СО 00 00
t11388
Изобретение относится к аналоговой вычислительной технике и предназначено для воспроизведения динамических характеристик при испытаниях приводов, , 5
Известно устройство для динамического моделирования нагрузок силовых следящих приводов, содержащее привод, гидродвигатель, блок стабилизации давления, следящую систему О и блок управления 1.
{Недостатками этого устройства являются большая потребляемая мощность, сложность, и невоспроизводимость импульсных воздействий. 15
Наиболее близким техническим решением к изобретению является устройство для моделирования приводов, содержащее блок моделирования скорости двигателя, выполненный в виде 20 суммирующего интегратора, двигатель, выход которого подключен к входу преобразователя угла поворота вала в напряжепие, выход которого соединен с первым входом суммирующего интег- 25 ратора, вмход которого Подключен к входу масштабного усилителя и является выходом устройства, вход заания момента нагрузки которого соеинен с вторым входом-суммирующего зо нтегратора, третий вход которого соединен с выходом масштабного усилителя С21.
Недостатком известного устройства является низкая точность воспро- ,, изведения динамическ11х и энергетических процессов в приводе,
Цель изобретения - повьпиение точности воспроизведения динамических знергеп-гческих процессов в приводе. О .
Поставленная цель достигается тем, что в устройство, содержащее блок моделирования скорости двигатея, выполненный в виде суг-мирующего . интегратора, двигатель, выход кото- 45 рого кинематически связан с входом преобразователя угла поворота вала двигателя в напряжение, выход которого соединен с цервым входом суг мнрующего интегратора, выход которого .50 подключен к входу масштабного усилителя и является выходом устройства, вход задания момента нагрузки которого соединен с вторым входом суммирующего интегратора, введен блок 55 моделирования влияния тока якоря двигателя, вьшолненный в В1ще сумматора, выход которого подключен к
142
входу двигателя, вход задания скорости устройства соединен с первым входом сумматора, второй вход которого подключен к выходу масштабного усилителя.
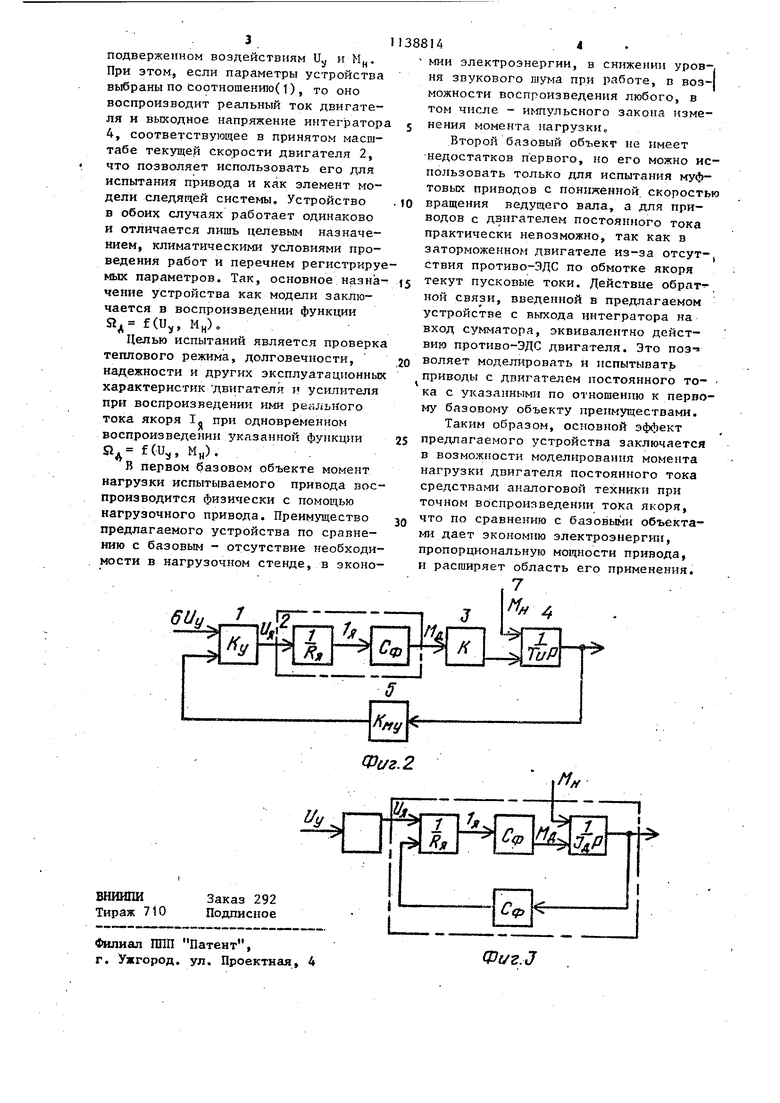
На фиг, 1 представлена функциональная схема предлагаемого устройства-, на фиг, 2 и 3 - структурные схемы устройства
Устройство содержит блок моделирования влияния тока якоря двигателя, выполненньй в виде сумматора 1, двигатель 2, преобразователь 3 угла поворота вала в напряжение, блок моделирования скорости двига.теля, выполненный в виде суммирующего интегратора 4, и масштабньй усилитель 5.
Устройство работает следующим образом
Сумматор 1 и двигатель 2 - реальные элементы испытываемого или моделируемого привода.
На фиг о 2 изображена структурная схема предлагаемого устройства, где Ку - коэффициент усиления сумматора 1 RJ, и Сф - сопротивление обмотки якоря и машинная постоянная двигателя 2 соответственно, К - крутизна преобразователя 3, Tj - постоянная времени интегратора 4, К д,, - коэффициент усиления мас1чтабного усилитля 5, и,,, - сигнал управления, М момент нагрузки, Uj, Ij и Яд - напряжение, ток и скорость двигателя соответственно.
На фиг, 3, приведена структурная схема незаторможенного двигателя 2. Чтобы структурные схемы предлагаемого устройства (фиг, 1) и двигателя (фиг, 3) былу эквивалентны, коэффициенты передачи их замкнутых контуров должны быть равны:
,,2
:Ф й.
откуда коэффициент усиления масштабного усилителя 5 равен
, (-4
где 1 - момент инерции привода,
приведенный в валу двигателя,
Работа устройства заключается в воспроизведении динамических процессов в реальном масштабе времени, происходящих в реальном приводе.
3
подверженном воздействиям U.. и М...
у п
При этом, если параметры устройства выбраны по соотношению(1), то оно воспроизводит реальный ток двигателя и выходное напряжение интегратор 4, соответствующее в принятом масштабе текущей скорости двигателя 2, что позволяет использовать его для испытания привода и как элемент модели следящей системы. Устройство в обоих случаях работает одинаково и отличается лишь целевым назначением, климатическими условиями проведения работ и перечнем регистрируемых параметров. Так, основное назначение устройства как модели заключается в воспроизведении функции Яд f(Uy, Мц),
Целью испытаний является проверка теплового режима, долговечности, надежности и других эксплуатационных характеристик двигателя и усилителя при воспроизведении ими рег лыгого тока якоря 1- при одновременном воспроизведении указанной функции Йд fCU,,, М„).
В первом базовом объекте момент нагрузки испытываемого привода воспроизводится физически с помощью нагрузочного привода. Преимущество предлагаемого устройства по сравнению с базовым - отсутствие необходимости в нагрузочном стенде, в эконо14. 4
мии электроэнергии, в снижении уров-. ня звукового шума при работе, в воз-1 можности воспроизведения любого, в том числе - и fflyльcнoгo закона кзменения момента нагрузки
Второй базовый объект не имеет недостатков первого, но его можно использовать только для испытания муфтовых приводов с пониженной скоростью
вращения ведущего вала, а для приводов с двигателем постоянного тока практически невозможно, так как в заторможенном двигателе из-за отсут-. ствия противо-ЭДС по обмотке якоря
текут пусковые токи. Действие обрат-. ной связи, введенной в предлагаемом устройстве с выхода интегратора на вход сумматора, эквивалентно действию противо-ЭДС двигателя. Это позволяет моделировать и испытывать
приводы с двигателем постоянного то- ка с указанными по отношению к первому базовому объекту преимуществами.
Таким образом, основной эффект предлагаемого устройства заключается в возможности моделирова гия момента нагрузки двигателя постоянного тока средствами аналоговой техники при точном воспроизведении тока якоря, что по сравнению с базовыми объектами дает экономию электроэнергии, пропорциональную мощности привода, и расширяет область его применения.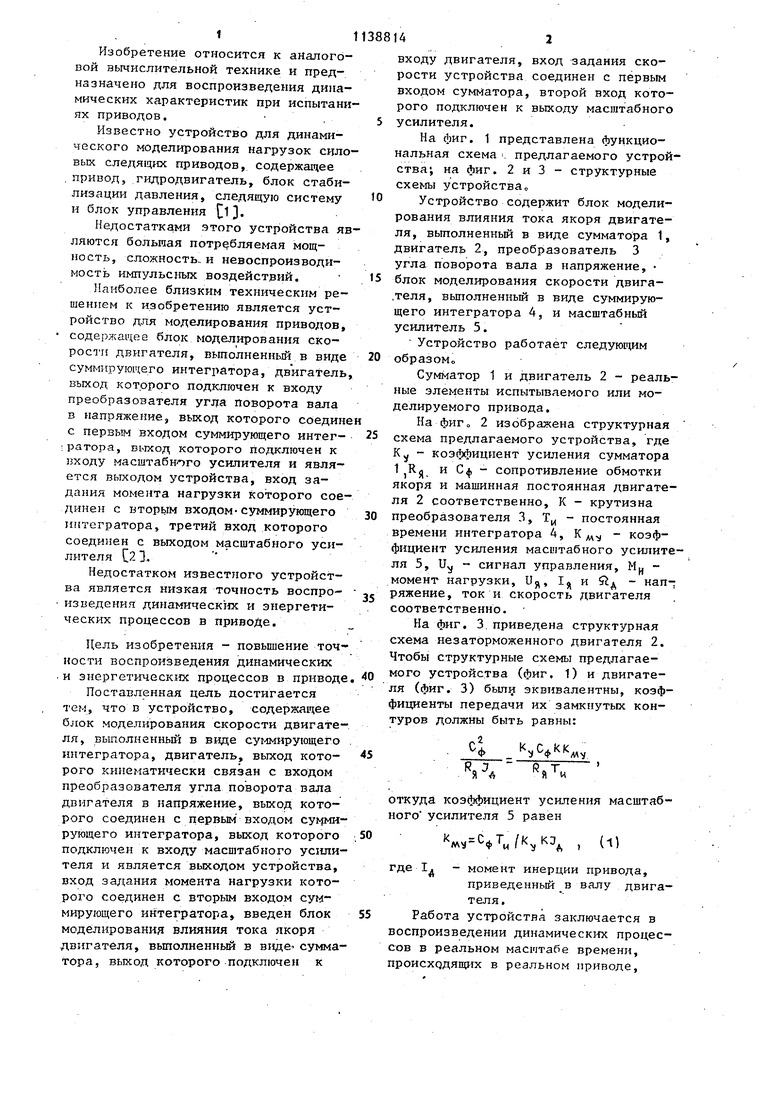
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1986 |
|
SU1314357A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Устройство для моделирования вентильных преобразователей | 1983 |
|
SU1137491A1 |
| Устройство для моделирования выходных сигналов судового гирокомпаса | 1984 |
|
SU1233189A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Следящая система | 1980 |
|
SU924662A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
УСТРОЙСТВО ДЛЯ МОЛЕЛ11РОВЛНИЯ ПРИВОЛА, содержащее блок моделирования скорости двигателя, вьшолненньтй в виде суммирующего интегратора, двигатель, выход которого кинематически связан с входом преобразователя угла поворота вала двигателя в напряжение, выход которого соединен с первым входом суммирующего интегратора, выход которого подключен к входу масштабного усилителя и является вькодом устройства, вход задания момента нагрузки которого соединен с вторьы входом суммирукяцего интегратора, отличающееся -тем, что, х; целью повышения точности, в него введен блок моделирования влияния тока якоря двигателя, выполненный в виде сумматора, выход которого подключен к входу двигателя, вход задания скорости устройства соединен с первым в входом сумматора, второй вход которого подключен к выходу масштабного усилителя.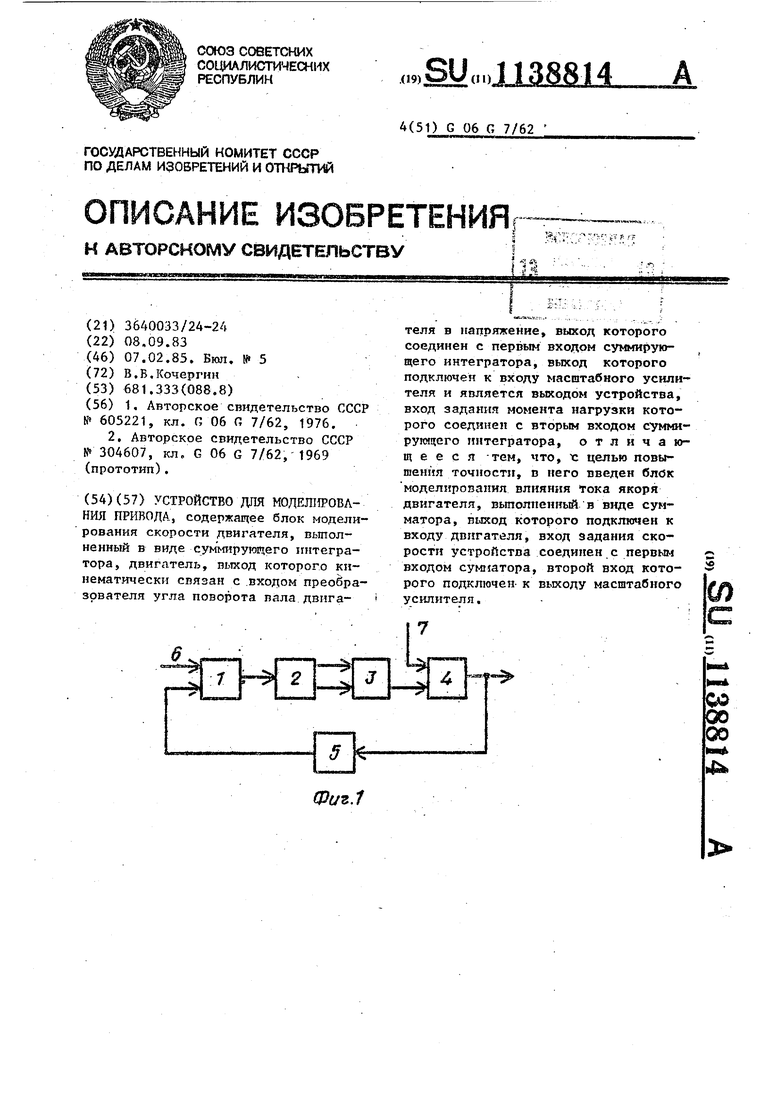
Фг/г.2
Mh
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для динамического моделирования нагрузок силовых следящих приводов | 1976 |
|
SU605221A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ ПРИВОДОВ | 0 |
|
SU304607A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
