек на окружности Ujj 0. Стратегия интерполяции зависит от положения текущей точки траектории и направления обхода дуги окружности. Так, если точка (х;, yj) находится в первом квадранте и движение идет против часовой стрелки (фиг. 7), то при делается шаг вдоль оси У и вычисляется новое значение оценочной функции Uii., х;+(yj -1 f -Ro xt y; -Ro+2yj -t-I
25
59218 . 4
U; +2y-+l (1), a значение yj увели-, чивается на единицу. Если же U;j О, то делается шаг вдоль оси X, вычисляется и,-„. (х;- I f +y|-R x +yJ-R - 5 -2x; + U;j -2x.- + l (2), a значение X уменьшается на единицу. По таким хе правилам будет происходить в ычисле-- ние при движении точки в третьем квадранте в том же направлении. Во
О втором и четвертом квадрантах если U;; -0, то делается шаг вдоль оси X и вычисляется t iti.j Ь - +2xj + J,x, x. J (3), если же U;.0, то делается шаг вдоль оси У и вычисляются 5 Ui,j,,Ui|-2y. +1, () При движении по часовой стрелке стратегия меняется: в первом и третьем квадрантах вычисления ведутся по формулам (3) и (4), во втором и четвер20 том - по формулам (1) и (2).
В целях сокращения аппаратурных затрат и унификации вычислен в предлагаемом интерполяторе предлагается при шаге вдоль оси X новое значение оценочной функции всегда про ИЗВОДИТЬ по формуле ,; U, j+2X;+ .
+1 (5), а при шаге по оси У - по формуле Uj-,, Ui -2yj+l (6), что при названном определении оценоч ной функции соответствует движению в первом и третьем квадрантах по часовой стрелке. Предлагается также шаг вдоль оси X производить, если 0, а вдоль оси У, если U, j&0.
5 Такая стретегия требует изменения определения оценочной функции при переходе в четвертый и второй квадранты. Для этих квадрантов определим Uij RO-(х;+У р . Тогда вне круга
0 , внутри круга . При Ujj О для приближения точки к дуге окрз ности требуется сделать шаг вдоль оси X и вычислить и,-,, j Rjj-() - ( )+2xi-Uu-. +2x5-1 (7).
5 Это отличается от выражения (5) на 2, что легко получить действием 2(х;-1)+1. Иначе говоря, если X уменьшается, то вйачале следует текущее значение х уменьшить на
0 единицу, затем результат удвоить и увеличить- на единицу. Если же Uj:: П, то для приближения точки к дуге окружности следует сделать шаг вдоль оси У и вычислить Ujj, Ro t;
5 - (у; -1) (х +у )-2у. -1 и - (2у. + +1) (8). Это выражение отличается от (б) на -2 и его легко получить действием (у;-1) + . Иначе еели у увеличивается, то вычисления очередного значения оценочной функции при шаге по оси У текущее значение у берется уменьшенным на единицу. После удвоения значения к полученному результату прибавляется единица.
При интерполяции против часовой стрелки в первом и третьем квадрантах используются выражения (7) и (8Y во втором и четвертом - выражения (5) и (6). Автоматическая модификация оценочной функции позволяет сохранить без изменения структуры связи и состар вычислительного блока устройства.
Таким образом, для осуществления многоквадран1;ной круговой интер поляции принято: координаты начальной точки дуги (Хд, Yjj ) задаются со знаками; задается направление интер- пoляции координаты конечной точки дуги (xj,, ) задаются со знаками. В блоке программы по знакам (Хд,Уо) и направлению интерполяции устанавливаются начальные знаки выдачи приращений координа г, определяющие начальную установку триггеров 37 в блоках 14 и 15 вычисления приращений и начальную установку триггеров 29 в блоках 3 и 4 .управления реверсив ными счетчиками. Если при этом реверсивный счетчик 9 координаты х включился на вычитание, то при вводе значения х производится вычитание единицы. В реверсивном счетчике 10 координаты у, если он включается на сложение, вычитание единицы не производится, так как с Него будет сниматься отрицательное число. Далее в процессе интерполяции из реверсивного счетчика 9 с каждым шагом по оси X на сумматор 13 через блок 11 элементов И передается прямой код содержимого блока 9. Передача осуществляется со сдвигом на один разряд влево, что эквивалентно умножению на два, после чего на младший разряд сумматора 13 прибавляется единица. С каждым шагом по оси У на сумматор 13 с блока 10 через блок 12 передается со. сдвигом на один раз- ,ряд влево обратный код содержимого блока 10, после чего на младший разряд сумматора I3 добавляется единица, что даст значение 2 (yj-)+. В сум1маторе 3 вычисляется и накапливается текущее значение оценочной
функции. Переполнение сумматора означает, что оценочная функция становится положительной.
В процессе интерполяции признаком перехода границы квадранта является достижение одной из координат нулевого значения. При этом переполняется реверсивный счетчик соответствующей координаты. Сигнал переполнения используется для переключения триггеров 29 в инверсное предыдущее состояние, благодаря чему реверсивный счетчик, работавший на сложение, переключается в режим вычитания, а
второй реверсивный счетЧик - в режим сложения. Этот же сигнал изменяет на инверсное состояние триггера 37 блока вывода приращений другого координатного канала, а также изменяет состояние триггера знака координаты своего канала, так как после перехода через нулевое значение координаты меняет знак на обратный. Обработка дуги должна закончиться, когда совпадают значения и знаки координат текущей и конечной точек.
Еще одна особенность многоквадрантной круговой интерполяции методом оценочной функции связана с неявным
заданием радиуса интерполируемой окружности и округлением координат начальной точки дуги. В результате начальная точка дуги располагается S узле координатной сетки, шаг которой
совпадает с шагом интерполяции, и в общем случае не пренадлежит дуге радиуса R. Радиус-вектор этой точки по модулю равен л1х +Уо RO и в общем случае не является целочисленньгм
относительно шага интерполяции. В результате интерполируется дуга радиусом R. Как показало моделирование процесса интерполяции на ЭВМ при достижении границы квадранта, если R целочисленно, текущая точка имеет кoo fздftнaты по модулю (О, R,+ I) или
; (,0). Если не принять специальных мер, то в дальней1ием произойдет накопление ошибки и на границе оче- едного квадранта координаты текущей точки примут значение (Rg+2,0) или
0 ) и т.д. Кроме того, на границе квадранта значение оценочной функции всегда оказывается положительным. В связи со сменой выражения лля оценочной функции на границе квадранта первый шаг делается неверно, т.е. компенсация ошибки по радиусу не происходит.
Для устранения этого явления в предлагаемом интерполяторе в блоки
9и 10 реверсивных счетчиков введен по два дополнительных разряда, а в блоки 15 и 14 вычисления приращений делители на 4, Начальная установка делителей 00. В интерполяторе обрабатывается дуга радиуса 4R, а на выходе благодаря делению на 4 осуществляется пряведение к радиусу R. На границе квадранта, как и в случа интерполяции дуги радиуса R, достигается точка с координатами (0,4R-H или (4R+1,0), в сумматоре остается значение оценочной функции. Благода.ря установке делителей на 4 на выходы по координатам поступает точное число шагов. При достижении границы квадранта сигнал переполнения реверсивного счетчика сбрасывает делители в блоках 14 и 15, сбрасываются первые два разряда реверсивных счетчиков 9 и 10, а также сумматор 13, Таким образом, в интерполяторе устанавливаются величины, соответству- ющие точному положению точки на окружности радиуса 4R. Поэтому дальнейшее движение будет происходить точно.
Устройство работает в двух режи- мах.
В режиме линейной интерполяции от программы в блок 2 вводится команда Линейная интерполяция, в реверсивный счетчик 9 - величина Дх перемещение по оси X на участке интерполяции, в реверсивный счетчик
10- величина ду - перемещение по оси У на участке интерполяции, счетчики 5 и 6 сбрасываются, в блоки 14 и 15 вводятся начальные установки, соответствующие требуемым по программе направлением выдачи сигналов по осям X и У, сбрасываются делители
34 в блоках 14 и 15, сумматор 13 и триггер 17 формирователя знака оценочной функции,
С пуском устройства по линии 69 устанавливаются триггеры 32 в блоках 14 и 15 и по линии 40 подаются импульсы fj , частота которых определяет скорость интерполяции. Первый - импульс проходит через элемент И 19 формирователя 1, по S-входу устанавливает триггер 17 формирователя 1, элемент И 19 закрывается, элемент И 18 открывается. Кроме того, по ли- ,нии 42 этот импульс поступает иа вто
20
25
259218 8
рые входы блока элементов И 12, чем осуществляется передача дополнительного кода числа ду из блока 10 в сумматор-накопитель 13. В сумматоре 13 5 осуществляется сложение текущего значения оценочной функции с дополнительным кодом числа А у, т.е. образуется величина U;, U---Ay. Этот же тактовый импульс поступает на вход
10 блока 2 переключения, проходит через открытый элемент И 24 этого блока, по линии 45 поступает на счетный вход регистра-счетчика 5, а через элемент ИЛИ 25 блока 2 по линии 43 поступает
t5 на вход делителя 34 блока 14 вычисления перемещения по оси х). Второй тактовый импульс проходит через элемент И 18 формирователя 1 и по линии 41 поступает на блок 11 элементов И, осуществляя перенос в сумматор прямого кода содержимого реверсивного счетчика 9. В сумматоре вычисляется новое значение оценочной функции
25
О
0 5
5
0
5
и,;, Jitij Если результат сложения окажется положительным или нулевым, то сумматор переполняется, с выхода старшего его разряда сигнал переполнения по линии 62 сбрасывает триггер 17 формирователя 1, закрывая элемент И 18 и открывая элемент И 19. Тогда очередной тактовый импульс пойдет по пути первого.
Второй тактовый импульс поступает также на блок 2, проходит через элемент И 23, по линии 46 поступает на счетный вход регистра-счетчика 6 и через элемент ИЛИ 26 по линии 44 подается на делитель 34 блока 15 для выдачи по оси У. Попеременная выдача сигналов по указанным путям идет в.соответствии со знаком оценочной функции, причем каждый четвертый импульс, попадающий в выходной блок 14 или 15, появляется на выходе устройства, проходя через элемент И 35 и далее И 38, либо И 39.
Процесс интерполяции продолжается до получения в счетчиках-регистрах 5 и 6 чисел Дх и йу соответственно, т.е. когда содержимое счетчиков сравнивается с содержимым блоков 9 и 10 соответственно, это фиксир.у- ется блоками 7 и 8 сравнения кодов. Сигнал соответствующего блока сравнения по линии 54 или 55 сбрасывает триггер 32 в блоке 14 или 15, закрывается элемент И 35 блока 14 или 15, перекрывая канал выдачи прираще5
НИИ по оси X ипи у. При наличии сигналов от обоих блоков сравнения появляется сигнал на выходе элемента И 16, который подается в блок программы для ввода информации очередного кадра программы.
В режиме круговой интерполяции от программы в блок 2 вводится команда Круговая интерполяция, триг гер 20 блока 2 устанавливается, открывая элементы И 21 и 22, по линии 47 поступает разрешающий сигнал на третьи входы элементов И 30 и 31 блоков 3 и 4 управления реверсивными счетчиками. В блоках 3 и 4 по линиям 65 и 66 производится начальная установка триггера 29, соответству- гощая задаваемому режиму работы реверсивных счетчиков 9 и 10. В них вводятся координаты начальной точки дуги окружности (XQ, Уд) со знаками. В счетчики-регистры 5 и 6 вводятся координаты конечной точки дуги (хц, У() со знаками. В блоках 14 и 15 по линиях 67 и 68 осуществляется начальная установка триггеров 37, соответствующая заданным направлениям выдачи приращений по осям X и У соответственно, сбрасываются делители 34 .
С пуском устройства устанавливаются триггеры 32 в блоках 14 и 15 и подаются импульсы тактовой частоты на формирователь 1.
Первый импульс проходит через элемент И 19, устанавливает триггер 17 этого блока и по линии 42 поступает на вторые входы блока 12 элементов И. Производится пересылка со сдвигом на один разряд влево обратного кода содержимого реверсивного счетчика 10 в сумматор-накопитель 13, после чего на младший разряд сумматора прибавляется единица. Таким образом, ла сумматор засылается число (2уд+1), которое складывается с те- курщм значением оценочной функции. Этот же импульс с линии 42 поступает на BTopbte входы элементов И 30 и 31 блока 4 управления реверсивных счетчиков 10. В зависимости от состояния триггера 29 этого блока один из элементов И 30 и 31 открыт, второй закрыт. Проходя через открытый элемент И, импульс поступает на вход или - реверсивного счетчика 10, увеличивая или уменьшая на едяни ду его содержимое.
5921810
По линии 42 первый импульс поступает также в блок 2, где проходит через элементы И 22, RHH 26 и по линии 44 подается на вход делителя
5 34 блока 15 вычисления приращения координаты у. Прохождение сигнала .по цепям блока 15 остается таким же, как И в режиме линейной интерполяции. Второй тактовой импульс проходит
через элемент И 18 формирователя 1, по линии 41 через блок I1 осуществляет пересьшку со сдвигом на один разряд влево содержимого реверсивного счётчика 9 в сумматор 13 с последую 5 щим добавлением единицы на младший разряд сумматора. Далее через элементы И 30 и 31 блока управления реверсивным счетчиком 9 производится изменение содержимого реверсивного
20 счетчика на единицу. Кроме того, с линии 4 импульс такта поступает на элемент И 21 блока 2, проходит через него и элемент ИЛИ 25 и по линии 43 подается в блок 14 вычисления при ращений по оси X. Прохождение сигна- ла по цепям блока 14 остается таким же, как и в режиме линейной интерполяции.
После 3 асылки в сумматор 13 чйс30 ла 2X|j-t-l в сумматоре вычисляется
очередное значение оценочной функции, Если при этом сумматор переполняется, т.е. U, jjO., то сигнал переполнения по линии 62 сбрасывает триггер 17
35 блока I, Тогда очередной импульс такта пойдет по пути пе.рвого. Если же переполнения нет, то очередной импульс идет, по пути второго. Если заданная дуга окружности ле40 жит в -пределах одного квадранта, то подобная работа интерполятора происходит до сравнения кодов чисел в блоках 9, 5 и 10, 6 соответственно. Достижение равенства чисел фиксируется
45 блоками 7 и 8 сравнения кодов, сигналы которых производят такие же операции, как и в режиме линейной интерполяции.
Если же заданная дуга окружности - проходит через несколько квадрантов, то при достижении границы квадранта происходит следующее. Реверсивный счетчик, работавший на вычитание, при достижении О переполняется, 55 Сигнал переполнения по линии 60 (или 61) через элемент ИЛИ 27 блоков 3 и 4 управления реверсивным счетчиком изменяет состояние триггеров 29 этих
блоков на инверсное, переключая счет чики 9 и 10 в противоположный режим счета. Такие же переключения производятся в триггере 37 блока 14 или 15 (переключается только триггер в блоке своего координатного канала). Кроме того, по линии 60 (или 61) сбрасываются делители 34 блоков 14 и 15, обнуляется сумматор 13, через элемент ИЛИ 27 сбрасываются первые (младшие) два разряда реверсивных счетчиков 9 и 10 и переключается в инверсное состояние триггер знака в реверсивном счетчике своего канала. Интерполятор готов к обработ ке дуги в очередном квадранте.
формула изобретения
Линейно-круговой интерполятор, содержащий формирователь знака оценочной функции,сумматор-накопитель, связанный выходом с первым входом блока знака оценочной функции, и в каткдом координатном канале последова тельно соединенные реверсивный счетчик и блок элементов И, подключенный вторыми входами к выходу блока знака оценочной функции, а выходами - к разрядным входам сумматора-накопителя, отличающийся тем, что, с целью расширения функциональных возможностей и упрощения программирования, в него введены блок переключения, входы которого связаны с выходами формирователя знака оценочной функции, элемент И и в каждый координатный канал введены блок управления реверсивным счетчиком и последовательно соединенные регистр-счетчик, блок сравнения кодов и блок вычисления приращений, первый вход ко- 5 торого соединен с соответствующим входом элемента И, второй вход - с первыми выходами блока переключения, третий - с выходом реверсивного счетчика, с вторым входом сумматора-на- tO копителя, с первым входом блока управления реверсивным счетчиком каждого канала, с четвертым входом блока вычисления приращений соседнего канала, выходы блока вычисления при- t5 ращений соединены с первыми выходами линейно-кругового интерполятора, второй выход бЛока переключения подключен к первому входу регистра- счетчика, а третий выход - к третье20 му входу блока управления реверсивным счетчиком, четвертый вход которого соединен с соответствующим выходом формирователя знака оценочной функции, а выходы - с входами реверсив-
25 ного счетчика, выход элемента И подключен к второму выходу линейно-кругового интерполятора, первый вход которого соединен с вторым входом формирователя знака оценочной функ30 ции, вторые входы - с вторьтми входами блока переключения, третьи - с 1пятыми входами блока вычисления приращений, четвертый вход - с вто- рь1М входом регистра-счетчика а пя-
5 тый вход - с вторым входом реверсивного счетчика, вторые выходы ко- торого подключены к вторым входам блока сравнения кодов.
ifQ
Фщ.Ц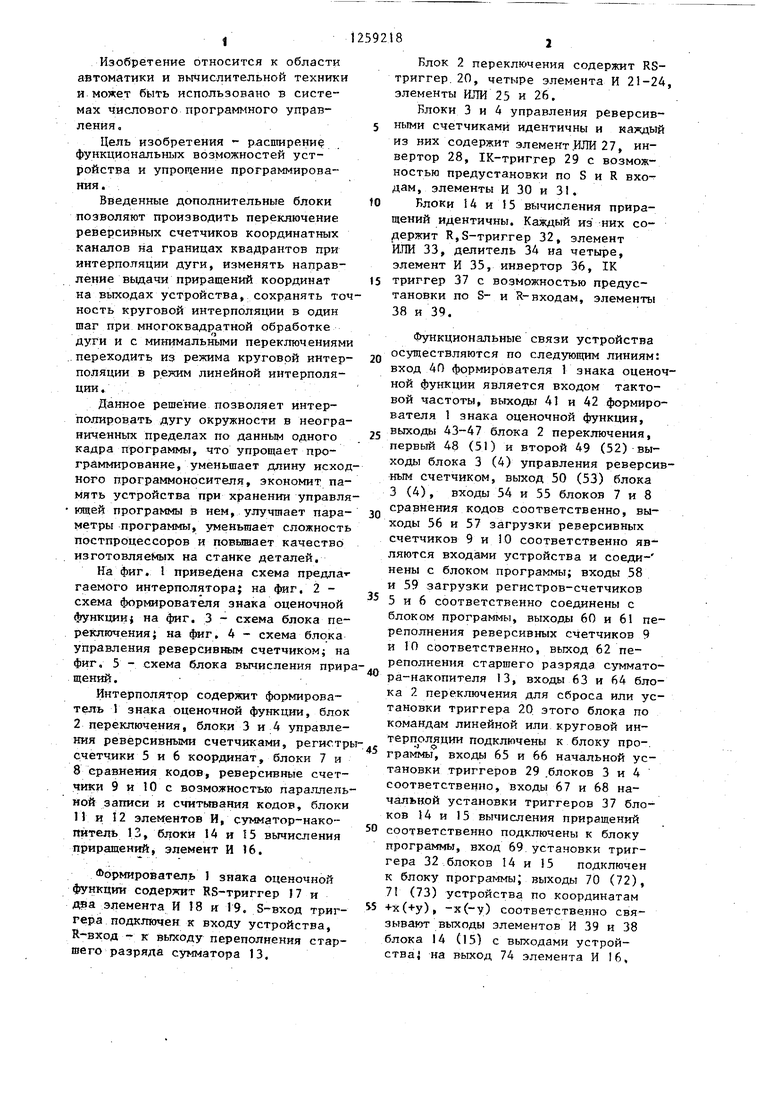
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1976 |
|
SU647653A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Круговой интерполятор | 1989 |
|
SU1665343A1 |
| Круговой интерполятор | 1980 |
|
SU875343A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Интерполятор с самоконтролем | 1985 |
|
SU1280576A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления. Цель изобретения - расширение функциональных возможностей и упрощение программирования. Линейно-круговой интерполятор содержит формирователь знака оценочной функции, блок переключения, блоки управления реверсивными счетчиками, регистры-счетчики координат, блоки сравнения кодов, реверсивные счетчики, блоки элементов И, сумматор- накопитель , блоки вычисления приращений, элемент И. Сущность изобретения состоит в том, что в линейно- круговой интерполятор, работакнций по методу оценочной функции, дополнительно введены блок переключения, блоки управления реверсивными счетчиками координат, peгиcтph -cчeтчики координат конечной точки, блоки сравнения кодов, блоки вьгеода приращений координат и элемент И. Указанные блоки с соответствующими связями осуществляют переключения в устройстве при переходе текущей точки дуги при круговой интерполяции из квадранта в квадрант и обеспечивают сохранение точности интерполяции в один шаг при многоквадрантной отработке дуги окружности. Благодаря автоматическому модифицированию оценочной функции на границах квадрантов основной блок интерполяции по сравнению с прототипом не усложняется. Изобретение может быть использоваио и в других областях, где необходимо задание движения рабочих органов по линейной или круговой траектории. 5 ил. (Л С
7f(73)
jomr
Составитель И.Ивец Редактор И.Дербак Техред Л.Олейник
Заказ 511.9/44 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
.5
Корректор А.Обручар
| Линейно-круговой интерполятор | 1977 |
|
SU741234A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Агурский М.С | |||
| и др | |||
| Числовое программное управление станками | |||
| М.: Машиностроение, 1966, с | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
