Изобретение относится к станкостроению и может быть использовано в устройствах для автоматического уравновешивания роторов.
Известны устройства для автоматического уравновешивания роторов в процессе их враш,ения, включающие блок управления, содержащий датчик неуравновешенности и усилитель, на вход которого включен датчик, и блок исправления неуравновещенности, содержащий исполнительный орган, например лазер. Однако сигнал, управляющий работой исполнительного органа, формируется от сигнала датчика неуравновешенности, что с уменьшением величины неуравновешенности приводит к неустойчивой работе устройства, ложным срабатываниям исполнительного органа и ограничивает точность уравновешивания.
Предлагаемое устройство отличается тем, что блок управления выполнен в виде схемы формирования синусоидального и косинусоидального опорных сигналов с использованием унравляемого фазовращателя, двух синхронных детекторов, на входы которых подключены выходы схемы формирования опорных сигналов и выход усилителя, формирователя импульсов, вход которого подключен к выходу схемы формирования опорных сигналов, и триггера, один из входов которого соединен с выходом формирователя импульсов, второй
вход соединен с выходом одного из синхронных детекторов, а выход - с блоком исправления неуравновешенности.
Это повышает точность уравновешивания. На чертеже изображена блок-схема описываемого устройства.
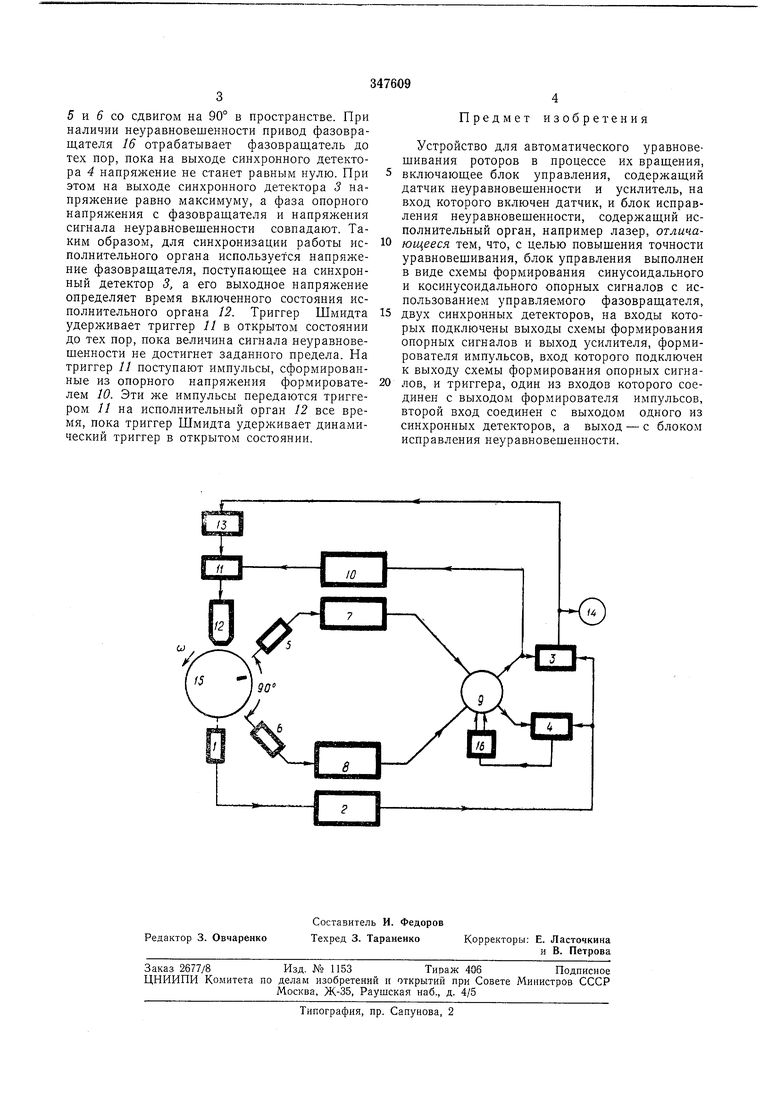
Устройство содерл ит датчик 1 неуравновещенности, включенный на вход усилителя 2,
синхронные детекторы 3 и 4, схему формирования синусоидального и косинусоидального опорных сигналов, включающую фотодиодные датчики 5 и 5 импульсных сигналов, формирователи 7 и S опорного синусоидального и косинусоидального сигналов соответственно и фазовращатель 9, формирователь 10 импульсов, триггер //, исполнительный орган 12, триггер 13 Шмидта и измеритель 14 величины неуравновешенности.
При вращении балансируемого ротора 15 напряжение с датчика неуравновешенности через усилитель 2 поступает на вход гармонических синхронных детекторов 3 и 4. На эти же детекторы поступают сигналы от фазовращателя 9, причем выходные сигналы фазовращателя сдвинуты по фазе на 90°. На в.ход фазовращателя 9 подаются два синусоидальных опорных напряжения от формирователя 7 и 8, сдвинутые по фазе на 90°. Такой сдвиг по фа5 и i5 со сдвигом на 90° в пространстве. При наличии неуравновешенности привод фазовращателя 16 отрабатывает фазовращатель до тех пор, пока на выходе синхронного детектора 4 напряжение не станет равным нулю. При этом на выходе синхронного детектора 3 напряжение равно максимуму, а фаза опорного напряжения с фазовращателя и напряжения сигнала неуравновешенности совпадают. Таким образом, для синхронизации работы исполнительного органа используется напряжение фазовращателя, поступающее на синхронный детектор 3, а его выходное напряжение определяет время включенного состояния исполнительного органа 12. Триггер Шмидта удерживает триггер 11 в открытом состоянии до тех пор, пока величина сигнала неуравновещенности не достигнет заданного предела. Па триггер 11 поступают импульсы, сформированные из опорного напряжения формирователем 10. Эти же импульсы передаются триггером 11 на исполнительный орган 12 все время, пока триггер Шмидта удерживает динамический триггер в открытом состоянии.
Предмет изобретения
Устройство для автоматического уравновещивания роторов в процессе их вращения, включающее блок управления, содержащий датчик неуравновешенности и усилитель, на вход которого включен датчик, и блок исправления неуравновешенности, содержащий исполнительный орган, например лазер, отличающееся тем, что, с целью повышения точности уравновешивания, блок управления выполнен в виде схемы формирования синусоидального и косинусоидального опорных сигналов с использованием управляемого фазовращателя,
двух синхронных детекторов, на входы которых подключены выходы схемы формирования опорных сигналов и выход усилителя, формирователя импульсов, вход которого подключен к выходу схемы формирования опорных сигналов, и триггера, один из входов которого соединен с выходом формирователя импульсов, второй вход соединен с выходом одного из синхронных детекторов, а выход - с блоком исправления неуравновешенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1983 |
|
SU1146803A1 |
| Устройство для автоматической балансировки роторов | 1979 |
|
SU864033A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942095A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУСТАНКУ | 1971 |
|
SU307293A1 |
| Преобразователь угол-фаза-код | 1980 |
|
SU858051A1 |
| Преобразователь угол-фаза-код | 1983 |
|
SU1153335A2 |
| Измерительное устройство к балансировочному станку | 1971 |
|
SU503155A1 |
| Измерительное устройство к балансировочному станку | 1975 |
|
SU567980A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1971 |
|
SU299756A1 |
| Преобразователь угол-фаза-код | 1985 |
|
SU1254582A1 |
