1
Известны системы контроля прямолинейности угольного забоя, содержащие комплект телеизмерения, комплекты логических схем управления домкратами крепи лавы и линию связи.
Предлагаемая система отличается от известных тем, что выход устройства телеизмерения подсоединен через ключ коммутации соседней секции креии к управляемому ключу схемы измерения выдвижки домкрата и с помощью диода - к вентилю, потенциальный вход которого связан с нулевым выходом триггера, а выход - с элементом задержки, включенным на единичный вход триггера и кипп-реле; потенциальный выход кипп-реле подключен на управляемый вход ключа схемы измерения и вход инвертора, выход инвертора и единичный выход триггера подключены к схеме совпадения, выход которой подан на управляющий вход ключа коммутации данной секции крепи.
Это позволяет уменьшить число проводов в линии связи.
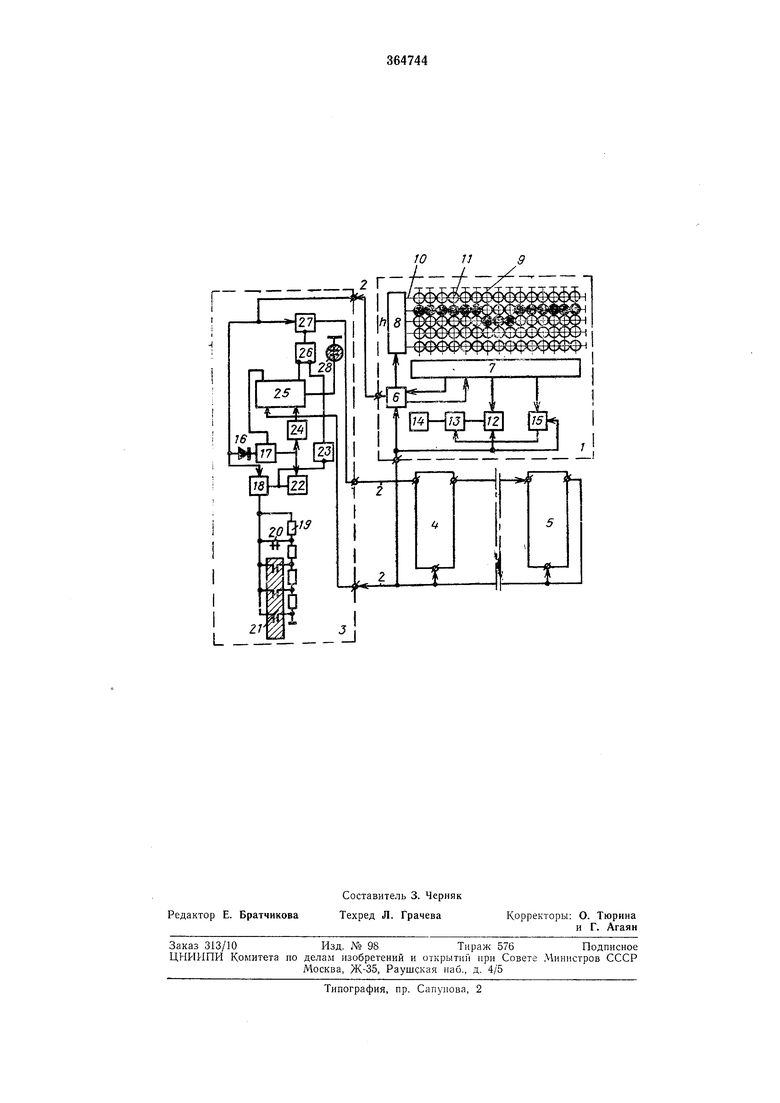
На чертеже приведена блок-схема описываемой системы контроля.
Комплект телеизмерения } установлен на пульте оператора струговой установки и связан двухпроводной линией связи 2 с комплектами логических схем управления домкратами 3, 4, 5. При этом устройство телеизмерения 6 связано как с распределителем 7 номеров домкратов, так и преобразователем 8 непрерывной величины в дискретную. Распределитель 7 и преобразователь 8 соединены
соответственно с координатными шинами 9 и 10, к которым подключены тиратронные схемы совпадения П, собранные в индикаторную матрицу, воспроизводящую в относительном масштабе кривизну забоя. Распределитель 7 подключен также к схемам совпадения «И 12, «ИЛР 13, индикации неисправностей 14, запрета /5.
Устройство телеизмерения 6 соединено линией связи 2 через диод 16 с вентилем 17 и
управляемым ключом измерения 18, подключенным, в свою очередь, к схеме измерения степени выдвнл ки домкратов, собранной из резисторов 19, магнитоуправляемых контактов 20 и установленного на подвил ной части
домкрата передвижки постоянного магнита 21.
Ключ измерения 18 соединен с кипп-реле 22, имеющим потенциальный вход, и инвертором 23, вентиль 17 включен на вход киппреле 22 и элемента задержки 24, выход которого - на единичный вход триггера 25.
Нулевой выход триггера 25 подключен к вентилю 17, а единичный выход - на первый вход схемы совпадения 26. Второй вход схемы совпадения соединен с инвертором 33. Выход схемы совпадения 26 подан на управляющий вход ключа 27, выход которого нодключен к следующему комплекту стоек домкратов 3, 4 и т. л. Система контроля прямолинейности забоя работает следующим образом. Устройство телеизмерения 6 получает импульс от распределителя 7 номеров домкратов и выдает напряжение на комплект домкрата 5. Положительный импульс этого напряжения через диод 16 нроходит на вход вентиля 17, открытого нулевым сигналом триггера 25. С выхода вентиля 17 сигнал подается на кипн-реле 22 и элемент задержки 24. С выхода элемента задержки 24 импульс поступает на единичный вход триггера 25 и ставит его в положение «I. К этому моменту происходит срабатывание кипп-реле 22, открывается управляемый ключ 18, подключающий цепи измерительных сопротивлений, а устройство телеизмерения нульта онератора выдает отрицательное напряжение для замера сопротивления делителя напряжения, величина которого обратно пропорциональна стенени выдвижения домкрата. Чем больще выдвинут домкрат, тем меньще магнитоуправляемых контактов 20 находится в разомкнутом сострянии. Устройство 6 образует на выходе напряжение, величина которого пропорциональна степени выдвижения домкрата и выдается это напряжение на преобразователь 8 непрерывной величины в дискретную, выходные координатные шины которого образуют матрицу с выдодными щинами 9 распределителя 7 стоек. В месте пересечения вертикальной и горизонтальной щин, находящихся под напряжением, происходит «зажигание тиратронной ячейки совпадения «И 11. Номер «зажегщейся ячейки (если считать снизу в столбце матрицы) пропорционален степени выдвижения домкрата и передвижки конвейера. После замера на одном из домкратов распределитель 7 производит переключение устройства 6 на замер состояния следующего домкрата. Индикация его производится аналогично первому. Схема совпадения 26, на один из входов которой подан разрешающий нотенциал с единичного выхода триггера 25 и запирающий потенциал с выхода инвертора 23, выдает напряжение, удерживающее управляемый ключ 27 в закрытом состоянии на время замера, так что напряжение замера не проходит на схему следующего домкрата. После окончания процесса измерения на нервом домкрате кипп-реле 22 прекращает подачу потенциала, открываюпхего управляемый ключ 18, и выдает разрегпающий потенциал на схему совпадения 26. Схема совпадения 26 после этого открывает управляемый ключ 27. Триггер 25 остается в единичном состоянии, и горит сигнальная лампочка 28. Раснределитель 7 нбмеров домкратов переводит устройство 6 в состояние, соответствующее телеизмерению следующего домкрата, после чего устройство 6 вырабатывает импульс положительной полярности, который проходит через ключ 27 схемы нервого домкрата (вентиль 17 закрыт потенциалом с нулевого выхода триггера 25) и попадает на схему измерения следующего домкрата. «Зажженная строка тиратронов будет сохранять свое состояние до конца цикла замера положения всех домкратов и на мнемосхеме пульта онератора будет изображена конфигурация линии забоя, определенная по степени передвижки кот1вейера лавы домкратами гидрокрени. После измерения в схеме последнего домкрата устройство 6 вырабатывает импульс положительной полярности, который проходит через ключ схемы последнего домкрата, поступает на нулевые входы триггера 25 схем всех домкратов и ставит эти триггеры в нулевое состояние, а также поступает на устройство 6 и приводит его в исходное состояние. П зедмет изобретения Систе.ма контроля прямалннейности угольного забоя, содержащая комплект телеизмерения, комнлекты логических схем управления домкратами крепи лавы и линию связи, отличающаяся тем, что, с целью уменьшения числа проводо.в в линии связи, выход устройства телеизмерения подсоединен через ключ коммутации соседней секции крени к управляемому ключу схемы измерения выдвижки домкрата и с помощью диода - к вентилю, потенциальный вход которого связан с нулевым выходом триггера, а выход - с элементом задержки, включенным на единичный вход триггера и кипп-реле; потенциальный выход кипп-реле подключен на унравляемый вход ключа схемы измерения и вход инвертора; выход инвертора и единичный выход триггера подключены к схеме совпадения, выход которой подан на управляющий вход ключа коммутации данной секции крепи.
L :Ж
W и9

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫРАВНИВАНИЯ ИСКРИВЛЕННОЙ ЛИНИИ ЗАБОЯ СТРУГОВОЙ ЛАВЫ | 1972 |
|
SU350948A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В КОД | 1970 |
|
SU271917A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТЕЙ БУМАГОДЕЛАТЕЛЬНЫХ МАШИН | 1972 |
|
SU330474A1 |
| ИЗМЕРИТЕЛЬНЫЙ КОММУТАТОР СЕТОЧНОЙ ЭЛЕКТРОМОДЕЛИ | 1967 |
|
SU222757A1 |
| Реверсивный электропривод | 1972 |
|
SU610274A1 |
| СИСТЕМА ТЕЛЕИЗМЕРЕНИЯ ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ ШАХТНОГО ПРОВЕТРИВАНИЯ | 1969 |
|
SU253443A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Устройство для отмывки гидротипных матриц | 1969 |
|
SU376021A1 |
| Устройство автоматизированного контроля | 1987 |
|
SU1525680A2 |
| Резонансный уровнемер | 1981 |
|
SU974135A1 |