Изобретение относится к устройствам для объективного пространственного обмера фигуры человека (или других тел сложной формы). Необходимость в устройствах подобного типа существует, в частности при массовых антропометрических обследованиях. Разработка таких устройств является, кроме того, одной из задач, связанных с проблемой повышения уровня автоматизации при изготовлении одежды по индивидуальным заказам.
Известно устройство для обмера фигуры человека, содержащее вертикальные стойки и кольцевые направляющие с расположенными на них каретками, связанными с измерительной лентой.
Однако оно не обеспечивает автоматического обмера фигуры человека.
С целью автоматизации процесса обмера фигуры человека в предлагаемом устройстве на каретках установлены датчик углового отклонения измерительной ленты, приемный и подающий лентопротяжные механизмы, а кольцевые направляющие смонтированы с возможностью перемещения вдоль вертикальных стоек при помощи привода.
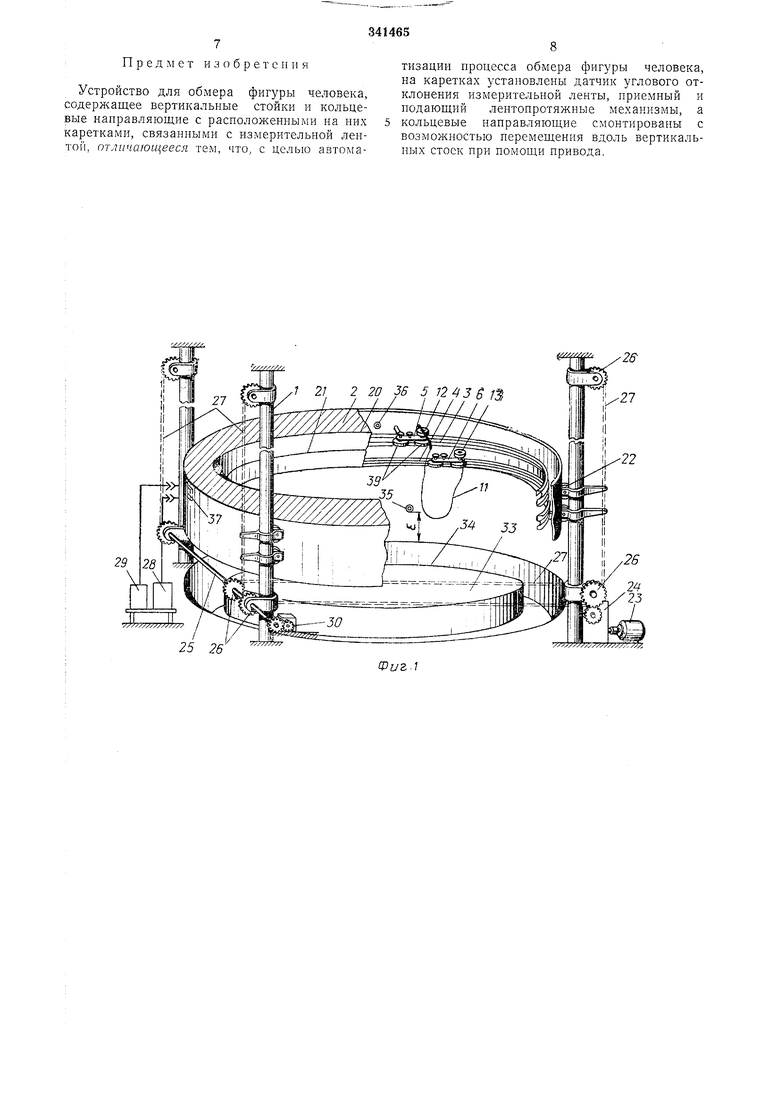
На фиг. 1 схематически изображено предлагаемое устройство обмера фигуры; на фиг. 2 - принцип действия устройства обмера фигуры; на фиг. 3 - действие устройства в начальной фазе процесса обмера; на
фиг. 4 - то же, в конечной фазе процесса обмера; на фиг. 5 - конструкция каретки.
Устройство состоит из направляющих стоек 1 вертикального перемещения, кольцевых направляющих 2 с расположенными в горизонтальных плоскостях колеями 3 и 4, самоходных кареток 5 и 6 с двигателями 7 и 8, кассетами 9 и 10 для намотки измерительной ленты 11, а также с приемным 12 и подающим
13 узлами лентопротяжного механизма, осуществляющими подмотку измерительной ленты. Каретка 5 содержит, кроме того, электрический датчик углового отклонения (ориентации) измерительной ленты, состоящий из качающегося язычка 14 (см. фиг. 5), соединенного механической передачей с преобразователем 15 изменений угла поворота вала в изменения частоты электрического колебания. На направляющей 2 закреплены кольцевые
щины 16 и 17 питания электродвигателей кареток. С щинами соприкасаются скользящие контакты 18, установленные на каретках. Колея 3 направляющей 2 является одновре.менно кольцевой сигнальной шиной, с которой соедииен емкостной связью выход преобразователя 15 с помощью обкладки 19, находящейся на каретке 5. На направляющей 2 расположен также защитный экран 20, на внутренней поверхности которого имеется узкая кольцерительиая лента. Круговая направляющая снабжена катками 22 вертикального неремещения. Для вертикального перемещения кольцевой нанравляющей служат двигатель 23 с редуктором 24, передаточный вал 25 и цепные передачи со звездочками 26 и цепями 27. Кроме того, имеется электронное устройство частотной демодуляции 28 выходного сигнала преобразователя 15, а также устройство синхр|онизадии 29 вертикального перемещения и датчик 30 местоположения направляющей 2 по вертикали.
.Устройство работает следующим образом.
;На фиг. 2 показано сечение 31 обмеряемой фигуры горизонтальной плоскостью, проходящей через круговую (с центром в точке О и радиусом R) траекторию 32 движения кассет 9 ;и 10. Кассеты движутся совместно по часовой стрелке. В плоскости сечения 31 объект измерения охвачен витком измерительной ленты 11, намотанной с одного конца на кассету 9 и с другого конца - на кассету 10. Под воздействием фрикционных муфт подмотки (на фиг. 2 не показан) поддерживается некоторое натяжение измерительной ленты на отрезке ее между кассетами. При движении кассеты 9 по траектории 32 сматывается с кассеты лента 11, навивающаяся на поверхность обмеряемого объекта в плоскости траектории 32. Одновременно при движении кассетш 10 идет процесс сгуштывания нити с поверхности объекта. Так, если кассеты находятся соответственно в точках Л и В, то наматывание нити на поверхность объекта идет со стороны Е охватывающего объект витка, а сматывание - со стороны F витка. Для иллюстрации на фиг. 2 показана также конфигурация витка измерительной ленты в тот момент, когда кассеты 9 Е 10 расположатся в процессе перемещения соответственно в точках С и D. Следует заметить, что устройство подмотки, связанное с кассетой 10, выполняет стандартные функции приемного узла известных лентопротяжных механизмов, в то же время устройство перемотки и подмотки, связанное с кассетой 9, вынолняет стандартные функции подающего узла лентопротяжного механизма.
По мере того, как кассеты обращаются по круговой направляющей, плоскость траектории 32 перемещается по вертикали {например, снизу вверх). Таким образом, кассеты описывают в пространстве винтовую линию с радиусом R и с некоторым шагом по вертикали е (см. фиг. }). Соответственно перемещается по вертикали плоскость расположения витка измерительной нити, охватывающего объект. В любой момент времени положение кассеты 9 в пространстве определяется том. каков угол (см. фиг. 2). (/( ,01... li...) между осью начала отсчета ОХ и радиусом-вектором кассеты 9, начало которого закреплено в центре О круговой траектории, а конец находится в точке расположения этой кассеты (угол Д, как и все другие углы.
оудем отсчитывать в направлепин часовой стрелки). Целочисленный коэффициент «k указывает количество полных витков винтовой линии, описанных к данному моменту
кассетой, считая от момента начала обмера, когда плоскость круговой нанравляющей находилась на уровне пола. Обмер объекта осуществляется тем, что в процессе движения кассеты 9 непрерывно измеряется угловое
отклонение pi (фиг. 2) сматываемой с этой кассеты нити от направления радиуса-вектора ОА кассеты 9. На выходе устройства регистрируется функция р(А), заключающая в себе описание формы фигуры.
Зная функцию pi (Л), можно с помощью простых вычислений построить прямоугольную проекцию фигуры на любую, как угодно ориентированную плоскость, проходящую через вертикальную ось.
Устройство действует следующим образом. На круговую площадку 33 (за чертой которой расположены стойки вертикального перемещения) приблизительно в ее центре (точной постановки в центр не требуется) помещается в прямой свободной стойке человек (клиент), фигура которого является объектом обмера. По границе площадки имеется кольцевая выемка 34, где в начальный момент времени утоплена кольцевая направляющая
2, при этом верхняя поверхность экрана 20 находится иа уровне пола. Этим обеспечивается свободный и безопасный доступ на площадку. При нажатии оператором пусковой кнопки включается двигатель 23 вертикального перемещения направляющей 2, приводящий во вращение (с участием передаточного вала 25) звездочки 26 цепной передачи. Это вызывает подъем скреплеиной с цепями 27 круговой направляющей, при этом катки 22
движутся по стойкам 1. В этой начальпой фазе работы устройства каретки 5 и 6 неподвижны и паходятся в пепосредствепной близости друг от друга, а измерительная лента // с кассеты 9 подаю-щего узла лентонротяжного механизма непосредственно переходит на кассету W приемного узла (как показано схематически на фиг. 3, положение а). Когда направляющая 2 достигнет уровня над полом, она воздействует своим движением на контактный выключатель 35, включающий напряжение па шипы 16 питания каретки 5. В то время, как каретка 6 остается на месте, каретка 5 приходит )з движение по круговой колее 3. При этом измерительная лепта, сохраняя патяжение, сматывается с кассеты 9 (см. фиг. 3, позиция б, в, г. По заверпиении кареткой 5 одного оборота по колее 3 объект измерения оказывается охваченным на уровне е от пола витком измерительной ленты
(фиг. 3, позиция д. Завершая оборот, каретка 5 воздействует своим движением на контактный выключатель 36, включающий напряжение па шины, питающие двигатель 8 каретки 6. Дальнейшее движение по круговой 5 вместно, как это было описано выше, следуя в непосредственной близости друг от друга по параллельным колеям 3 и 4. Устройство синхронизации 29, контролируя с помош,ью (индуктивного) датчика 37 фактический5 период обращения кареток по круговой направляюш.ей и регулируя в соответствии с этим периодом скорость двигателя 23, обеспечивает постоянство шага е винтовой траектории движения кареток. По окончании про-ю цесса обмера сначала останавливается (например, путем подачи тормозящего напряжения на щины 16, питающие двигатель 7) каретка 5. Каретка 6 продолжает движение (см. фиг. 4, позиции а, б, в, совершая еще один15 дополнительный оборот, а затем также останавливается (фиг. 4, позиция г). При этом объект измереиия оказывается автоматически освобожденным от охватывающего витка измерительной ленты.20 Каретка 5 в состоянии покоя опирается на ролик 38, г ролики 39 прижимаются к колее 3 весом каретки, центр тяжести которой находится с противоположной по отношению к колее 3 стороны от опорного ролика 55. После25 разгона каретка опирается только на ролики 39, противодействующие центробежной силе (используется вариант монорельсовой схемы). Привод от двигателя 7 через фрикционный ролик 40 осуществляется на один из роликов30 39. На каретке установлен подающий узел лентопротяжного механизма с кассетой 9, этот узел может повторять по констрзкции подающие узлы известных лентопротяжных механизмов. В данном варианте применена35 фрикционная муфта 41, поддерживаюш,ая в сочетании с подпружиненным поводком 42 определенное натяжение измерительной ленты. На каретке установлен электрический датчик углового отклонения измерительной40 нити в горизонтальиой плоскости. Чувствительным элементом датчика является язычок 14, качающийся в горизонтальной плоскости вокруг оси, совпадающей по положению с выходной щелью 43, через которую измери-45 тельная нить выходит из узла подачи наружу. Ориентация язычка всегда соответствует, очевидно, ориентации измерительной ленты. Язычек 14 снабжен балансирующим противовесом 44, служащим для устранения вращаю-50 щего момента за счет центробежной силы и зубчатым ceKTOpOiM 45, с иомощью которого угол поворота язычка преобразуется в угол поворота входной оси 46 преобразователя 15 угла поворота в частоту э.лектрического ко-55 лебания. Преобразователь имеет одну нз стандартных конструкций (например, ось 46 поворачивает ротор миниатюриого конденсатора переменной емкости, включенного в колебательный контур полупроводникового генера-60 тора высокочастотного колебания). Питается преобразователь 15 от батарейки 47. Выходной сигнал преобразователя (представляю610 мгц) передается через емкость между закрепленной на каретке обкладкой 19 и сигнальной шиной 3 на вход частотного демодулятора 28. Конструкция каретки 6 аналогична описанной, исключается лишь датчик углового отклонения ленты. Взамен датчика углового отклонения на каретке 6 может быть установлен расходомер, показывающий длину поступившего на кассету за период каждого оборота по круговой направляющей отрезка измерительной ленты. Этим самым непосредственно измеряется обхват в плоскости соответствующего оборота, Для материала ленты должно быть выбрано легкое и мягкое волокно, обладающее высоким коэффициентом трения скольл ения по поверхости одежды и тела человека. Это позволяет обойтись весьма слабым натяжением ленты и исключает какие-либо неприятные осязательные ощущения в процессе обмера, В любой момент времени в процессе обмера объект измерения охвачен лишь одним витколт измерительной ленты, что не создает препятствий для сохранения естественной осанки, Скорость движения кареток, вес КОТОРЫХ невелик, может быть доведена до весьма знаЧ11тельной величины, что обеспечивает быстродействие всего устройства. Например, при движенни с линейной скоростью 15 м/сек и диаметре круговой наиравляюитей 1800 мм каретки будут совершать без малого три оборота в 1 сек, что сокращает продолжительность обмера до 10-20 сек. Все быстродвижущиеся детали устройства (каретки), скпьттые экраном 20, невидимы и недоступны для человека, фигура которого обмеряется. Это гарантирует физическую безопасность и исключается мелькание, вызывающее неприятные зрительные ощущения. Медленно движущаяся вдоль вертикальных стоек круговая направляющая, внутренний диаметр которой может быть выбран достаточно большим (например, 1500 M.I, с любой точки зрения не представляет опасности, В процессе обмера измерительная лента, сохраняя натяжение, естественным образом принимает (на том небольшом участке, где она находится в контакте с объектом измерения) верхнее платье к поверхности тела. Этим сохраняется точность обмера, на наличие легкого верхнего платья. Устройство выдает описание формы фигуры в ви1е, пригодном для непосредственной регистрацит аналоговыми (самописец) ттли цифровьпти (перфоратор) записывающими устройствами, запись затем тожет быть введена непосредственно в память вычислительной маитины. Датчнк 30 осуществляет синхронизацию вьтходного записываюитего устройства, на вход которого поступает сигнал, отображающий функцию.
7 Предмет изобретения
Устройство для обмера фигуры человека, содержащее вертикальные стойки и кольцевые направляющие с расположенными на них каретками, связанными с измерительной лентой, отличающееся тем, что, с целью автоматизации процесса обмера фигуры человека, на каретках установлены датчик углового отклонения измерительной ленты, приемный и нодающий лентопротяжные механизмы, а кольцевые направляющие смонтированы с возможностью перемещения вдоль вертикальных стоек при помощи привода.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обмера фигуры чело-века | 1974 |
|
SU508247A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Устройство для обмера фигуры человека | 1988 |
|
SU1570703A1 |
| Устройство для обмера фигурычЕлОВЕКА | 1978 |
|
SU812261A1 |
| Способ кассетной перезарядки измерительной ленты в антропометрическом тангенциально-ленточном механизме и устройство для его осуществления | 1989 |
|
SU1701253A1 |
| Устройство для обмера фигуры человека | 1979 |
|
SU784860A1 |
| Устройство для снятия портновской мерки | 1988 |
|
SU1607768A1 |
| Устройство для обмера объемных фигур | 1989 |
|
SU1621846A1 |
| Устройство для обмера фигуры человека | 1980 |
|
SU936874A1 |
| Устройство для определения аэрозольных примесей в воздухе | 1990 |
|
SU1805298A1 |


25 26 38 Vuz. 6.iT W,I7
