1
Изобретение относится к аналоговой вычислительной технике, предназначено для воспроизведения момента сопротивления механизма и может быть использовано при электродинамическом моделировании электропривода.
Известны устройства для воспроизведения нагрузок на валу двигателя, содержащие генератор постоянного тока, работающий на активное сопротивление. Регулирование генератора осуществляется путем изменения тока возбуждения генератора в соответствии с разностью между сигналом, пропорциональным требуемому значению момента, и сигналом обратной связи, пропорциональным фактическому моменту генератора. Однако быстродействие воспроизведения нагрузочных моментов в этих устройствах ограничено электромагнитной постоянной времени обмотки возбуждения.
Кроме того, известная динамическая модель нагрузки типа испытуемый двигатель-генератор постоянного тока обладает в зависимости от конкретной Схемы устройства либо недостаточным быстродействием, либо недостаточной точностью, либо недостаточными возможностями по мощности или скорости (ограничение, связанное с наличием щеточно-коллекторного узла).
Цель изобретения - повышение быстродействия и точности устройства.
Для этого предлагаемое устройство содержит генератор переменного тока, механически связанный с валом двигателя, выпрямитель, соединенный с выходом генератора переменного тока, и блок управления, выход которого подключен к выпрямителю, а входы соединены с моделью приводного механизма и измерительным преобразователем мощности.
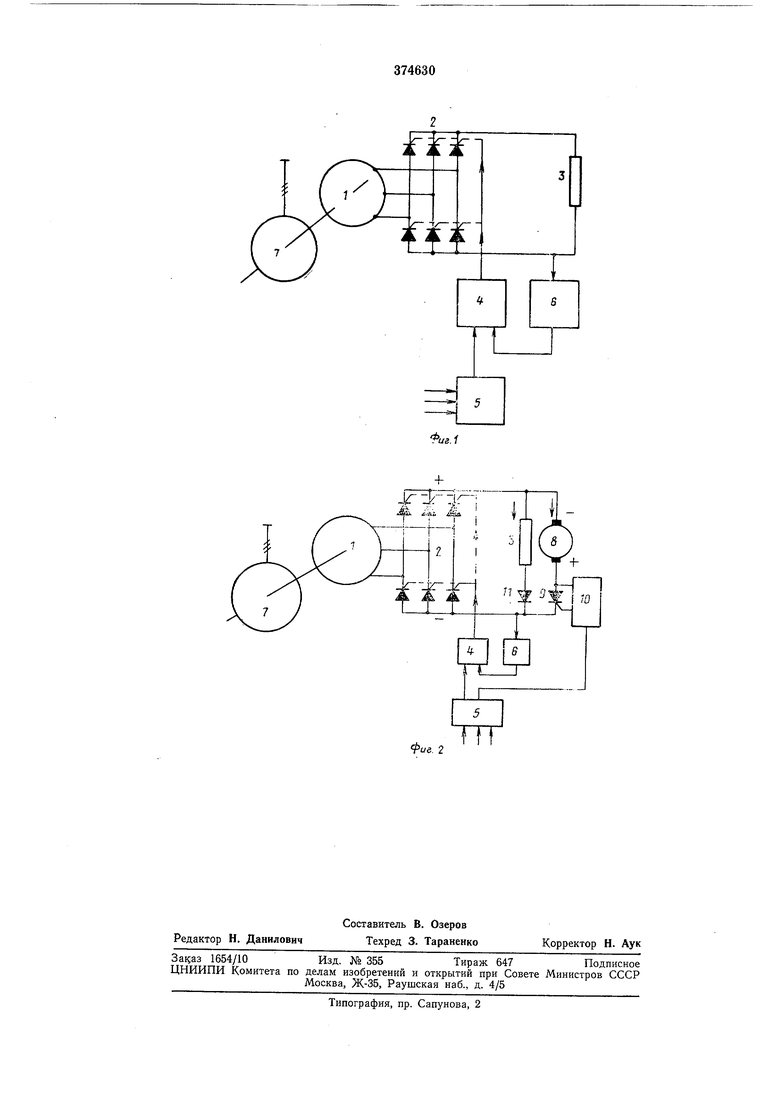
На фиг. 1 приведена схема предлагаемого 0 устройства; на фиг. 2-схема устройства со знакопеременным моментом сопротивления.
Устройство состоит из генератора переменного тока /, управляемого выпрямителя 2, нагрузочного резистора 3, блока управления 4, 5 модели приводного механизма 5, измерительного преобразователя мощности 6 и приводного двигателя 7.
Устройство работает следующим образом.
Оно представляет собой следящую систему, 0 которая воспроизводит требуемую величину момента. Изменением угла управления можно плавно регулировать величину выпрямленного напряжения на выходе выпрямителя 2 и, тем самым, величину выпрямленного тока Id в ре5 зисторе 3 в пределах от нуля до максимального значения. Управление работой тиристоров осуществляется блоком управления 4 в соответствии с разностью между сигналом, пропорциональным требуемому значению момен0 та, и сигналом обратной связи, пропорциональным фактическому моменту генератора. В качестве сигнала обратной связи по моменту используется напряжение, вырабатываемое измерительным преобразователем мощности 6, который включен на стороне постоянного тока.
В соответствии с конкретными требованиями по точности измерения момента могут быть также введены поправки на величину момента потерь в нагрузочном генераторе и выпрямителе и на величину скорости двигателя 7.
Сигнал, пропорциональный требуемому моменту, вырабатывается блоком моделирования 5 (моделью приводного механизма) как функция от скорости вращения двигателя, ускорения, времени, пути и т. д. Блок моделирования представляет собой математическую модель приводного механизма.
Приведенная на фиг. 1 схема модели не позволяет воспроизводить характеристики механизмов, со знакопеременным моментом сопротивления. Однако потребность в этом при моделировании энергосистем возникает редко. В случае такой необходимости в предложенную схе.му устройства должны быть дополнительно введены элементы, представленные на фиг. 2: вспомогательный источник постоянного тока 5; тиристор 9 с системой управления и искусственной коммутации 10; запорный диод 11 в цепи нагрузочного резистора.
При формировании положительного момента сопротивления Мс тиристор 9 закрыт. Управляемый преобразователь 2, работающий в выпрямительном режиме, нагружен на резистор 5.
При формировании отрицательного участка кривой момента нагрузки (см. фиг. 2) по сигналу модели приводного механизма 5 и блока управления 10 тиристор 6 открывается, включая в цепь источник постоянного тока 8. Блок управления 4, который в этом случае должен обеспечивать более широкий диапазон изменения угла управления, переводит преобразователь 2 в режим зависимого инвертора. Мощность передается от источника 8 через преобразователь 2 к мащине переменного тока, которая переходит в режим двигателя. Величина мощности задается моделью приводного механизма 5.
Быстродействие предлагаемого устройства обусловлено постоянной времени статорной цепи генератора переменного тока. Для упрощения приближенно принимают, что электромагнитные процессы при коммутации вентилей (нагрузки) не препятствуют мгновенному изменению активной электрической мощности. Допущение о мгновенном изменении электрической мощности означает отказ от учета, так называемых, апериодических слагающих тока и напряжения. Это допущение общепринято
при исследовании электромеханических процессов, поскольку постоянная времени статора на 2-3 порядка ниже электромеханических постоянных агрегата и электромагнитной постоянной обмотки возбуждения.
Быстродействие устройства обусловлено и применением в регулирующих и управляющих цепях почти безынерционных звеньев.
Точность воспроизведения момента обусловлена тем, что в управляемом преобразователе
2 имеется возможность воздействовать на вентиль, регулируя тем самым величину тока Id, в каждый период питающего напряжения. Поэто.му кривые моментов сложной формы можно воспроизводить с тем большей точностью,
чем выше частота нагрузочного генератора.
Применение в качестве нагрузочного генератора машины переменного тока расширяет функциональные возможности устройства в отношении величины момента модели и максимальной скорости агрегата, поскольку имеется возможность использовать бесконтактные высокооборотные синхронные мащины и асинхронные генераторы с емкостным самовозбуждением.
Предмет изобретения
Устройство для моделирования нагрузок на валу двигателя, содержащее нагрузочный резистор, подключенный ко входу измерительного преобразователя мощности, и модель приводного механизма, отличающееся тем, что, с целью повышения быстродействия и точности устройства, оно содержит генератор переменного тока, механически связанный с валом двигателя, выпрямитель, соединенный с выходом генератора переменного тока, и блок управления, выход которого подключен к выпрямителю, а входы соединены с моделью приводного механизма и измерительным преобразователем мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ПУЛЬСИРУЮЩЕЙ ИАГРУЗКИ ЭЛЕКТРОПРИВОДА | 1971 |
|
SU294155A1 |
| Устройство для отладки элементов бесщеточного возбудителя | 1989 |
|
SU1682944A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УСТАНОВИВШИХСЯ и ПЕРЕХОДНЫХ РЕЖИМОВ ЭНЕРГОСИСТЕМ | 1973 |
|
SU397938A1 |
| Устройство для моделирования нефтепромысловых механизмов | 1977 |
|
SU698013A1 |
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1797095A1 |
| Устройство для моделирования привода | 1983 |
|
SU1138814A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1982 |
|
SU1068757A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1971 |
|
SU310261A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2722689C1 |
--Г
.
Фие. 2
