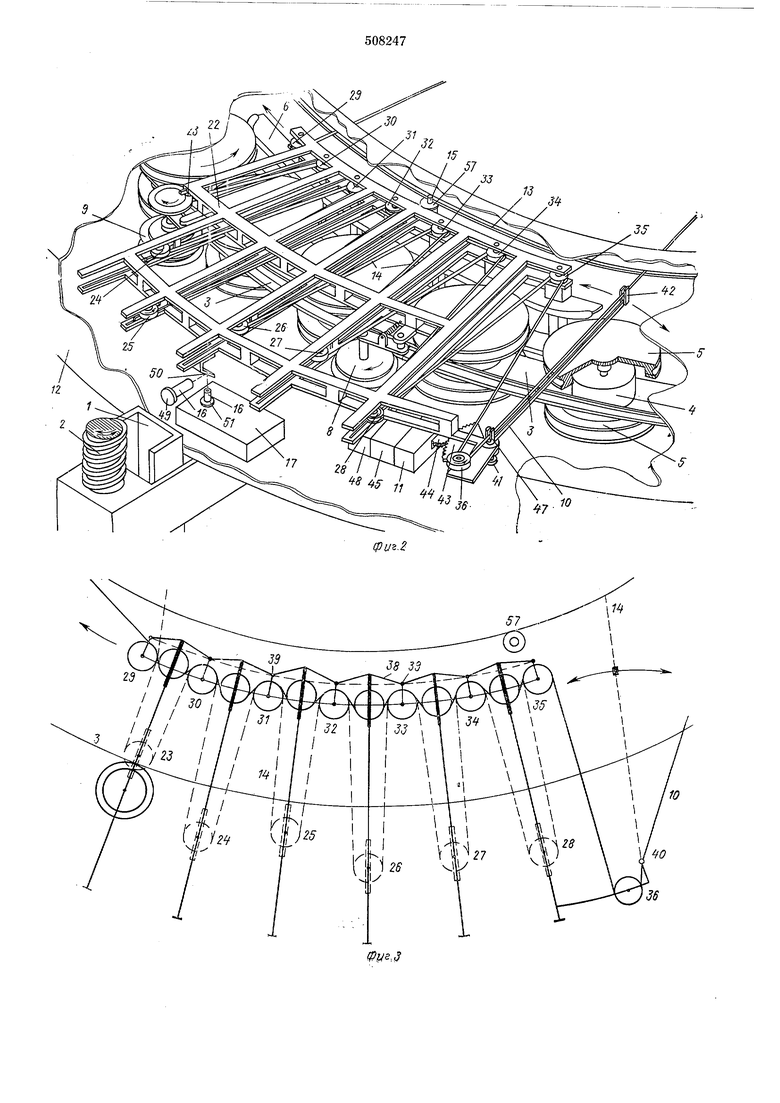
Расположенный на раме 22 каретки лентопротяжный механизм 7 имеет подвижные блоки 23, 24, 25, 26, 27 и 28 и неподвижные блоки 29, 30, 31, 32, 33, 34, 35 и 36. Измерительная лента 14 проходит по указанным блокам и в процессе качения по поверхности обмеряемой фигуры 37 поступает в лентопротяжный механизм (движущийся по часовой стрелке) со стороны блока 29 и выходит со стороны блока 36 и затем через качающийся поводок 10 (см фиг. 3, пунктирные линии лент 14 соответствуют рабочей стадии обмера, а сплошные линии - режиму холостого хода). При движении каретки подвижные блоки под действием центробежных сил стремятся занять вдоль радиальных направляющих наиболее удаленные от центра траектории каретки положения, что способствует поддержанию натяжения ленты на всех стадиях обмера.
В состоянии покоя и в режиме холостого хода, когда ограничители 15 ленты 14 выключены и обхватывающая наружные части петли лента имеет максимальную длину (см. фиг. 4, а), подвижные блоки удерживаются на ближайших позициях (см. фиг. 3, сплошные линии) . При этом натяжение ленты поддерживается эластичной питью 38, закрепленной на раме 22 в точках 39.
Качающийся в горизонтальной плоскости вокруг оси 40 поводок 10, через вилки 41 и 42 которого лента 14 выходит из лентопротяжного механизма 7, является чувствительным элементом датчика, измеряющим угловое отклонение измерительной ленты. Поводок снабжен зубчатым сектором 43, взаимодействующим с зубчатым колесом 44 преобразователя И угла поворота в частоту электрического колебания. Выходной сигнал преобразователя передается передатчиком 45 на неподвижный приемник 46, соединенный с регистрирующим прибором 47.
Питание расположенных на каретке электроустройств осуществляется от батареи 48.
В момент переключения лентопротяжным механизмом одного из ограничителей 15 световой луч осветителя 49 направляется установленным на раме рефлектором 50 на фотоприемник 51. Осветитель 49 и фотоприемник 51 образуют датчик 16 положения каретки, выходной импульс которого, отмечающий момент прохождения каретки мимо соответствующего ограничителя, поступает на вход переключающего устройства 17.
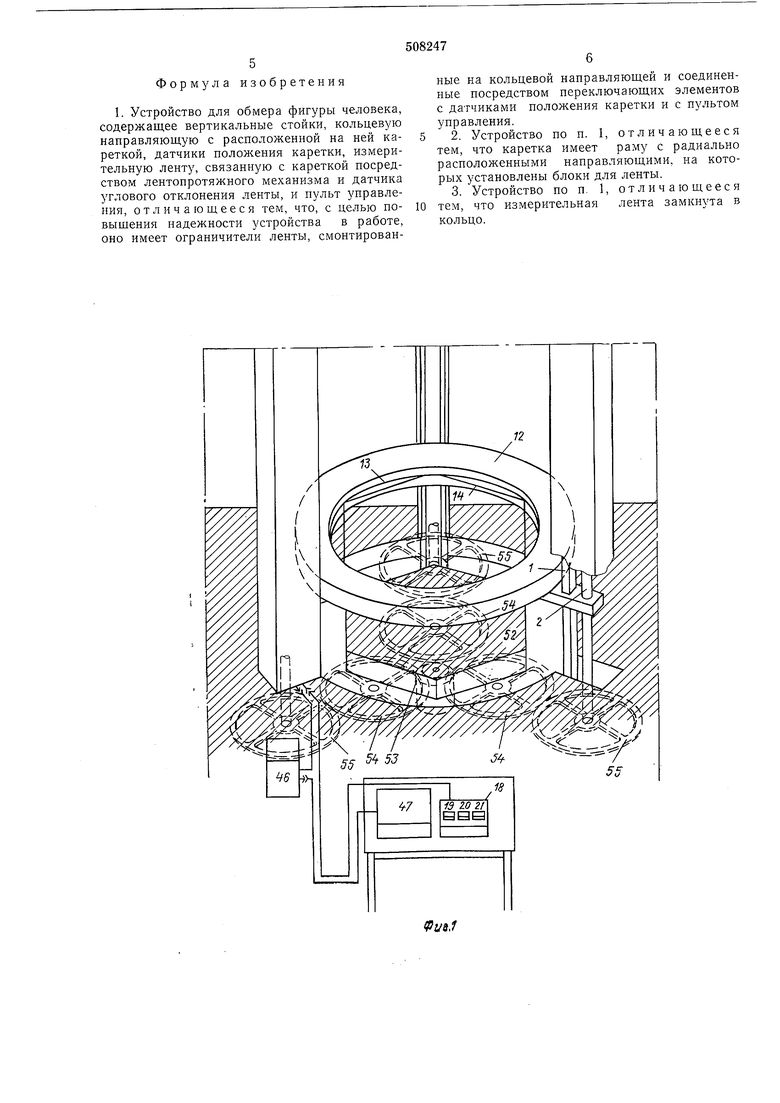
При обмере фигуры человек в прямом свободном положении перемещается на шестиугольной площадке 52 (приблизительно в ее центре), за чертой которой расположены стойки 1 и ходовые винты 2. Нажатием на пульт 18 клавишем 19 пуска включается двигатель 53, который через шестерни 54 и 55 приводит в движение ходовые винты, а также включает двигатель 4, приводящий в движение каретку 6.
В конечном итоге находящийся за пультом оператор управляет работой устройства, включая клавиш 21 обмера.
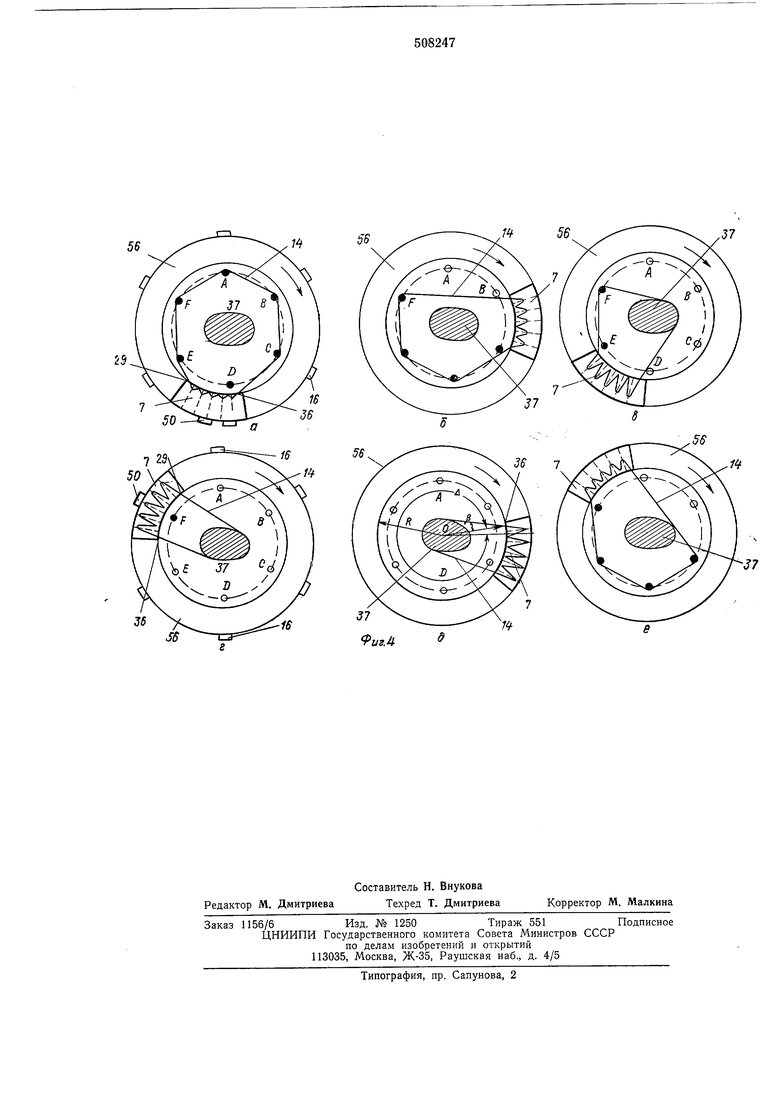
При обмере фигуры 37, например в сечении, проходящем через круговую направляющую 56 движения лентопротяжного механизма 7, установленные вдоль траектории ограничители 15 измерительной ленты 14 охватываются последпей.
Ограничители представляют собой вертикальные штифты, перемещаемые вдоль оси соленоидами 57 (см. фиг. 1). В нормальном (закрытом) положении штифты под действием пружины выдвинуты вверх и пересекают
горизонтальную плоскость расположения измерительной ленты 14, то есть плоскость движения лентопротяжного механизма 7. При подаче тока в соленоид 57 штифт выводится вниз и ограничитель 15 переключается в открытое положение (штифты ограничителей
15, обозначенные на фиг. 4 буквами А, В, С,
D, Е, F, находящиеся в закрытом положении,
показаны черным цветом).
В режиме холостого хода все ограничители находятся в закрытом положении (см. фиг. 4, а). Из,мерительная лента 14, имеющая форму замкнутой петли, проходит через лентопротяжный механизм и обхватывает штифты органичителей. Лентопротяжный механизм
постоянно поддерживает определенное натяжение петли лепты, заключенной между входным блоком 29 и выходным блоком 36. В это время измерительная лента в контакт с обмеряемой фигурой не входит.
Процесс обмера начинается при нажатии на пульте управления клавиши 21 обмера. При движении каретки происходит последовательное включение ограничителей, что обеспечивает плавный обхват объекта витком измерительной ленты (см. фиг. 4, 6, в, г, д}.
При отжатии клавиши 21 происходит постепенное выключение ограничителей и в конечной фазе - освобождение объекта от измерительной лепты и возвращение устройства в исходное положение (см. фиг. 4, е).
В процессе обмера, когда лентопротяжный механизм обращается по кольцевой направляющей 56, последняя перемещается снизу
вверх. Таким образом, механизм 7 описывает вокруг объекта винтовую линию.
Обмер объекта заключается в том, что в процессе движения лентопротяжного механизма 7 измеряется угловое отклонение выходящей из этого механизма измерительной ленты 14 от направления на центр «О. На выходном блоке 36 при помощи датчиков регистрируется функция |3(А) (см. фиг. 4, д), заключающая в себе описание формы обмеряемой фигуры.
Зная функцию Р(Д), с помощью простых вычислений строят набор прямоугольных проекций фигуры на произвольно смонтированные плоскости, проходящие через общую
вертикальную ось.
Формула изобретения
1. Устройство для обмера фигуры человека, содержащее вертикальные стойки, кольцевую направляющую с расположенной на ней кареткой, датчики положения каретки, измерительную ленту, связанную с кареткой посредством лентопротяжного механизма и датчика углового отклонения ленты, и пульт управления, отличающееся тем, что, с целью повышения надежности устройства в работе, оно имеет ограничители ленты, смонтированные на кольцевой направляющей и соединенные посредством переключающих элементов с датчиками положения каретки и с пультом управления.
2.Устройство по п. 1, отличающееся тем, что каретка имеет раму с радиально расположенными направляющими, на которых установлены блоки для ленты.
3.Устройство по п. 1, отличающееся тем, что измерительная лента замкнута в кольцо.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОБМЕРА ФИГУРЫ ЧЕЛОВЕКА | 1972 |
|
SU341465A1 |
| Устройство для обмера фигурычЕлОВЕКА | 1978 |
|
SU812261A1 |
| Устройство для обмера фигуры человека | 1988 |
|
SU1570703A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Способ кассетной перезарядки измерительной ленты в антропометрическом тангенциально-ленточном механизме и устройство для его осуществления | 1989 |
|
SU1701253A1 |
| Устройство для обмера объемных фигур | 1989 |
|
SU1621846A1 |
| Устройство для обмера фигуры человека | 1979 |
|
SU784860A1 |
| Устройство для обмера фигуры человека | 1980 |
|
SU936874A1 |
| Устройство для снятия портновской мерки | 1988 |
|
SU1607768A1 |
| ЛЕНТОЧНО-ОТРЕЗНОЙ СТАНОК___.4,J | 1971 |
|
SU308823A1 |
74
J5
1S
J7
