Устройство относится к системам автоматического контроля и регулирования.
Известны датчики угловых перемещений, содержащие безобмоточный зубчатый ротор, подвижный и неподвижный зубчатые статоры, измерительные обмотки, кольцевые магниты и встроенный обращенный электродвигатель.
Описываемое устройство отличается тем, что в нем зубчатый ротор выполнен полым и жестко связан с ротором обращенного электродвигателя, со статором которого л естко связан неподвижный статор датчика, причем кольцевые магниты и измерительные обмотки расположены в кольцевых пазах магнитных дисков, укрепленных на неподвижном валу, проходящем через центр датчика.
Такое выполнение устройства позволило повысить а мплитуду выходного напряжения, а следовательно, и точность его работы.
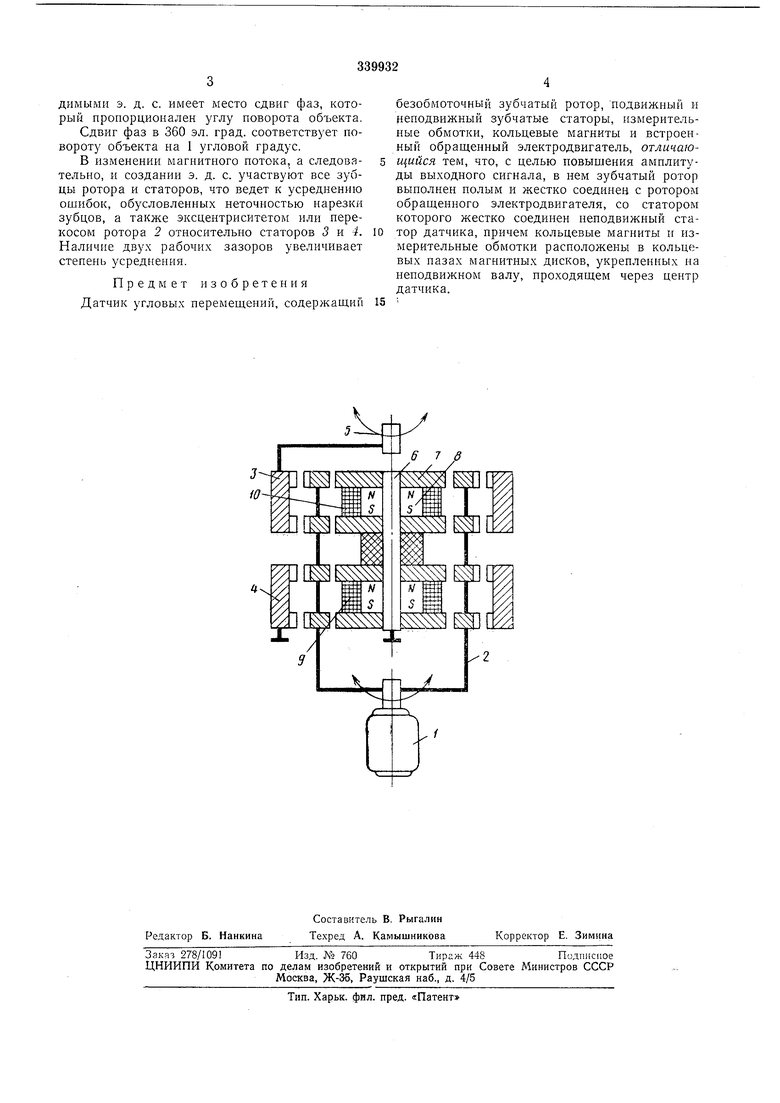
На чертеже приведено схематическое изображение описываемого устройства.
Оно содержит обращенный электродвигатель , ротор 2, подвижный статор 3, неподвижный статор 4, подвижный входной вал 5, неподвижный вал 6, магнитные диски 7, кольцевые магниты 8, измерительные обмотки 9 и 0.
на периодическим изменением магнитной проводимости в рабочем воздушном зазоре за счет перемещения зубчатой поверхности общего ротора 2 относительно поверхностей подвижного статора 5 и неподвижного статора 4, которые, как и ротор, имеют 360 зубцов.
Ротор 2 приводится во вращение встроенным обращенным электродвигателем /. Полый ротор двигателя жестко связан с общим ротором 2, а статор двигателя, имеющий двухфазную обмотку, питаемую напряжением с частотой 50 гц - с неподвпжным статором 4.
На неподвижном валу 6, выполненном из диамагнитного металла, смонтированы постоянные кольцевые магниты S, а также измерительные обмотки 9 VI 10, ъ которых при изг.генении магнитного потока индуктируется электродвижущая сила (э. д. с.). Подвижный статор 5 соединяется с поворотной частью и следуемого объекта.
При вращении ротора 2 в измерительных обмотках ,9 и 10 наводятся переменные э. д. с. одинаковой частоты.
Прн соответствующей установке подвижного статора 3 относительно ненодвижного статора 4 сдвиг фаз между наводимыми э. д. с. равен нулю. При повороте исследуелюго объекта, связанного через подвижный входной вал 5 с подвижным статором 3, между наводимыми э. д. с. имеет место сдвиг фаз, который пропорциоиален углу поворота объекта.
Сдвиг фаз в 360 эл. град, соответствует повороту объекта на 1 угловой градус.
В изменении магнитного потока, а следовательно, и создании э. д. с. участвуют все зубцы ротора н статоров, что ведет к усреднению ошибок, обусловленных неточностью нарезки зубцов, а также эксцентриситетом или перекосом ротора 2 относительно статоров 3 и i. Наличие двух рабочих зазоров увеличивает степень усреднения.
Предмет изобретения Датчик угловых перемещений, содержащий
безобмоточный зубчатый ротор, подвижный и неподвижный зубчатые статоры, измерительные обмотки, кольцевые магниты и встроенный обращенный электродвигатель, отличающийся тем, что, с целью повыщения амплитуды выходного сигнала, в нем зубчатый ротор выполнен полым и жестко соединен с ротором обращенного электродвигателя, со статором которого жестко соединен неподвижный статор датчика, причем кольцевые магниты н измерительные обмотки расположены в кольцевых пазах магнитных дисков, укрепленных на неиодвижном валу, проходящем через центр датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь углового положения вала в фазу | 1983 |
|
SU1091203A1 |
| Вентильный электродвигатель | 1980 |
|
SU972634A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2231202C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU858052A1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2653725C1 |
| МНОГОСЛОЙНЫЙ ТОРЦЕВОЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2356158C1 |
| МНОГОСЛОЙНЫЙ ТОРЦЕВОЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2251784C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
