1
Изобретение относится к области мо1Н-тажньгх меха И1Эмов и, в частности, к устройствам для лодъема ев вертикальное положение монстр у кци и.
Известны устройства для подъема .в вертикальное положение длинномерщых конструкций, содержащие лодъемиый орган в виде движителя, за креп л веского на поднимаемой конструкции. Недостатком известных устройств является малая надежность их работы при (Подъеме.
Целью изобретеиия является повышение надежности Подъема конструкций.
Это достигается тем, что движ.итель закреплен на конструкции посредством щили1ндричеcwoTQ шарнира, установлениого под прямым углом |к ней, (И снабжен механизмом ориентации, вы1полне1Н ным в виде ирйвода, соеди ненпого посредством передачи с осью поворота движителя.
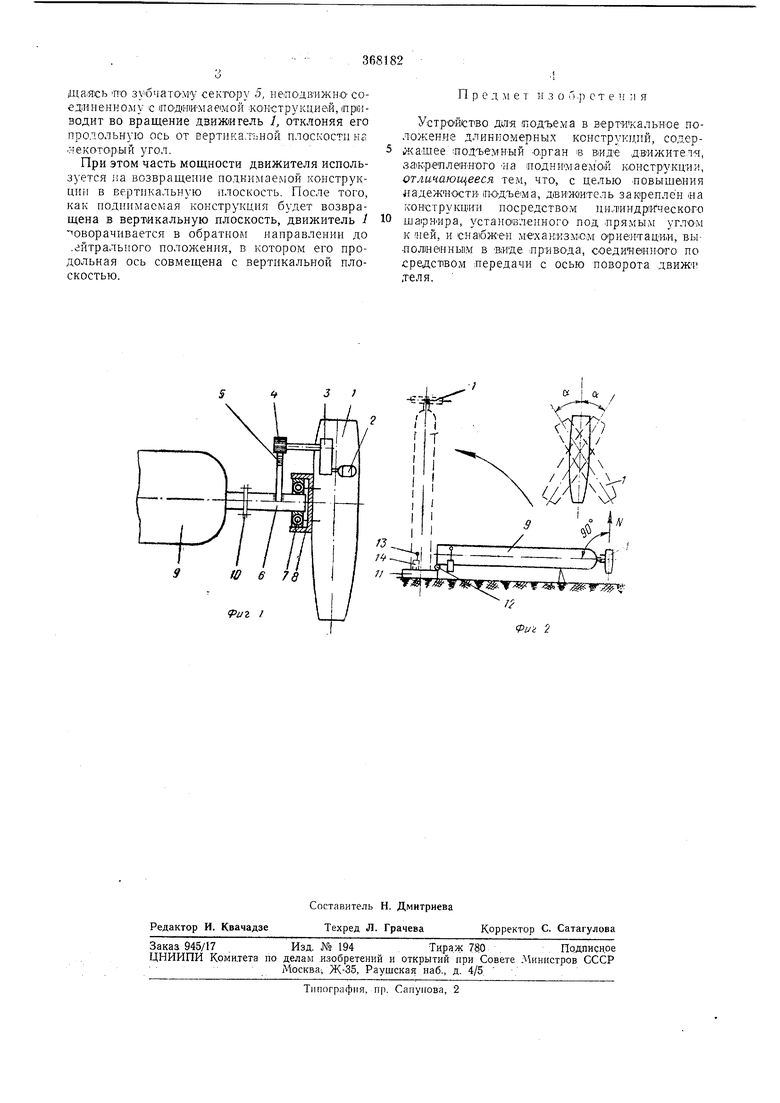
На фиг. 1 изображбно (предложенное устройство; на фиг. 2 - то же, в рабочем положении.
Устройство состоит «3 реа-ктивного или В1ИНтомоторного движителя 1 и механизма ориентации, включающего электродвигатель 2, редуктор 3, шестерню 4, зубчатый сектор 5, установленный неподвижно на оси 6, нодшин.н,ика 7 « втулки- 8, жестко соединенной с дв1ижителем 1.
Все устройство укрепляется в верхней части поднимаемой конструкции 9 фланцевым соединением 10.
Ооеди1Н1ени;е подъемного устройства с подоьимае.мой конструкцией осуществляется в горизонталъ-ном предмонтажном положении последнего. В этом положении конструкция соединена с фундаментом 11, на который она .должна -быть вертикально тстановлепа, опорным шарниром 12. На шарнирах 13 присоединяются два или более гидравлических аморти(Затора 14.
При включении движитель / развивает подъемное усилие N, направленное стабильно тангелциально по от1ношен1ию к траектории любой ТОЧ1КИ поднимаемой конструкций. Величина jV монотонно изменяется в процессе подъе.ма от максимального значения до нуля. В тот мо1мент, кюгда , Н1агрузка от веса поднимаемой конструкции начинает передаваться на тто-ки а(.мортизаторов 14, .которые снижают скорость опускания конструкции на анкерные болты фундамента //.
При случайном отклонении поднимаемой конструкции от вертикальной плоскости включается электродвигатель 2, который приводит 030 вращение шестерню 4. Последняя, перемеД1,аясь irro зубчатому сектору Л, иеподвижносоединенному с шодиимаевдой «о-кструкцией.ирв-ь водит во вращение движитель /, отклоняя его продольную ось от вертика.тьной плоскости нй Некоторый угол.
При этом часть мощности движителя используется jja возвращение поднимаемой конструкции в вертикальную плоскость. После того, как поднимаемая конструкция будет возвращена в верт1икальную плоскость, движитель 1 поворачивается в обратном направлении до .гйтралыюго положения, в котором его продольная ось совмещена с вертикальной плоскостью.
П р е д м е т и з о о ,р с т е и и я
Устройство дотя (подъема в в-ертикальное положение длинкомерных конструкций, содер1Н аШее подъемный орган в движителч, за Крепле1НИого На 1подни1маем0|й коиструкции, отличающееся тем, что, с целью .повышения надежностичподъема, движитель зак реилён «а 1 оиструкц1ии посредством цнл1индр Ического ша1рнира, установленного под .прямы.м углОМ к ней, и СнаюЖеН механизмом ориентац-ии, выло лиан ньп.м в Виде лривода, ооедниеиното но средством передачи с осью поворота движ1 .теля.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| АЭРОМОБИЛЬ | 2019 |
|
RU2715099C1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2604252C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛЫХ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1991 |
|
RU2023604C1 |
| Аэродинамическое судно | 2016 |
|
RU2611676C1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С ГИДРОВОЛНОВЫМ ДВИЖИТЕЛЕМ | 2014 |
|
RU2603812C2 |
| АЭРОМОБИЛЬ | 1999 |
|
RU2148004C1 |
| Аэромобиль | 2016 |
|
RU2617000C1 |
| СБОРОЧНО-СВАРОЧНЫЙ СТАН | 2007 |
|
RU2359799C2 |
/ Ри- 2 :
