1
Известны способы одределения параметров схемы замещения асинхронной машины с немагнитным полым ротором по данным трех опытов.
Недостатком известных способов является необходимость точного измерения в третьем опыте помимо электрических величин скорости вращения ротора и поддержания определенной велич1ины этой скорости.
Кроме того, затруднителен контроль и поддержание кругового поля в воздушном зазоре во всех трех олытах, для машин, обладающих электрической и пространственной асимметрией обмоток статора.
Предложенный способ позволяет устранить указанные недостатки. Это достигается тем, что присоединяют к сети обмотку одной фазы и измеряют ее активную и реактивную составляющие полного сопротивления сначала прл неподвижном роторе, а затем делают два анало пичных замера при производных скоростях вращения.
Все олыты производятся при разомкнутых обмотках других фаз.
На основании полученных данных вычисляют искомые величины.
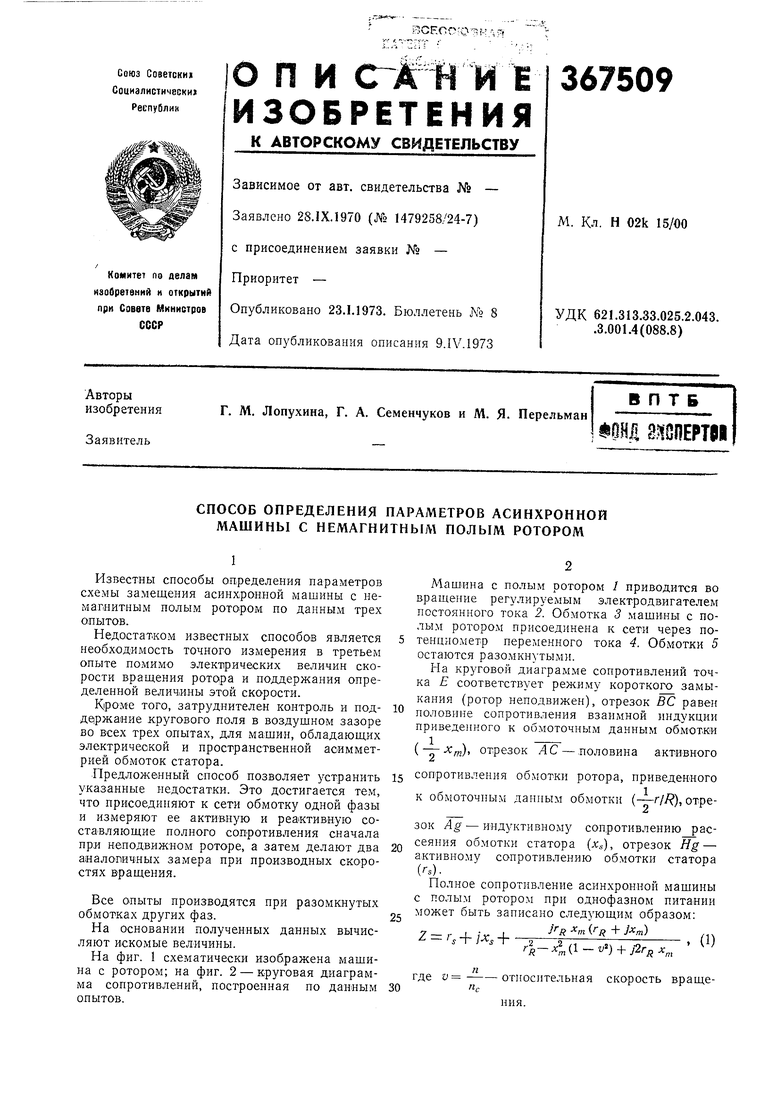
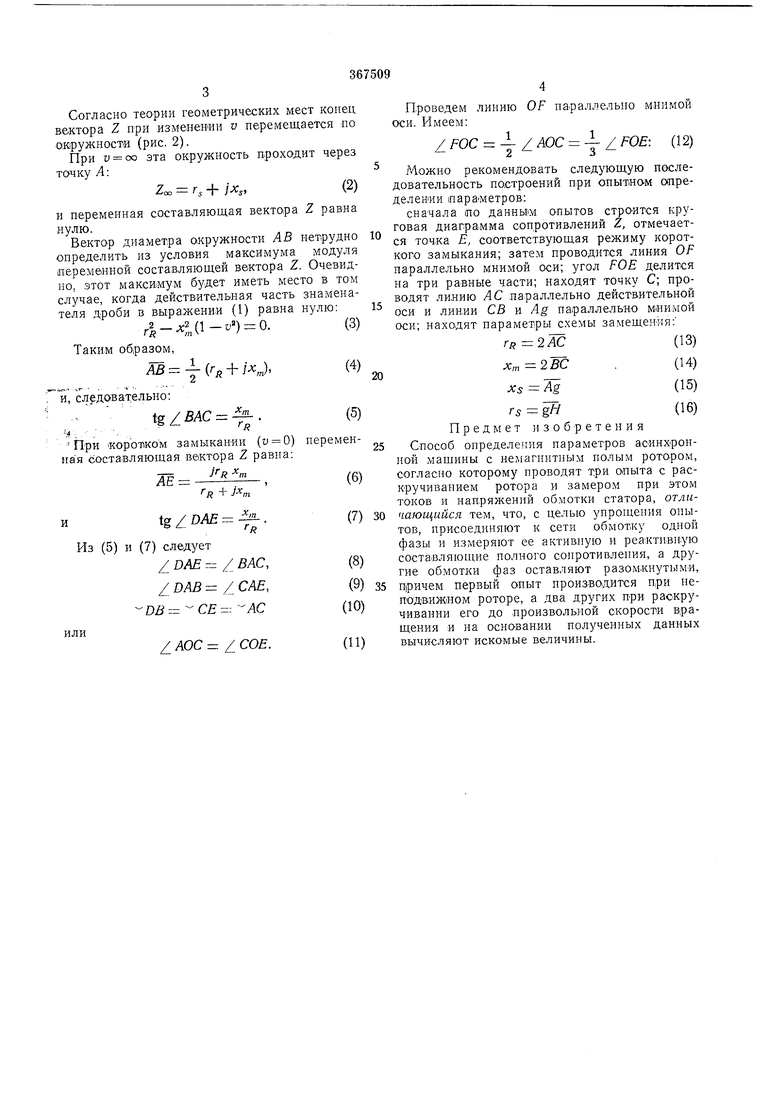
На фиг. 1 схематически изображена машина с ротором; на фиг. 2 - круговая диаграмма сопротивлений, построенная по данным опытов.
Машина с полым ротором / приводится во вращение регулируемым электродвигателем постоянного тока 2. Обмотка 3 машины с полы.м роторол присоединена к сети через потенпиометр nepejMeHHoro тока 4. Обмотки 5 остаются разомкнутыми.
На круговой диаграмме сопротивлений точка Е соответствует режиму короткого замыкания (ротор неподвижен), отрезок ВС равен половине сопротивления взаимной индукции приведенного к обмоточным данным обмотки
(--х,п), отрезок Л С - ,половина активного
Zi
сопротивления обмотки ротора, приведенного к обмоточным данным обмотки (-г//), отрезок Ag - индуктивному сопротивлению jacсеяния обмотки статора (-ts), отрезок tig - активному сопротивлению обмотки статора
(г.).
Полное сопротивление асинхронной машины
с полым ротором при однофазном питании
может быть записано следующим образом:
JfR Х,п (TO jXm)
. (1)
z /-, + /X +
() +
где у относительная скорость враще30
ния. Согласно теории геометрических мест конец вектора Z при изменении v перемещается по окружности (рис. 2). При и 00 эта окружность проходит через точку А: Zoo - S t и переменная составляющая вектора Z равна нулю. Вектор диаметра окружности АВ нетрудно определить из условия максимума модуля переменной составляющей вектора Z. Очевидно, этот максимум будет иметь место в том случае, когда действительная часть знаменателя дроби в выражении (1) равна нулю: ) о-(3) Таким образом. АВ(г + 1х, и, следовательно: - tgZBAC .(5) И :,. При коротком замыкании (и 0) переменная составляющая вектора Z равна: АЁ к + Иtg / DAE . Из (5) и (7) следует / DAG - / ВАС, / 1)Л5 - ./ САБ, СЕ АС / АОС / СОЕ. (9) (10) Проведем линию OF параллельно мнимой оси. Имеем: / FOC - - / АОС - Z. FOE: (12) Можно рекомендовать следующую последовательность построений при опытном определении еараМетров: сначала по данным опытов строится круговая диаграмма сопротивлений Z, отмечается точка Е, соответствующая режиму короткого замыкания; затем проводится линия OF параллельно мнимой оси; угол FOE делится на три равные части; находят точку С; проводят линию АС .параллельно действительной оси и линии СВ и Ag параллельно миимой оси; находят параметры схемы замещеш я; (13) л;т 25С.(14) xs Ag (16) Предмет изобретения Способ определения параметров асинхронной мащины с немагнитным полым ротором, согласно которому проводят три 01пыта с раскручиванием ротора и замером при этом токов и напряжений обмотки статора, отличающийся тем, что, с целью упрон1ения опытов, присоединяют к сети обмотку одной фазы и измеряют ее активную и реактивную состаВляющие полного сопротивления, а другие обмотки фаз оставляют разомкнутыми, причем первый опыт производится при неподвижном роторе, а два других при раскручивании его до произвольной скорости вращения и на основании полученных данных вычисляют искомые величины.