I
Изобретение огносигся к станкостроению и может быть использовано в устройствах аля автоматической балансировки роторе.
Известно устройство для автоматической балансировки ротфсе, содержащее последовательно соеонненные датчик рисба-5 ланса, блок определения параметров дисбаланса, блок управ;юния и испошительный орган, например лазер. Устройство предназначено для балансировки в процессе вращения ротора ЩО
Недостатком устройства является ограниченная точность балансировки, связанная с угловыми погрешностями коррекций дисбаланса, иэ-за различного запаздывания лазерных импульсов.5
Наиболее близким по технической суш нести к предлагаемому является устройств во для автоматической балансировки роторов в процессе их вращения, содержащее датчик дисбаланса и связанный с ним усилитель, послецсжательно соединенные датчик опорного сигнала, блок опредалания параметре дисбаланса, блок управ
ления и исполнительный орган, а также формирователь импуязсов, соединенный входом с выходом блока определения параметров дисбаланса, вгорой вход которого связан с выходом усилителя. Выход формирователя импульсов связан со вторым входом блока управления, а в качестве исполнительного органа применен лазер Ь
Недостатком данного устройства является то, что ошибка по фазе между действительным углом дисбаланса на роторе и местом воздействия исполнительного органа (лазера) ой1аруживается не сразу, а после коррекции некоторого количества материала. Это приводит к удалению с ротора лишнего материала, ухудшению поверхности ротора и снижению точности балансировки. ,
Ие/ь изобретения - пс ышение точности балансировки.
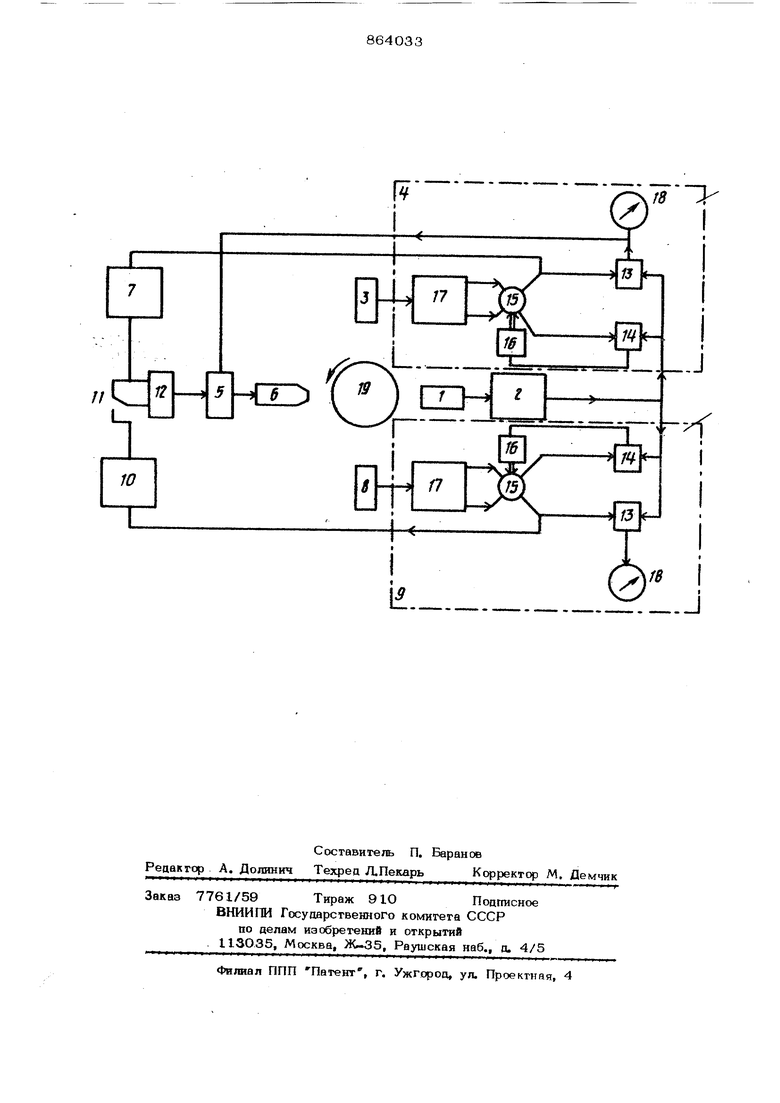
Поставленная цель достигается тем, что устройство снабжено последовательно . соединенными датчиком места воздействия исполштельного органа, вторым блоком опрепеления параметров писбаланса, вторым формирователем импульсов, переключателем и схемой логического умножения выхоа которой связан со вторым входом блока управления, второй вход второго блока определения параметров дисбаланса связан с выходом, усилите ля, а выход первого формирователя импульсов связан со вторыми входами схемы логического умножения и переключателя. Не чертеже приведена блок-схема устройства. Устройство для автоматической балан- сйрсжки роторсйз содержит датчик 1 дисба ланса и связанный с ним усилитель 2, по ледовательно соединенные датчик 3 опорного сигнала, блок 4 определения парамег ров оисбалонса, блок 5 управления и испо нительный орган 6, например лазер, а так же формирователь 7 импульсов, соединен ный входом с вьгходом блока 4 определения параметров дисбаланса, зторой вход которого связан с выходом усилителя 2, последовательно соединенные датчик 8 места воздействия исполнительного орган б, второй блок 9 определения параметров дисбаланса, второй формирователь 10 импульсов, переключатель 11 и схема 12 логического умножения, выход которой связан со вторым входом блока 5 управления, второй вход второго блока 9 определения параметре дисбаланса связан с вьссодом усилителя 2, а выход формирователя 7 импульсов связ11н со вторыми входами схемы 12 логического умножения и переключателя lit Блоки 4 и 9 определения параметре® дисбаланса вьтолнены идентичными и содержат каждый соединенные входами два синхронных детектора 13 и 14, фазовращатель 15 и механически связанный с ним привод 16, формирователь 17 ортогональных гармонических напряжений и измеритель 18, подключенный к выходу синхрснного детектора 13, выходы формирователя 17 ортогональных гармонических напряжений связаны с выходами фазовращателя 15, выходы после него - со вторыми входами синхронных деректоров 13 и 14, а выход синхронног детектс а 14 соединен с входом привода 16, а вход формирователя 17 фтогональ ных напряжений, первый и второй входы и выход синхрсжного детектора 13 образуют соответственно первый и второй входы, первый и второй выходы блоков 4 и 9 определения параметров дисбаланса. При работе устройства напряжение с датчика I дисбаланса через усилитель 2 поступает на входы синхршных детекторов 13 и 14 блоков 4 и 9 определения параметров дисбаланса. Сигнал, поступающий с выхода датчика 3 опорного сигнала, преобразуется формирователем 17 в два ортогональных гармонических напряжения, которьге питают фазоврашатель 15 блока 4 определения параметров дисбаланса. При наличии дисбаланса балансируемого ротора 19 привод 16 отрабатывает указанный фазовращатель 15 до тех пор, пока напряжение на выходе синхронного детектора не станет равным нулю. Напряжение на выходе синхронного детектора 13 равен максимальному и индицируется измерителем 18, а фаза опорного напряжения с фазовращателя 15 и напряжения сигнала дисбаланса совпадают . Таким образом, для синхронизации работы исполнительного органа 6 используется напряжение фазшращателя 15, блока 4 определения параметров дисбаланса, поступающее на синхронный датектор 13, а его выходное напряжение определяет время включения состояния исполнительного органа 6. Исполнительный орган 6, например лазер, удаляет с поверхности ротора материал, а место на которое воздействует исполнительный орган нагреваетcib Тепловое излучение воспринимает датчик 8 места воздействия исполнительного органа 6, чувствительный к инфракрасному излучению и формирует импульс, фаза которого по отноше1шю сигнала дисбаланса и опорного сигнала, определяется погрешностью работы исполнительного органа 6. Указанный имцульс подается на вход блока 9 определения параметров дисбаланса, где ИЗ-него формируется синусоидальный и косинусоидальный сигналы фо{ мирователем 17, С выхода фазовращателя 15 синусрицальные сигналы, сдвинутые по фазе на 90 , поступают на цва синхронных детектора 13 и 14. Привод 16 фазовращателя 15 отрабатьюает его до тех пор, пока на выходе синхронного детектора 14 напряжение не станет равным нулю. При этом на выходе синхронного детектора 13 напряжение равно максимуму. Сигнал с фазовращателя 15 поступает на второй формир(жагель импульсов, импульсы которого могут бьггь подключены ко входу схемы 12 логического умножения переключателем 11. Управл5пощиЙ сигнал на исполнительный орган 6 передается только в том случае, когда сигналы на входах схемы 58 12 логического умножения совпадают по фаэе. Совпадение фазы этих сигналов имеет место топько тогда, когда исполни тельный орган 6 удаляет материал без угловых погрешностей. Наличие ошибки приводит к сдвигу по фазе импульсов, пос тупающих на схему 12 логического умно жения, и исполнительный орган 8 прекращает работу. Введение в предлагаемое устройство последовательно соединенных датчика мес та воздействия испошитольного органа, второго блока определения параметров дисбаланса, второго формирователя импул СОВ, переключателя и схемы логического умножения позволят повысить точность балансировки за счет устранения уГловой погрешности, вызванной несовпадение момента генерации лазера с полсдкением тяжелого места ротора. В данном устройстве достижима угловая погрешность менее одного углового градуса, так как она определяется погрешностью регулиров ки датчика места обработки ротора и может быть уменьшена в прсадессе настройки устройства.. Формула изобретения Устройство для автоматической балансировки роторов в процессе их вращения 3 содержащее датчик дисбал&нса и связанный с 1ШМ усилитель, последовательно соединенные датчик опорногг сигнала, блок опрепеления параметре дисбаланса, блок управления и исполнительный орган, а также формирователь импульсов, соединенный входом с выходом блока определения параметров дисбаланса, второй вход которого связан с выходом усилителя, отличающееся тем, что, с це/ью повышения точности балансировки, оно снабжено последовательно соединенными датчиком места воздействия испотоитель ного органа, вторым блоком определения параметров дисбаланса, вторым формирователем импульсов, переключателем и схемой логического умножения, выход которой связан со вторым входом блока управления второй вход второго блока определения параметре дисбаланса связан с выходом усилителя, а выход первого формирователя импульсов связан со втсфыми входами схемы логического умножения и переключателя. Источники }шформации, принятые во внимание при экспертизе 1.Патент СССР N 424371, кл. q 01 М 1/38, 1971. 2.Авторское свидетельство СССР № 347609, кл. G О1 М 1/38, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1165905A1 |
| Устройство для балансировки | 1991 |
|
SU1793291A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |