Изобретение относится к электротехнике и может быть использовано в качестве источника энергии для электропривода.
Известен электродвигатель, встроенный в колесо транспортного средства, содержащий статор с магнитопроводом, жестко закрепленный на оси, на который с возможностью вращения относительно статора установлен ротор, также снабженный магнитопроводом, электромагниты, установленные на роторе, постоянные магниты, установленные на статоре, и средство перекоммутации питания электромагнитов, выполненное в виде распределительного коллектора, а также средства токосъема в виде щеток, контактирующих с пластинами коллектора (патент СССР № 1725780, МПК6 Н 02 К 23/00, 1989).
Основным недостатком указанной конструкции является то, что наличие коллектора усложняет конструкцию двигателя, уменьшает его ресурс и надежность.
Наиболее близким решением является электродвигатель, содержащий статор с электромагнитами, закрепленный на оси, и ротор с постоянными магнитами с чередующейся полярностью, имеющий возможность вращения относительно этой оси. Электромагниты установлены напротив постоянных магнитов, по крайней мере, двумя группами таким образом, что в каждой группе угловое рассогласование между осями двух электромагнитов кратно угловому расстоянию между постоянными магнитами. Группы смещены относительно друг друга таким образом, что, когда оси электромагнитов одной группы совпадают с осями противолежащих постоянных магнитов, оси электромагнитов других групп не совпадают. На статоре установлен датчик угла поворота ротора, выполненный в виде электромагнита, а на роторе установлены зонды в виде стержней из ферромагнитного материала. Датчик угла поворота ротора соединен со средствами перекоммутации питания электромагнитов, выполненными в виде электронного инвертора (патент РФ №2153757, МПК7 Н 02 К 29/06, 1997).
Однако смещение групп электромагнитов, являющихся по существу зубцами статора двигателя, на угол, меньший полюсного деления, ведет к несимметрии конструкции статора, неполному использованию его объема и материала и, как следствие, ухудшает энергетические показатели, усложняет технологию изготовления. Кроме того, в двигателе-прототипе угловой размер полюсов, сформированных электромагнитом и постоянным магнитом, одинаковые, следовательно, границу между полюсами одновременно проходят все зубцы и реактивные моменты от взаимодействия каждого полюса электромагнита и постоянного магнита суммируются, что ведет к возникновению большого суммарного реактивного момента двигателя и неравномерности его вращения. Применение постоянных магнитов высоких удельных энергий в виде отдельных кусков для возбуждения ротора приводит к необходимости их установки на индуктор в намагниченном состоянии, что технологически достаточно сложно. Наличие дополнительного электромагнита и ферромагнитных зондов для получения информации об угле поворота ротора усложняют конструкцию электродвигателя. При размещении электронного коммутирующего устройства вне двигателя от него приходится подводить токоподводы к силовым обмоткам и датчику положения ротора. При числе фаз три и более число токоподводов оказывается большим. При обращенной конструкции двигателя, рассматриваемой в прототипе, они должны быть проведены чрез ось, что уменьшает ее прочность и требует увеличения диаметра.
Задачей, на которую направлено настоящее изобретение, является повышение энергетических показателей двигателя и упрощение конструкции.
Поставленная задача решается тем, что в электродвигателе, содержащем жестко закрепленный на оси зубчатый статор, ротор, имеющий возможность вращения относительно этой оси, и размещенный по его периферии магнитопровод, жестко связанные со статором датчики положения ротора, число которых равно числу фаз двигателя, а также электронное коммутирующее устройство, вход которого связан с выходами датчиков положения ротора, согласно изобретению зубцы статора равномерно распределены по его окружности, их количество кратно удвоенному числу фаз двигателя, а на каждом зубце намотана обмотка, на поверхности магнитопровода, обращенной к статору нанесен сплошной слой магнитного материала из магнитопласта, на котором сформированы магнитные полюса с чередующейся полярностью намагничения и количеством, отличным от количества зубцов статора на два, при этом датчики положения ротора выполнены на основе гальваномагнитного элемента и закреплены в воздушном зазоре между статором и ротором, а электронное коммутирующее устройство установлено на статоре.
Датчики положения ротора могут быть закреплены в воздушном зазоре между зубцами статора или между зубцами статора и магнитным материалом магнитопровода.
Равномерное расположение зубцов статора по окружности с числом зубцов, кратным удвоенному числу фаз, позволяет выполнить конструкцию статора симметричной и осуществлять полное использование обмотки, когда в каждый момент времени ток может протекать по обмоткам всех зубцов. Изготовление ротора с числом полюсов (2р), на два меньшим или большим, чем число зубцов статора (Z), позволяет, во-первых, обеспечить в двигателе электрическую редукцию, когда частота вращения ротора оказывается в k раз ниже частоты вращения поля статора, где k определяется по выражению
k=(Z-2p)/2p.
Это обстоятельство очень важно для низкооборотного привода транспортных средств. Во-вторых, неравенство числа Z и 2р позволяет существенно уменьшить реактивный момент в двигателе по сравнению с прототипом, так как здесь через границу между полюсами одновременно проходит только одна пара зубцов.
Нанесение на магнитопровод ротора сплошного слоя из магнитопласта позволяет сформировать нужное количество полюсов на роторе с помощью технологического индуктора, что существенно упрощает технологию изготовления ротора, так как не требует закрепления намагниченных полюсов при сборке ротора.
Использование в качестве датчика положения ротора гальваномагнитного элемента, например, датчика Холла, позволяет упростить конструкцию двигателя, так как из-за малых габаритов датчик Холла довольно просто устанавливается между зубцами или в специальное углубление в зубце и одновременно с этим отпадает необходимость в сигнальном элементе датчика (в прототипе это ферромагнитный зонд), так как датчик Холла реагирует на поток, создаваемый рабочими магнитами.
Установка электронного коммутирующего устройства внутри двигателя на ступице статора позволяет резко уменьшить число внешних токоподводов к двигателю. Действительно, в этом случае к электронному коммутирующему устройству независимо от числа фаз через ось двигателя должно быть подано только силовое питание - два токоподвода, и два токоподвода управляющих сигналов - регулирование скорости (момента) и реверс. Тогда как в двигателе- прототипе минимальное требуемое число токоподводов для трехфазного двигателя составит девять.
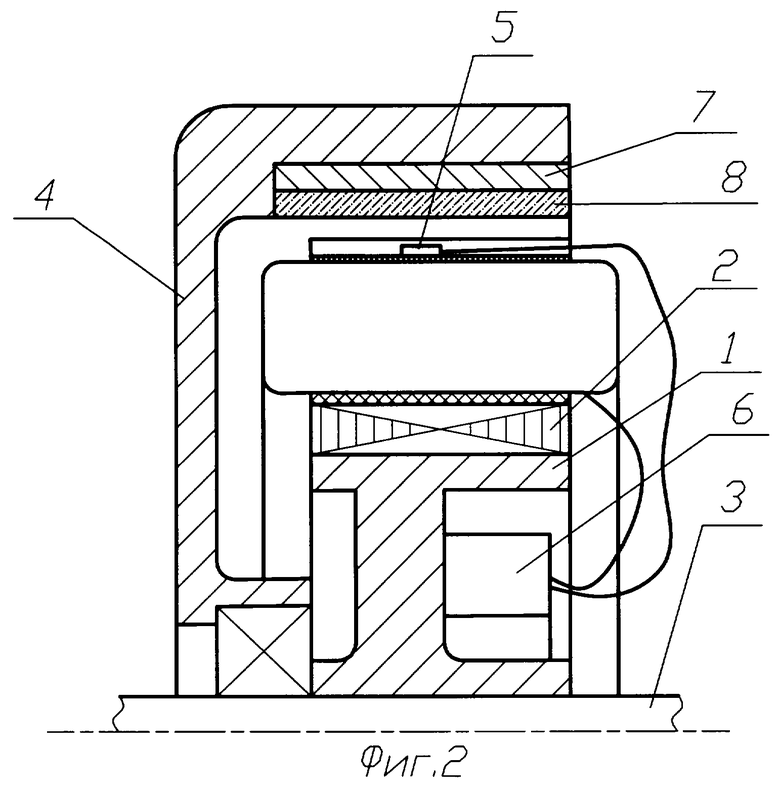
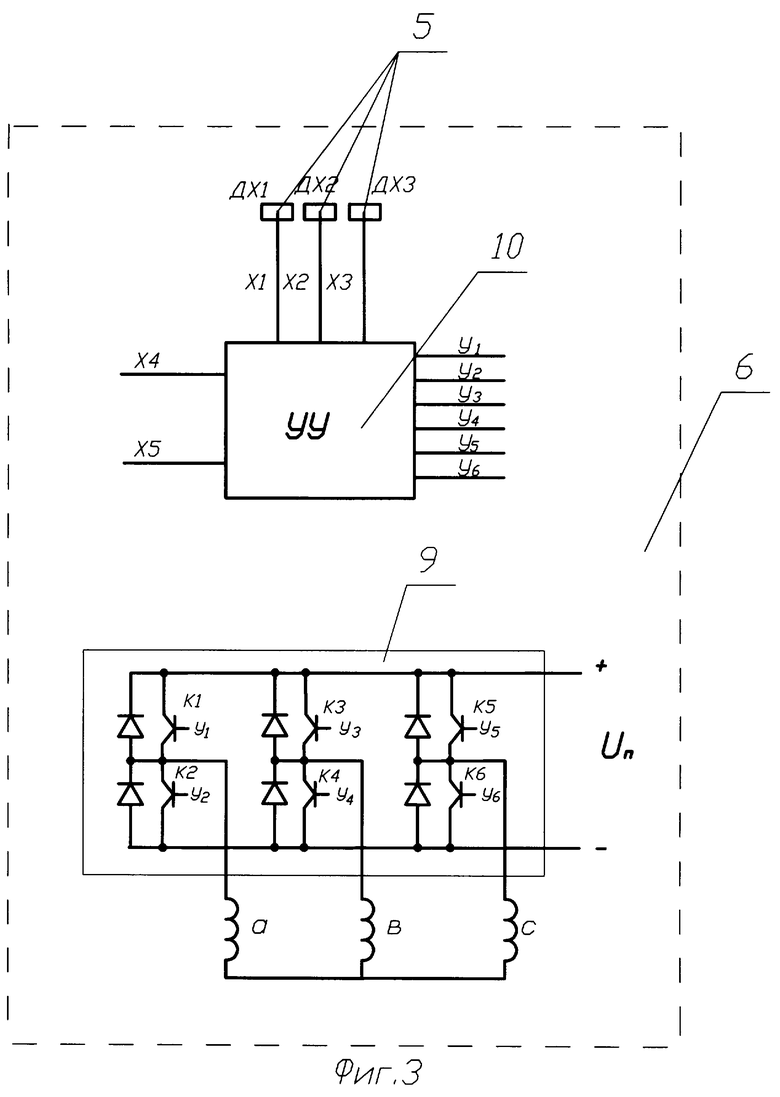
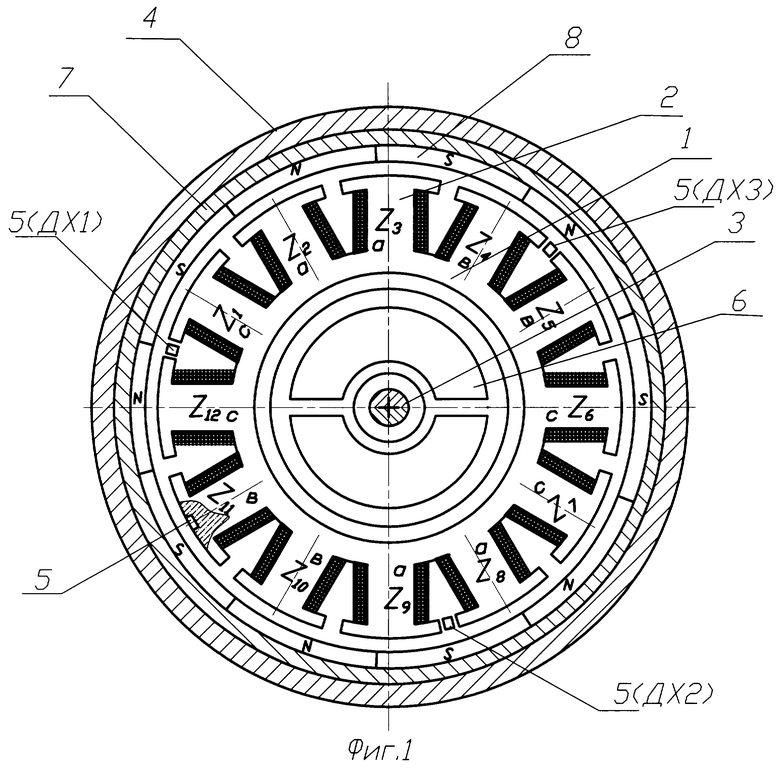
Сущность изобретения поясняется чертежами, где на фиг.1 изображен электродвигатель, вид сбоку; на фиг.2 - то же, разрез А-А; на фиг.3 - функциональная схема электронного коммутирующего устройства.
Электродвигатель содержит зубчатый статор 1 с числом зубцов 2, кратным удвоенному числу фаз двигателя, жестко закрепленный на оси 3. На этой же оси 3 установлен ротор 4, имеющий возможность вращения относительно этой оси. В воздушном зазоре между статором и ротором, между зубцами 2 статора 1 установлены датчики 5 положения ротора 4, выполненные на основе гальваномагнитного элемента, например датчика Холла, а на ступице статора 1 крепится электронное коммутирующее устройство 6. На каждом зубце 2 статора 1 намотана обмотка, а по периферии ротора имеется магнитопровод 7, на который нанесен слой магнитного материала из магнитопласта 8, из которого до сборки двигателя сформировано четное количество магнитных полюсов ротора с чередующейся полярностью, число которых на два меньше числа зубцов статора 1. Выходы датчиков 5 положения ротора 4 связаны со входом электронного коммутирующего устройства 6. Кроме того, датчики 5 могут быть установлены в воздушном зазоре между зубцами 2 статора и магнитным материалом 8 магнитопровода.
Окружность статора 1 разделена на фазные зоны. На каждую фазную зону приходится число зубцов Zф=Z/m, где Z- общее число зубцов на статоре, m- число фаз. Фазная зона в свою очередь разделена на две одинаковые группы зубцов, сдвинутых на 180 геометрических градусов. Обмотки на зубцах в каждой фазе могут быть соединены последовательно или параллельно с противоположным направлением потока в соседних зубцах. Направление потока в зубцах, сдвинутых на 180 геом. градусов, также должно быть противоположным. Фазные обмотки могут быть соединены по разомкнутой схеме (звезда), замкнутой (треугольник или многоугольник), или каждая фаза может питаться от собственного инвертора.
Электронное коммутирующее устройство 6 содержит m-фазный инвертор напряжения 9 и управляющее устройство 10, которое по сигналам с датчиков 5 положения ротора (x1, x2, x3 - фиг.3) формирует импульсы управления ключами инвертора 9 (y1, y2, y3, y4, y5, y6 - фиг.3) и может быть выполнено на стандартных микросхемах.
Работу двигателя поясним на примере трехфазного двигателя с числом зубцов Z=12 и числом полюсов 2р=10 (фиг.1). Фазные обмотки намотаны на зубцах с соответствующими обозначениями (а, в, с). Датчики 5 положения ротора 4 сдвинуты по расточке статора на 120 геометрических градусов. Условимся, что, если датчик положения находится под северным полюсом, с его выхода поступает единичный сигнал, а если под южным, то нулевой. Предположим, что первоначальное положение ротора относительно статора соответствует изображенному на фиг.1 и ротор вращается против часовой стрелки, т.е. в рассматриваемом случае датчик Д1 только что перешел с северного полюса на южный. На его выходе установился нулевой сигнал Д1 - 0, а на других датчиках имеем Д2 - 0, Д3 - 1. Схема управляющего устройства 10 построена таким образом, что при такой комбинации сигналов на выходе датчиков положения ротора 5, путем соответствующего подключения фазных обмоток с помощью инвертора напряжения 9 к источнику постоянного тока, на зубцах статора Z2, Z4, Z9 и Z11 сформировался южный полюс, а на зубцах Z3, Z5, Z8 и Z10 - северный. Перечисленные зубцы соответствуют фазам “а” и “в”. Обмотка фазы “с”, намотанная на оставшихся зубцах, оказалась обесточенной. В результате взаимодействия магнитных полей статора и ротора возникает электромагнитный момент, стремящийся повернуть ротор против часовой стрелки. Нетрудно заметить, что после поворота ротора на угол Δ=360/(kNk)=12°, где kNk=2m=6 - количество переключении фазной обмотки при перемещении ротора на 360 электрических градусов или тактность коммутации [1], граница между полюсами ротора пройдет под датчиком Д2. В результате на его выходе изменится сигнал и может иметь место комбинация сигналов на выходе датчиков: Д1 - 0, Д2 - 1, Д3 - 1. Этой комбинации сигналов будет соответствовать такое подключение фазных обмоток двигателя, при котором на зубцах Z5, z7, Z10 и Z12 сформируется северный полюс, а на зубцах Z1, Z4, Z6, Z11 - южный полюс. В результате взаимодействия между магнитными полюсами ротора и статора сохранится момент, поворачивающий ротор против часовой стрелки. Аналогичное переключение происходит после поворота ротора на следующие 12 геометрических градусов, в результате которого вектор поля дискретно перемещается на угол 60 электрических градусов, т.е. в двигателе осуществляется шеститактная коммутация [1]. Можно выбрать алгоритм коммутации обмотки двигателя и таким, что на каждом такте к источнику питания будут подключены все три фазы [1]. При этом, если число зубцов статора окажется не кратным четырем, датчики Холла устанавливают по центру зубцов 2 в воздушном зазоре между магнитом и зубцом, например в специально выполненном углублении в зубце (на фиг.1 показано пунктиром).
В роторе двигателя в процессе изготовления на магнитопровод наносится сплошной слой магнитопласта и затем с помощью технологического индуктора осуществляется формирование магнитных полюсов. Такая технология эффективна при использовании магнитных материалов высоких удельных энергий, например, Fe NdB, так как при существующей технологии изготовления магниты в виде магнитокерамических призм в намагниченном состоянии крепят на магнитопровод. Во-первых, магнитокерамика значительно дороже магнитопласта и, во-вторых, операция крепления, например, приклеивания, намагниченных призм чрезвычайно сложна.
Поскольку низкооборотные моментные двигатели, к которым относится и заявляемый двигатель, имеют плоскую конструкцию, т.е. наружный диаметр значительно больше длины, то на ступице статора имеется достаточно места, на которое и устанавливается электронное коммутирующее устройство 6. При этом сама ступица может быть использована как радиатор для силовых ключей коммутирующего устройства. В результате, укорачиваются провода связи коммутирующего устройства 6 с фазными обмотками и датчиками 4 положения ротора, а число внешних токоподводов к двигателю, проходящих внутри оси, независимо от числа фаз двигателя сокращается до четырех (фиг.3): два - ± силовое питание Uп, один - широтно-имульсное регулирование момента x4, один - реверс x5.
Электродвигатель наиболее эффективен для применения в низкооборотном безредукторном приводе транспортных средств, например, в инвалидных колясках, электрокарах и т.п.
Источники информации
1. С.Г. Воронин. Управляемый электропривод: Конспект лекций. Челябинск, ЧГТУ, 1996. - 4.2.
Изобретение относится к области электротехники и может быть использовано в качестве источника энергии для электропривода, в частности в низкооборотном безредуктором приводе транспортных средств, например в инвалидных колясках, электрокарах и т.п. Сущность изобретения состоит в следующем. Электродвигатель содержит зубчатый статор, жестко закрепленный на оси, и ротор, имеющий возможность вращения относительно этой оси. По периферии ротора размещен магнитопровод, а на статоре расположены жестко связанные с ним датчики положения ротора, число которых равно числу фаз двигателя, а также электронное коммутирующее устройство, вход которого связан с выходами датчиков. Зубцы статора равномерно распределены по окружности, их количество кратно удвоенному числу фаз двигателя, а на каждом зубце намотана обмотка. На поверхности магнитопровода, обращенной к статору нанесен сплошной слой магнитного материала из магнитопласта, в котором сформированы магнитные полюса с чередующейся полярностью намагничения, их количество отличается от количества зубцов статора на два. Датчики положения ротора выполнены на основе гальваномагнитного элемента и закреплены в воздушном зазоре между статором и ротором, а электронное коммутирующее устройство установлено на статоре. Датчики положения ротора могут быть закреплены в воздушном зазоре между зубцами статора или между зубцами статора и магнитным материалом магнитопровода. Технический результат состоит в улучшении электрических показателей электродвигателя и упрощение его конструкции. 2 з. п. ф-лы, 3 ил.
| ЭЛЕКТРОДВИГАТЕЛЬ | 1997 |
|
RU2153757C2 |
| SU 1725780 А, 07.04.1992 | |||
| Мотор-колесо | 1971 |
|
SU628008A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| 1972 |
|
SU433479A1 | |

