() ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU847452A1 |
| Вентильный электродвигатель | 1980 |
|
SU1120459A1 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2025872C1 |
| Вентильный электродвигатель с тахометрическим генератором | 1985 |
|
SU1419531A3 |
| Шаговый электродвигатель | 1985 |
|
SU1427514A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| Совмещенный синхронный двигатель-тахогенератор | 1980 |
|
SU930513A1 |
| Вентильный электродвигатель | 1977 |
|
SU675544A1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
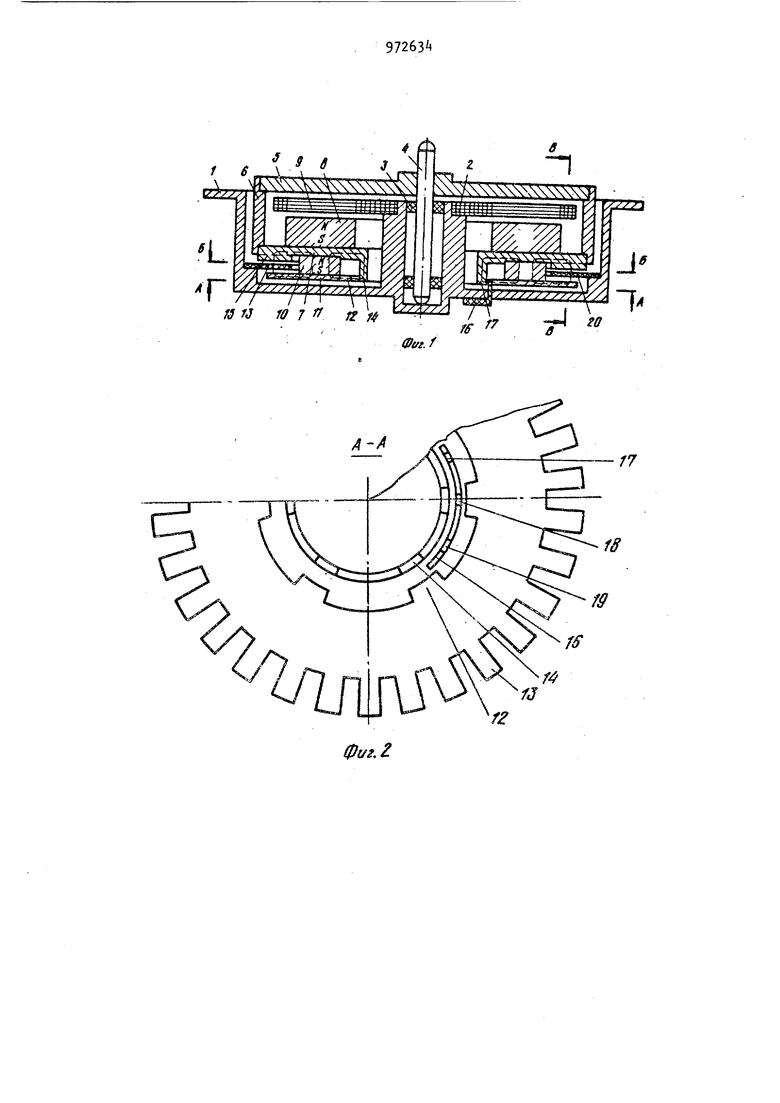
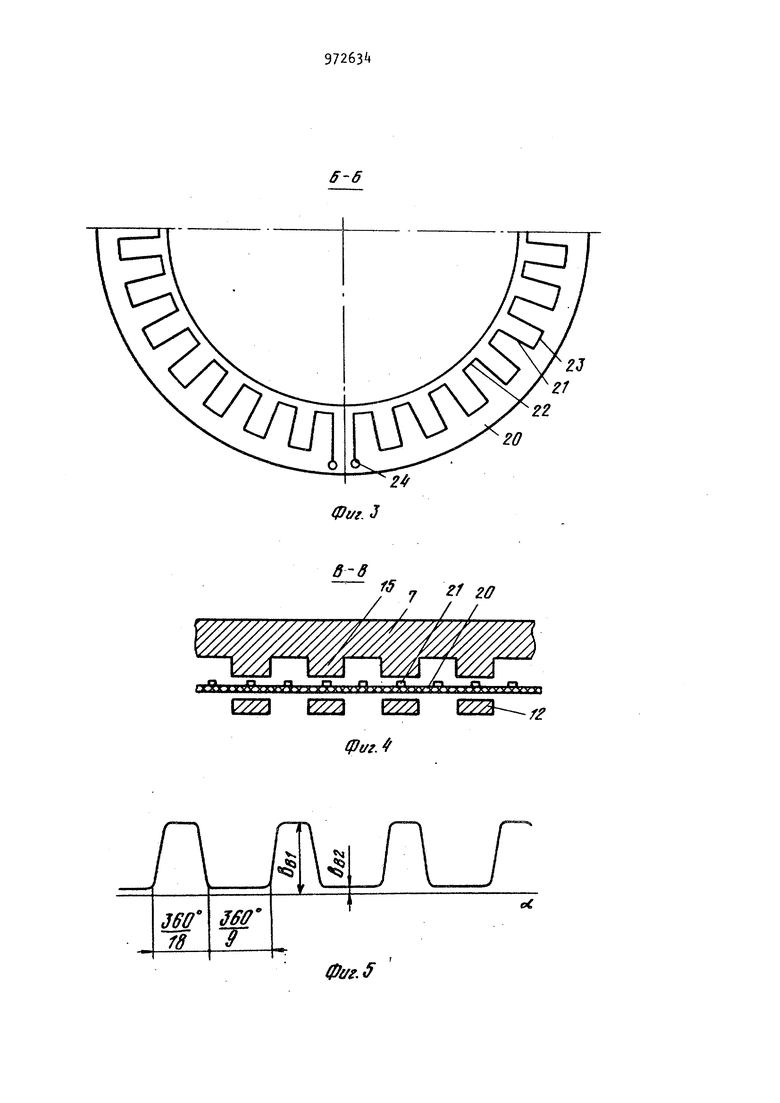
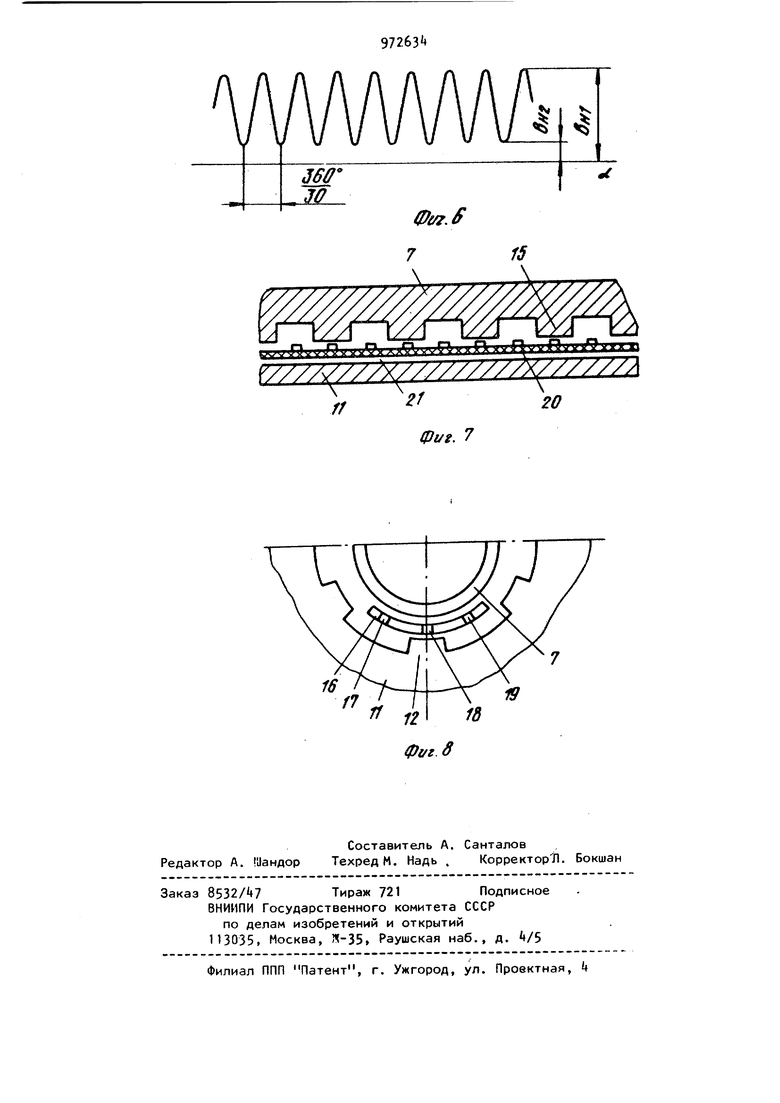
. Изобретение относится к электротехнике и может быть применено при разработке электрических машин малой мощности,например бесконтактных элек тродвигателей постоянного тока с встроенным тахогенератором, применяемых в качестве приводных электро двигателей лентопротяжных механизмов проигрывателей с прямым приводом, систем автоматики и т.д. Известны бесконтактные электродвигатели постоянного тока с встроенными тахогенераторами, которые со держат три постоянных магнита с соответствующими магнитопроводами. Од магнит создает основное магнитное поле, другой управляет чувствительными элементами датчика положения ротора, третий применен в качестве индуктора для датчика частоты вращения Cl 3Практически каждое устройство представляет собой отдельную электрическую машину, вследствие чего электродвигатель в целом имеет сложную конструкцию и значительные размеры, особенно в осевом направлении, что составляет основные недостатки данного электродвигателя. Наиболее близким к предлагаемому является вентильный электродвигатель, ротор которого содержит зубчатый магнитопровод, к которому прикреплены два кольцевых постоянных магнита - один для создания основного магнитного потока, другой для создания необходимых для датчика положения и тахогенератора магнитных потоков. Таким образом, один постоянный магнит является общим для тахогенератора и датчика положения ротора, и один магнитопровод является общим для обоих постоянных магнитов. Для создания переменного магнитного поля, необходимого для работы тахогенератора, в магнитопроводе ротора и в магнитопроводе статора имеются соответствующие зубцы. Часть магнитного потока общего магнита проходит через располагающиеся на статоре магнитодиоды, магнитопроводы статора и ротора. Количество постоянных магнитов зависит от числа пар полюсов и фаз электродвигателя. Таким образом, необходимое для работы датчика положения переменное магнитное поле создано несколькими постоянными магнитами и в действительности общим для тахогенератора и датчика положения ротора является не один постоянный магнит, а несколько постоянных магнитов 2 . Недостатком этого электродвигателя является то, что только один магнитопровод общего магнита установлен на роторе, а другой магнитопровод установлен на статоре, т.е. является неподвижным. При вращении ротора возникает пульсирующее ма1- нитное поле, что вызывает в указанном магнитопроводе дополнительные потери. Это в свою очередь приводит к уменьшению КПД, а также к снижению равномерности вращения ротора электродвигателя. К числу недостатков следует также отнести то обстоятель ство, что из-аа зубцов в магнитопро водах магнитный поток через магнито диоды является также пульсирующим, дулированным частотою тахогенератор i что усложняет работу датчика положения и соответствующей схемы коммутации. Целью изобретения является улучшение электромеханических параметров .КПД и равномерности вращения ). Поставленная цель достигается те что к указанному общему постоянному магниту примыкает .магнитопровод, ус тановленный относительно ярма с зазорами, причем поверхность одного и элементов, образующая зазоры, выпол нена зубчатой, в одном зазоре неподвижно установлены чувствительные элементы датчика постоянного режима а в другом - обмотка тахогенератора Поверхность другого элемента, образующего зазоры, выполнена зубчатой, при этом их выступы и впадины расположены соответственно напро тив друг друга.; Поверхность кольцевого магнитопр вода, обращенная к ярму, выполнена 9 4 убчатой, а поверхность ярма - гладой. Кроме того, поверхность кольцевоо магнитопровода,обращенная к ярму, ыполнена гладкой, а поверхность рма - зубчатой. Сущность изобретения поясняется а примере вентильного электродвигателя постоянного тока плоского исполнения с дисковой обмоткой статора, с возбуждением от постоянных магнитов . На фиг. 1 представлен электродвигатель, осевой разрез; на фиг. 2 конфигурация магнитопровода и расположение датчика положения, разрез А-А на фиг.1; на фиг. 3 - обмотка датчика скорости, разрез Б-Б на фиг.1; на фиг. - расположение обмотки датчика скорости и зубчатого магнитопровода разрез В-В на фиг.1; на фиг. 5 - форма магнитного поля во внутреннем зазоре; на фиг. 6 - форма магнитного поля в воздушном зазоре; на фиг. 7 расположение обмотки датчика скорости и гладкого магнитопровода, вариант; на фиг. 8 - расположение датчика положения и гладкого ярма, вариант. Электродвигатель состоит из корпуса 1, выполненного заодно с цилиндрической втулкой 2,внутри которой в подшипниках 3 установлен вал k. К валу прикреплено дискообразное магнитное ярмо 5, к которому через кольцо 6 прикреплено второе магнитное ярмо 7 сложной конфигурации. К одной торцовой поверхности последнего прикреплен кольцевой постоянный магнит 8. Постоянный магнит намагничен в аксиальном направлении так что на торцовой поверхности магнита образованы магнитные полюса с чередующейся полярностью. В зазоре между магнитом 8 и ярмом 5 располагается дисковая обмотка статора 9 которая прикреплена к внутренней торцовой поверхности втулки 2, выполненной ступенчатой. К другой стороне ярма 7 прикреплен одной торцовой поверхностью дополнительный постоянный магнит 10, который намагничен в аксиальном направлении так, что одна торцовая поверхность магнита имеет одну полярность, а другая - противоположную полярность. К другой торцовой поверхности дополнительного магнита 10 прикреплен кольцевой магнитопровод 11, по внутренней цилиндрической поверхности которого выполнены, например, шесть зубцов 12 и на наружной цилиндрической поверх ности - например, тридцать зубцов 13 По внутренней поверхности ярма 7 выполнены шесть зубьев 1, а на наружной поверхности имеются тридцать выс тупов 15. Ярмо 7 и магнитопровод 11 установлены так, что зубцы на внутренних поверхностях (12 и If соответственно ) и на наружных поверхностях (15 и 13 ) располагаются, напро тив друг друга. Таким образом, допол нительный постоянный магнит 10, ярмо 7 (с зубцами Т и 15) и магнитопровод 11 (с зубцами 12 и 13) образуют разомкнутую магнитную цепь с двумя воздушными зазорами; пути магнитного потока показаны на фиг,1 прерывистыми линиями. Вр внутреннем возду ном зазоре установлено основание 1б датчика положения ротора, выполненное с дугообразным выступом, к которому прикреплены, например, три чувс вительных элемента 17, 18 и 19. В ка честве указанных элементов можно при менять магнитодиоды, магниторезисторы, датчики Холла, ферритовые коль ца датчика трансформаторного типа и др. В корпусе 1 выполнена дугообразная щель, в которой установлен дугообразный выступ основания 1б. Углова ширина упомянутой щели больше,чем шири на выступа,чем обеспечивается возмож.ность перемещения датчика положения в определенных пределах при настройке электродвигателя.В наружном воздушном зазоре установлено основание 20 с тахометрической обмоткой тахогенератора. Тахогенератор (.фиг.З) представляет собой тонкостенное кольцевое основание 20, к поверхности которого прикреплена зигзагообразная тахометрическая обмотка 21, состоящая, например, из шестидесяти радиальных проводников, которые соединены последовательно при помощи дугообразных проводников - внутренних 22 и наружных 23. Выводные концы обмотки 21 выполнены в виде клемм . Тахометрическая обмотка может быть выполнена из единой металлической полосы например, печатным способом или ;штамповкой. Возможен и другой вариiaHT (не показан), согласно которому на основании 20 выполнены пазы, в которых размещены проводники тахометрической обмотки; путем применения изолированного обмоточного провода в указанных пазах можно размещать несколько проводников, благодаря чему увеличивается выходной сигнал тахогенератора. Электродвигатель работает следующим образом. Обмотка статора 9 подключается к источнику питания через электронный блок, который коммутирует секции обмотки статора по сигналам управления, поступающим с датчика положения ротора. Вращающий момент возникает в результате взаимодействия токов обмотки статора с магнитным полем основного магнита 8. Ввиду того, что ярмо 7 и магнитопровод 11 имеют зубчатую конфигурацию, магнитная индукция в зазорах, в которых установлены датчики положения и тахогенератор, меняется периодически по окружности. Во внутреннем зазоре индукция меняется от значения Bg (фиг.5 ) с периодом 60°, а в наружном зазоре - от значения периодом 12(фиг.6 /. При положении ротора, показанном на фиг.2, магнитопровод 18 располагается в сильном магнитном поле Bg, а магнитодиоды 17 и 19 в слабом поле BgQi. В таком положении выходной сигнал поступает с чувствительного элемента 17, а выходные сигналы с других элементов отсутствуют. Такое положение существует при повороте ротора на +10. Затем поступает сигнал со следующего элемента (например, с элемента 17 при повороте ротора по часовой стрелке) и т.д. Таким образом, на выходе датчика положения имеются последовательности сигналов, которые зависят от положения ротора в отношении неподвижных секций обмотки статора и которые через электронный блок коммутируют данные секции. При вращении магнитопровода 11 магнитное поле, которое существует в наружном зазоре (фиг.6), наводит радиальных проводниках 21 (фиг.4) тахометрической обмотки переменный игнал, частота которого пропорциональна частоте вращения ротора. В электродвигателе,.конструкция оторого изображена на фиг.1, наужный воздушный зазор выполнен плосим, а внутренний - радиальным, при 7 этом как магнитопроаод 11, так и яр мо 7 имеет зубчатую конструкцию. Однако возможны и другие варианты конструкции электродвигателя, пр которых оба зазора выполнены либо радиальными, либо плоскими или вну ренний зазор выполнен плоским, а на ружный зазор радиальным. Переменные магнитные поля в зазорах, необ ходимые для работы датчиков, воз;Никают и при таких вариантах, при которых только одна поверхность ( ли бо ярма, либо магнитопровода ) имеют в зоне воздушных зазорав зубчатую конфигурацию, а обращенные к ним другие поверхности выполнены гладки ми. Так на фиг. 7 изображен упрощенный вариант, при котором ярмо 7 имеет в зоне наружного воздушного зазора зубцы, а магнитопровод 11 им ет гладкую поверхность. На фиг. 8 изображен вариант, где поверхность ярма 7 выполнена гладкой, а поверхность магнитопровода 11 - зубчатой (зубцы 12 ). Таким образом, в данном электродвигателе вращаются как ярмо, так и магнитопровод, между которыми установлен общий постоянный магнит. Магнитный поток в ферромагнитных элементах является постоянным, и ни каких дополнительных потерь в стали и пульсирующего реактивного момента, вызывающего неравномерность час тоты вращения, при вращении ротора не возникает. Поток через магнитодиоды определяется только конфигура цией магнитного поля в зоне их расп ложения, а влияние работы тахогенератора на выходные сигналы датчика положения отсутствует. В качестве общего постоянного магнита можно применять лишь один постоянный ма1 нит с простой конфигурацией. Указанные,преимущества особенно существенны в прецизионных тихоходных электродвигателях прямого привода проигрывателей, в которых возникновение дополнительных потерь и неравномерность вращения ротора являются крайне нежелательными явлениями. Формула изобретения 1.Вентильный электродвигатель, содержащий статор, ротор с постоянным магнитом и ярмом, датчик положения ротора с магниточувствителы ными элементами, тахогенератор, прикрепленный к ярму общий для тахогенератора и датчика положения ротора постоянный магнит, отличающийся тем, что, с целью повышения КПД, улучшения равномерности вращения ротора, к указанному общему постоянному магниту примыкает магнитопровод, установленный относительно ярма с зазорами, причем поверхность одного из элементов, образующая зазоры, выполнена зубчатой, в одном зазоре неподвижно установлены чувствительные элементы датчика постоянного режима, а в другом - обмотка тахогенератора. 2.Электродвигатель по п.1, отличающийся тем, что поверхность другого элемента,-, образующего зазоры, выполнена зубчатой, при.этом их выступы и впадины расположены соответственно напротив друг друга. 3.Электродвигатель.по п.1, отличающийся тем, что поверхность кольцевого магнитопровода, обращенная к ярму, выполнена зубчатой, а поверхность ярма - гладкой. 2. Электродвигатель по п.1, о т личающийся тем, .что поверхность кольцевого магнитопровода, обращенная к ярму, выполнена гладкой, а поверхность ярма - зубчатой. Источники информации, принят1 1е во внимание при экспертизе 1.Овчинников И. Е. и др. Бесконтактные двигатели постоянного тока. Н., Наука, 1979, с. 230-2332.Авторское свидетельство СССР по заявке tf 28467 3, кл. И 02 К 29/02 1979.
Фиг, г
1/ PZ R Эflфиг.
Фиг 8
