Изобретение относится к горной промышленности, конкретно к устройствам, позволяющим определять значение азимутальных и зенитных углов в глубоких скважинах при наклонно-направленном бурении нефтяных, газовых, геологоразведочных скважинах, а также при аттестации имеющихся обсаженных скважин.
Известен гироскопический инклинометр (Салов Е.А., Кривоносов Р.И., Ильчанинов В.П. и др. авт. св. 1002551, кл. E 21 B 47/002, 1983, "Гироскопический инклинометр"), содержащий корпус, трехстепенный гироскоп, два датчика углов поворота, закрепленных на подвижной эксцентричной рамке, измерительный датчик угловой скорости, моментальный двигатель, преобразовательный блок и два цифровых фазометра, причем датчик угловой скорости установлен на наружной раме трехстепенного гироскопа так, что его ось чувствительности расположена перпендикулярно вектору момента трехстепенного гироскопа, его выход соединен с моментным двигателем, статор которого размещен на наружной рамке гироскопа, а ротор - на внутренней.
Недостатком данного инклинометра является большая сложность из-за необходимости применения двух прецизионных гироскопов - трехстепенного и двухстепенного.
Известен автономный гироскопический инклинометр (Фр., 254 1366, кл. E 21 B 42/022, 1985), содержащий закрепленные на корпус зонда трехкомпонентный акселерометр, двухкомпонентное лазерное гироскопическое устройство с ортогональными осями чувствительности, перпендикулярными оси скважин, преобразователь и компьютер, алгоритм функционирования которого включает фильтр Калмана. Компьютер определяет место положения и углы ориентации зонда.
Недостатками данного устройства являются высокая стоимость и низкая точность определения азимутального угла.
Также известен бескарданный инклинометр (Плотников П.К., Ледовской В.И., авт. св. 755999, кл. E 21 B 47/022, 1980).
Устройство содержит два соосно-последовательных установленных двухстепенных вибрационных гиротахометра, выходные оси которых параллельны оси корпуса, а оси собственных вращений ортогональны ей, имеются также глубиномер и вычислительное устройство.
Недостатком устройства является необходимость применения пары прецизионных вибрационных гиротахометров, которые промышленностью не освоены.
Известен инклинометр (Пономарев В.Н., Нехорошков В.Л. и Мухаметшин А.А., авт. св. 804822, кл. E 21 B 47/02, 1981), содержащий корпус, датчики магнитного поля, маятниковые кардановы подвесы и груз-эксцентрик, причем три ортогональных магнитометра установлены в наружной рамке с эксцентриком, обеспечивающим установку наружной рамки в апсидальной плоскости, а два других магнитометра установлены на двух маятниках, оси подвесов которых параллельны между собой и перпендикулярны плоскости эксцентрика, при этом ось чувствительности магнитометра, расположенного на первом маятнике, параллельна плечу маятника, а ось чувствительности магнитометра, закрепленного на втором маятнике, лежит в апсидальной плоскости и перпендикулярна плечу этого маятника.
Известен магнитометрический многоточечный инклинометр (ИММ) [4], который содержит корпус и чувствительный элемент, выполненный в виде магнитной поплавковой камеры, опоры подвеса которой расположены по продольной оси корпуса инклинометра и которая имеет маятниковость, плечо которой перпендикулярно оси подвеса поплавковой камеры, на этой камере с помощью опор подвеса установлены два немагнитных поплавка, оси подвесов которых перпендикулярны плоскости, включающей ось подвеса поплавковой камеры и плечо ее маятника, при этом поплавки имеют маятниковость, плечи которых перпендикулярны осям подвесов поплавков, зазоры между поплавками, поплавковой камерой и корпусом заполнены поддерживающей жидкостью, первый из поплавков содержит синусно-косинусный вращающийся трансформатор, обеспечивающий возможность преобразования угла поворота первого поплавка, называемого зенитным, в электрические сигналы, пропорциональные его синусу и косинусу, а на втором поплавке установлены два магнитометра, измерительная ось первого из них параллельна оси подвеса этого поплавка, а измерительная ось второго магнитометра перпендикулярна оси подвеса этого поплавка и плечу его маятниковости. С помощью этих магнитометров измеряются компоненты вектора напряженности магнитного поля Земли, а, следовательно, азимутный угол.
Данное устройство выбрано в качестве прототипа. Недостатком прототипа является то, что с его помощью нельзя производить измерения азимутального угла в обсаженных ферромагнитными трубами скважинах, а также нельзя производить измерения при работающем буре.
Данный недостаток может быть устранены путем введения в инклинометр гироскопического датчика угловой скорости (ДУС), а именно путем установки ДУСа с электрической пружиной на первом поплавке таким образом, что его измерительная ось параллельна оси подвеса поплавка, а ось собственного вращения ротора гироскопа перпендикулярна этой оси и плечу маятника поплавка. В этом случае в установившемся режиме ДУС будет измерять компоненту горизонтальной составляющей вектора угловой скорости вращения Земли, перпендикулярной апсидальной плоскости. Эта составляющая известна для исследуемой скважины с высокой точностью. Следовательно, с помощью вычислительного устройства можно определить азимут апсидальной плоскости по отношению к географическому Северу. Данное измерение может быть осуществлено в обсаженных ферромагнитными трубами скважинах и при работающем буре. В необсаженных ферромагнитными трубами скважинах информация с магнитометров является дублирующей и может быть использована для повышения надежности и точности определения угла курса в результате ее комплексной обработки с сигналом ДУСа. В обсаженных скважинах через определенное расстояние устанавливают легкосплавные беррилиевые трубы. На этих участках информация с магнитометров используется для определения угловой скорости дрейфа ДУСа, последующей ее компенсации и повышения таким образом точности определения угла курса по всей длине скважины.
Задачей изобретения является обеспечение процесса измерения инклинометром азимутального угла в обсаженных ферромагнитными трубами скважинах, а также при работающем буре.
Поставленная цель достигается тем, что в инклинометр, содержащий корпус, чувствительный элемент в виде немагнитной поплавковой камеры с опорами подвеса, ось которых параллельна оси корпуса, а поплавковая камера имеет маятниковость, причем плечо маятника перпендикулярно оси ее подвеса, а также два немагнитных поплавка, установленных в поплавковой камере с помощью опор подвеса, оси которых перпендикулярны плоскости, включающей ось подвеса поплавковой камеры и плечо ее маятника, поплавки имеют маятниковости, причем плечи маятников перпендикулярны осям подвеса поплавков, первый поплавок содержит синусно-косинусный вращающийся трансформатор, а во втором поплавке установлены два магнитометра, измерительная ось первого магнитометра параллельна оси подвеса второго поплавка, а измерительная ось второго магнитометра перпендикулярна оси подвеса второго поплавка и плечу его маятника, при этом зазоры между поплавками, поплавковой камерой и корпусом соединены и заполнены жидкостью введены гироскопический датчик угловой скорости и вычислительное устройство. Гироскопический датчик угловой скорости размещен в первом поплавке, при этом его измерительная ось параллельна оси первого поплавка, а ось собственного вращения ротора гироскопического датчика угловой скорости перпендикулярна оси подвеса первого поплавка и плечу его маятника. Выходы гироскопического датчика угловой скорости и магнитометров соединены с входом вычислительного устройства.
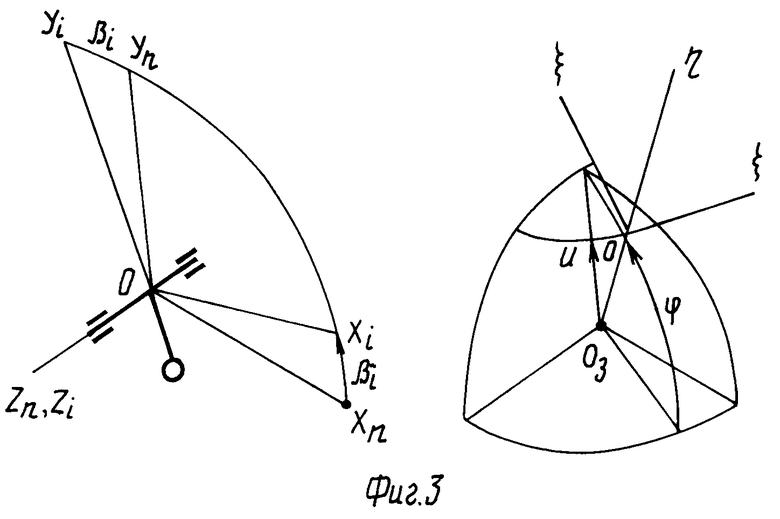
Конструкция инклинометра представлена на фиг.1,
где 1 - корпус инклинометра, 2 - поплавковая камера. Соединения и свободу вращения ее в корпусе вокруг оси OYn, параллельной оси скважины, обеспечивают опоры вращения 3 и 4, например шарикоподшипниковые. Маятниковость поплавковой камеры 2 обеспечивает конструкция поплавка, например, за счет утолщения стенки 5 поплавковой камеры по оси OXn, где система координат OXnYnZn связана с поплавковой камерой 2. Поплавок 6 является нижним ("вторым"), он соединен с поплавковой камерой 2 с помощью, например, шарикоподшипниковых опор 7 и 8, обеспечивающих свободу вращения поплавка вокруг оси, параллельной оси OZn.
В зазор 9 между вторым поплавком 6 и поплавковой камерой 3 поступает жидкость из зазора 10 между корпусом 1 и поплавковой камерой 2. В качестве жидкости может выступать веретенное масло. Поплавок 6 взвешен в жидкости, что уменьшает трение в опорах 7 и 8. Аналогично взвешена поплавковая камера 2. Поплавок 6 имеет маятниковость за счет, например, утолщения стенки 11, причем в исходном вертикальном положении оси OYn плечо маятника совпадает с этой осью. В поплавке 6 закреплены магнитометры 12 и 13, причем измерительная ось магнитометра 12 параллельна оси OZn, а измерительная ось магнитометра 13 перпендикулярна плечу маятника 11 и оси OXn.
Первый поплавок 14 является гироскопическим. Ось его вращения OYn параллельна оси вращения поплавка 6. Опоры 15 и 16 поплавка 14 выполнены аналогично опорам 7 и 8. Маятниковость поплавка 14 создается за счет, например, утолщения стенки 17. Зазор 18 между первым поплавком 14 и поплавковой камерой 2 выполнен аналогично зазору 9. На поплавке 14 закреплен ротор синусно-косинусного вращающегося трансформатора 19. В поплавке 14 размещен гироскопический датчик угловой скорости 20. На фиг. 1 изображен ДУС поплавкового типа с электрической пружиной, усилитель которой может быть размещен либо на поплавке 14, либо на корпусе 1 инклинометра (на фиг.1 не показано). Может быть применен ДУС на основе волоконно-оптического гироскопа или другого типа. Измерительная ось ДУСа параллельна оси подвеса OZn поплавкового гироузла (поплавка 14). В случае, когда ДУС классического типа, то ось собственного вращения направляется по оси OXn (H - кинетический момент гироскопа), а ось подвеса рамки ДУСа - по оси OYn.
На фиг.1 не показаны важные и нужные для работы гироскопического инклинометра токоподводы, сильфоны и др. элементы, но не существенные для понимания собственно изобретения. В частности, в состав устройства входит дополнительный соосный поплавковый камере 2 поплавок 21, имеющий маятниковость, плечо которой параллельно оси OXn, и предназначенный для предохранения скручивания гибких токопроводов между поплавковой камерой 2 и поплавком 21.
Работа устройства поясняется фиг.2 и фиг.3, на которых изображены 0ξηζ - географическая система координат, (ось 0ξ направлена на север, ось 0η - в зенит); OXnYnZn - система координат, связанная с поплавковой камерой 2, OXYZ - система координат, связанная с корпусом 1, ψ, θ, γ - углы курса (азимута), зенита и собственного поворота корпуса инклинометра, α - угол поворота поплавковой камеры 2 относительно корпуса 1. Плоскость является апсидальной. На фиг. 3 изображены повороты систем координат OXiYiZi (i=1,2), т.е. первого поплавка 14 (i= 1) относительно поплавковой камеры 2 на угол β1 и второго поплавка 6 (i=2) относительно поплавковой камеры 2; Tξ, Tη, Tζ - компоненты вектора напряженности магнитного поля Земли по осям географической системы координат; g - ускорение силы тяжести. Отметим, что в магнитогеографической системе координат имеем (ось 0ξм направлена по горизонтальной составляющей магнитной напряженности):
Tηм= Tη; Tξм= Tξ•cosλ-Tζ•sinλ; Tζм= 0, (1)
где λ - угол магнитного склонения.
При включении инклинометра и при введении его в скважину происходят следующие процессы. За счет наличия зенитного угла 8 маятниковость поплавковой камеры 2 обеспечит ее разворот вокруг оси OYn и установит ось OXn почти апсидальной плоскости. Плечи маятников поплавков 6 и 14 установятся почти вертикально. В результате ось собственного вращения ДУСа будет горизонтальной, и сигнал с ДУСа 20 будет пропорционален угловой скорости ωzп, , причем
ωzп= U•cosϕ•sinψ, (2)
где U - угловая скорость вращения Земли;
ϕ - широта места нахождения скважины.
Из формулы (2) имеем
sinψ = ωzп/U•cosϕ (3)
Угол поворота первого маятника β1= θ, , второго β2= -θ . По этой причине сигнал синусно-косинусного вращающегося трансформатора равны
где K2, K2 - коэффициенты передачи соответствующих выходов синусно-косинусного вращающегося трансформатора.
Сигналы магнитометров равны
Tzп= Tζм•sinψ; Tx2= Tζм•cosψ
В вычислительном устройстве оценки углов географического и магнитного курсов из следующих алгоритмов: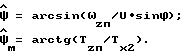 б
б
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ОТКЛОНЕНИЯ ЗАДАННОГО НАПРАВЛЕНИЯ ОТ ВЕРТИКАЛИ И ПОПЕРЕЧНЫХ УСКОРЕНИЙ ПОСРЕДСТВОМ ГИДРОДИНАМИЧЕСКИХ ГИРОСКОПОВ, СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА С АКСИАЛЬНЫМ СМЕЩЕНИЕМ ЦЕНТРА МАСС И СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ПЛАВУЧЕСТИ | 2004 |
|
RU2269097C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| Инклинометр | 1975 |
|
SU620588A1 |
| ГИРОСКОПИЧЕСКАЯ ИНКЛИНОМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ БУРЕНИЯ | 1997 |
|
RU2128821C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |

Изобретение предназначено для определения азимутальных и зенитных углов в глубоких скважинах. В корпусе размещен чувствительный элемент в виде немагнитной поплавковой камеры с опорами подвеса, ось которых параллельна оси корпуса. Поплавковая камера имеет маятниковость. В поплавковой камере с помощью опор подвеса установлены два немагнитных поплавка. Поплавки имеют маятниковости. Первый поплавок содержит синусно-косинусный вращающийся трансформатор, а во втором поплавке установлены два магнитометра, измерительная ось первого магнитометра параллельна оси подвеса второго поплавка, а измерительная ось второго магнитометра перпендикулярна оси подвеса второго поплавка и плечу его маятника. Зазоры между поплавками, поплавковой камерой и корпусом соединены и заполнены жидкостью. Гироскопический датчик угловой скорости размещен в первом поплавке, его измерительная ось параллельна оси первого поплавка, а ось вращения ротора перпендикулярна оси подвеса первого поплавка и плечу его маятника. Выходы гироскопического датчика и магнитометров соединены со входом вычислительного устройства, в котором определяется географический и магнитный углы курса инклинометра, а также его зенитный угол. Технический результат заключается в обеспечении процесса измерения инклинометром азимутального угла в обсаженных ферромагнитными трубами скважинах, а также при работающем буре. 3 ил.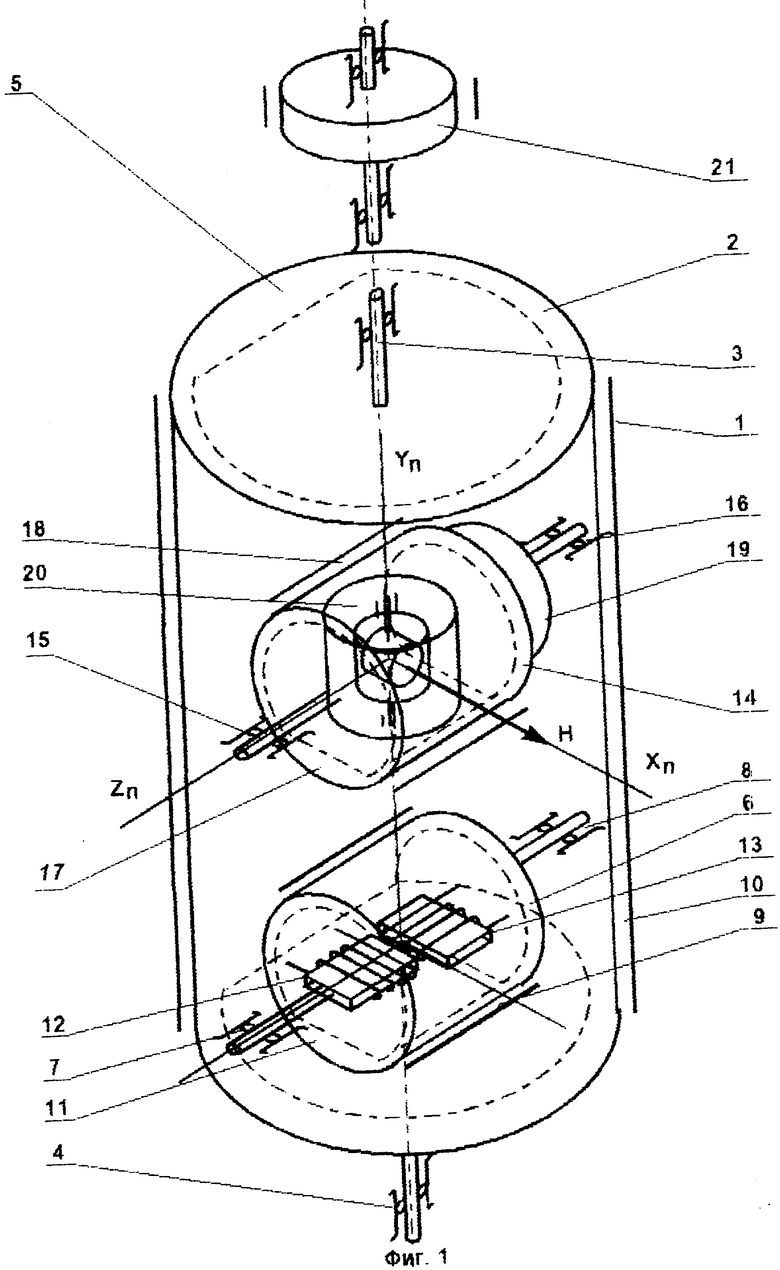
Инклинометр, содержащий корпус, в котором размещен чувствительный элемент в виде немагнитной поплавковой камеры с опорами подвеса, ось которых параллельна оси корпуса, поплавковая камера имеет маятниковость, причем плечо маятника перпендикулярно оси ее подвеса, два немагнитных поплавка, установленных в поплавковой камере с помощью опор подвеса, оси которых перпендикулярны плоскости, включающей ось подвеса поплавковой камеры и плечо ее маятника, поплавки имеют маятниковости, причем плечи маятников перпендикулярны осям подвеса поплавков, первый поплавок содержит синусно-косинусный вращающийся трансформатор, а во втором поплавке установлены два магнитометра, измерительная ось первого магнитометра параллельна оси подвеса второго поплавка, а измерительная ось второго магнитометра перпендикулярна оси подвеса второго поплавка и плечу его маятника, при этом зазоры между поплавками, поплавковой камерой и корпусом соединены и заполнены жидкостью, отличающийся тем, что введены гироскопический датчик угловой скорости и вычислительное устройство, гироскопический датчик угловой скорости размещен в первом поплавке, при этом его измерительная ось параллельна оси первого поплавка, а ось собственного вращения ротора гироскопического датчика угловой скорости перпендикулярна оси подвеса первого поплавка и плечу его маятника, выход гироскопического датчика угловой скорости и магнитометров соединены с входом вычислительного устройства.
