Изобретение относится к устройствам для измерения углов наклона скважин.
Известны инклинометры, включающие кор пус, датчик азимута, выполненный в виде маятника и датчик угла отклонения от вертикали.
Предлагаемый инклинометр отличается от известных тем, что маятник датчика азимута снабжен постоянным магнитом и нодвешеи перпендикулярно оси инклинометра в емкости, над которой расположен феррозонд. Это повышает точность измерений инклинометра.
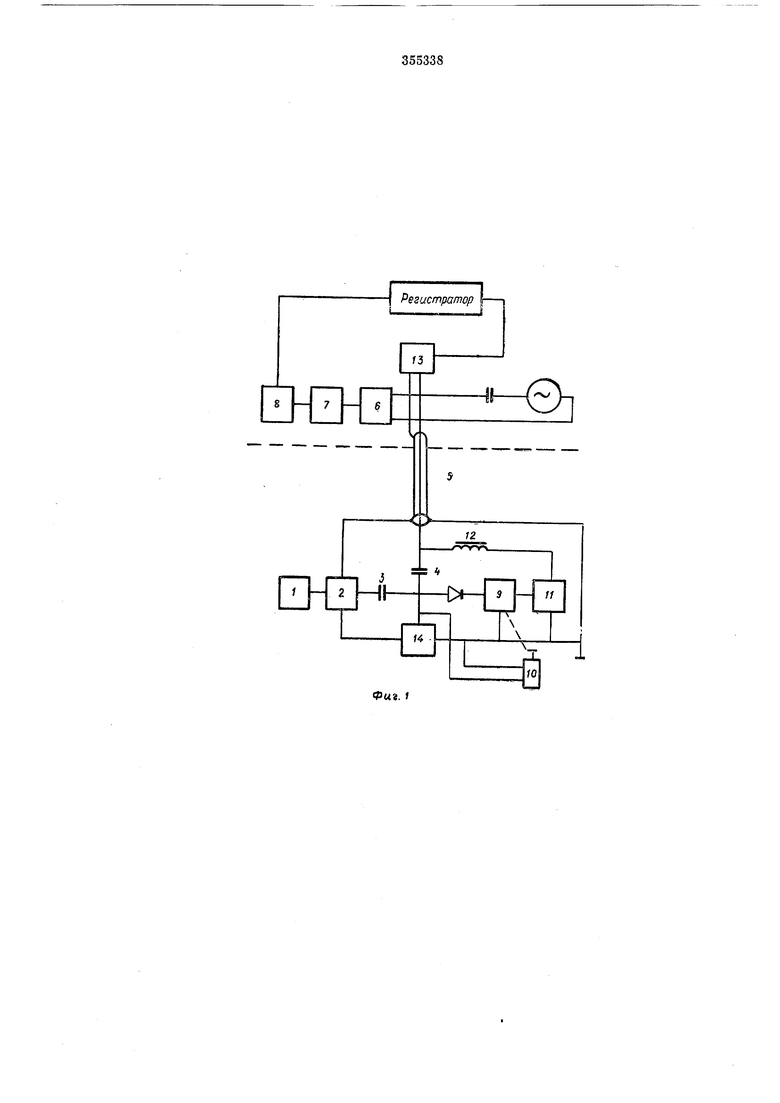
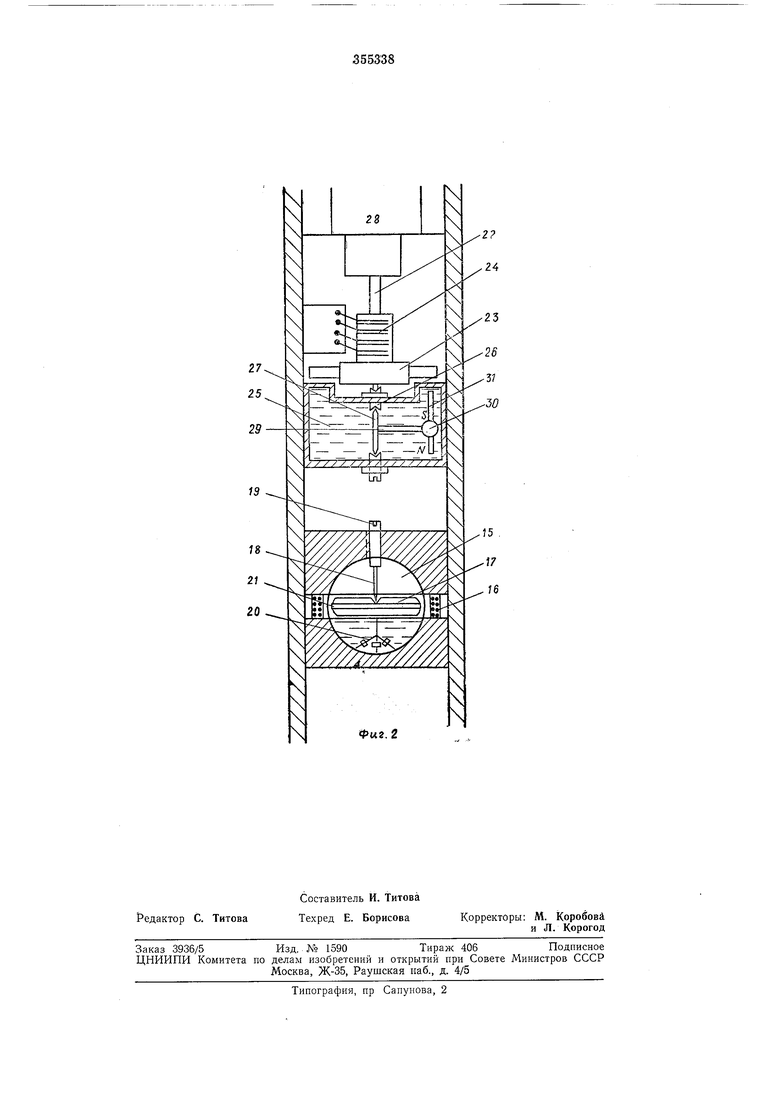
На фиг. 1 изображена электрическая схема лредлагаемого инклинометра; на фиг. 2 - инклинометр с датчиком угла отклонения и .датчиком азимута.
Датчик 1 угла отклонения от вертикали, через частотный преобразователь 2, конденсаторы 3 и 4, каротажный кабель 5, фильтр 6, усилитель 7 и частотный детектор 8 подключен к регистратору.
Датчик азимута 9, кинематически соединенный с электродвигателем JO, через выпрями тель //, дроссель J2, каротажный кабель 5, фильтр 13 соединен с другим входом регистратора. Силовой блок J4 обеспечивает питание частотного преобразователя.
установлена катушка 16 индуктивности. В полости емкости 15 помещен плоский поплавок 17, имеющий в центре одной стороны гнездо, в которое упирается центрирующая игла 18
с регулировочным винтом 19. С противоположной стороны закреплен отвес с балансирами 20. На поплавке установлено медное кольцо, образующее короткозамкнутый виток 21. Емкость 15 может иметь, например, шаровидную
форму, частично заполненную вязкой жидкостью.
Датчик азимута состоит из закрепленного на валу электропривода 22 феррозонда 23, соединенного с источником питания и с регистратором, например, через коллектор 24. Нод феррозондом установлен горизонтальный маятниковый механизм, помещенный в герметичную полую емкость 25, например, цилиндрической формы, заполненную вязкой жидкостью.
Маятниковый механизм состоит из установленной на подшипниках 26 вертикальной оси 27, соосной с валом электродвигателя 28, к которой жестко прикреплен рычаг 29, иесущий на свободном конце груз 30 с закрепленным на нем стержневым магнитом 31.
Датчик 1 угла отклонения от верт1икали с частотным преобразователем 2 и датчик азимута 9 с выпрямителем 11 и электродвигателем 10, а также силовой блок 14 питания размещены в корпусе инклинометра из антимагБИТНОГО материала.
Б рабочем положении феррозонд 23 с помощью электродвигателя 10 непрерывно медленно вращается, например, со скоростью 1-0-15 об,/мин, реагируя на магнитное поле земли и поле магнита, укрепленного на маятнике.
За счет однополярного питания феррозонда (через -диод) в момент совпадения продольной оси сердечника с направлением север-юг в выходной обмотке феррозонда в одном случае возбуждается максимальная э.д.с., а в другом случае, при повороте на 180° - минимальная э.д.с. Таким образом при вращении феррозонда регистрируется, синусоидальная кривая с максимумами, соответствующими, например, направлению на север и минимумами, соответствующими направлению на юг, или наоборот. Это зависит от полярности включения диода.
При отклонении оси инклинометра от вертикали возникает момент вращения, заставляющий рычаг 29 с грузом 30, а следовательно, и с магнитом 31, переместиться в сторону наклона. При прохождении одного полюса феррозонда 23 над магнитом 31 в выходной обмотке его возникает ириращение напряже-ния, а при прохождении другого полюса - уменьщение.
В целях демпфирования маятниковый механизм, следующий, за, направлением наклона инклинометра, помещен в емкость 25, заполненную вязкой жидкостью, например кремнийорганической жидкостью или трансформаторным масло.м. Вязкость жидкости обеспечивает стабильность состояния маятникового механизма при толчках и вибрациях и исключает инерционное раскачивание. Так как относительная длина плеча рычага 29 больщая, а трение в подпятниках незначительно, то маятниковый механизм имеет высокую чувствительность к отклонению инклинометра.
Выходные данные датчика угла отклонения от вертикали определяются взаимным расположением катущки 16 индуктивности и короткозамкнутого витка (или плоского сердечника), закрепленного на поплавке 17. Поплавок следит за положением зеркала жидкости, находящейся в емкости 15 и- является элементом, сохраняющим горизонтальность, а катущка 16 жестко соединена вместе с емкостью 15 с корпусом инклинометра.
Предмет изобретения
Инклинометр, .включающий корпус, датчик азимута, выполненный в виде маятника и датчик угла отклонения от вертикали, отличающийся тем, что, с целью повышения точности измерений, маятник датчика азимута снабжен постоянным магнитом и подвещен перпендикулярно оси инклинометра в емкости, над которой расположен феррозонд.
Регистратор
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| ПРЕОБРАЗОВАТЕЛЬ АЗИМУТА СКВАЖИННОГО ИНКЛИНОМЕТРА | 1991 |
|
RU2018647C1 |
| Инклинометр | 1975 |
|
SU620588A1 |
| Инклинометр | 1988 |
|
SU1569403A1 |
| Инклинометр | 1984 |
|
SU1194995A1 |
| Инклинометр | 1979 |
|
SU872738A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| ГИРОСКОПИЧЕСКАЯ ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ БУРЕНИЯ | 1997 |
|
RU2128821C1 |
QKi
-о//
„
itol
