Изобретение относится к электротехнике и может быть использовано в различных отраслях нромышленности: химической, гор- нодобываюн1ей, металлургической и других для регулирования скорости асинхронного электродвигателя.
Цель изобретения - упрощение и по- вып1ение быстродействия устройства.
На фиг. 1 представлена функциональная схема электропривода с трехфазным асинхронным двигателем; на фиг. 2 - функни- ональная схема электропривода с (нестифаз- ным асинхронным двигателем; на фиг. 3 -- функциональная схема блока определения выходного напряжения выпрямителя путем моделирования управляемого выпрямителя; на фиг. 4 - принципиальная схема датчика тока; на фиг. 5 - принципиальная схема блока определения падения напряжения на активных и индуктивных сопротивлениях преобразователя и двигателя; на фиг. 6 - векторная диаграмма асинхронного двигателя.
Функциональная схема электропривода (фиг. 1) содержит асинхронный двигатель 1, нодключенный трехфазной статорной обмоткой к выходу преобразовательной секции 2, состоян1ей из последовательно включенных управляемого выпрямителя 3, сглаживающего дросселя 4 и. автономного инвертора 5 тока, систем 6 и 7 управления соответственно выпрямителем и инвертором, датчика 8 напряжения, регулятора 9-тока, подключенного выходом к входу системы 6 управле- пия выпрямителем, а одним из своих входов - к выходу датчика 10 тока управляемого выпрямителя 3, множительно-дели- тельного блока 11, снабженного тремя входами и соединенного одним из своих входов с выходом датчика И) тока. Электропривод содержит также задающий генератор 12, подключенный своим выходом к входу
схемы 7 управления инвертором, а входом
к второму входу миожи 1 ельно-делительного блока 11 и выходу первого сумматора 13, связанного одним из своих входов с выхо- дом датчика 14 ЭДС двигателя, а другим входом с выходом регулятора 15 момента, подсоединенного одним из входов к выходу множите;1ьно-делите.1ьного блока 11, регулятор 16 скорости, нодключенный одним из входов к выходу задатчика 17 интенсивности, другим входомк выходу датчика 18 частоты вран1ения, а своим выходом регулятор 16 скорости нодключен к второму входу регулятора 15 момента и связан через блок 19 задания модуля статорного тока с вторым входом регулятора 9 тока, блок 20 определения выходного нанряжения выпрямнте:1я путем моде.чироваиия си;1оной части выпрямителя, блок 21 О11реде,лении проекции вектора ЭДС ротора на обобщенный вектор статорного тока и блок 22 он- ределения надения напряжется на активных и индуктивных сопротивлениях преобразователя и двигателя. Блок 20 одним из
5
0
0 5
0
5
5
0
своих входов подключен через датчик 8 напряжения к входу управляемого выпрямителя 3, другим входом - к выходу регулятора 9 тока, а выходом - к одному из входов блока 2 К второй вход которого через блок 22 нодключен к выходу датчика 10 тока, а выход блока 21 подсоединен к гретьему входу множитель 10-делительного б;1ока 1 1.
Функциональная схема электропривода с шести фазным асинхронным двигателем ((1)И1 2) содержит допо,;п1ительно вторую преобразовательную секцию 23, выполненную идентично секции 2 и подключенную выходом к второй трехфазной статорной обмотке шестифазного асинхронного ДЕШгателя 1, причем входы систем 7 унравления инвертором, вторые входы множительно-делитель- ных блоков И, вторые входы регуляторов 9 тока первой 2 и второй 23 нреобразователь- Н1з1х секций связаны понарно между собой со- o l BeTCTBeiiHO, а выход множнтельно-делитель- ного блока 1 1 второй преобразовательной секции 23 нодк.пючен к третьему входу регулятора 15 момента.
В качестве возможного варианта входы феобразовательных секций 2 и 23 подключены к питающей сети через вторичные обмотки трехобмоточного трехфазного гранс- форматора 24 (с соединением обмоток звезда-звезда и звезда - треугольник).
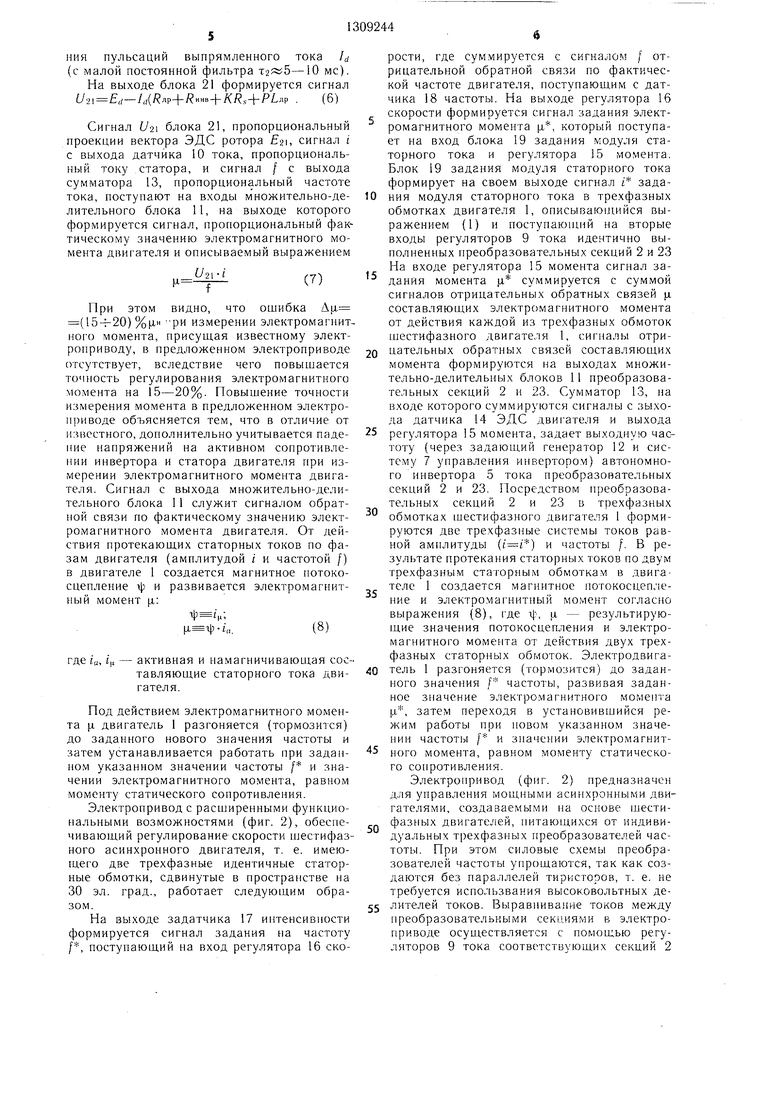
Функщюнальная схема Г).:1ока онреде.пе- ния выходного напряжения выпрямителя путем моделирования управляемого выпрямителя 20 (фиг. 3} содержит пос. едователь- но соединенные сумматор 25, функциои.аль- ный нреобразователь 26 н множительное звено 27.
11ринциниальная схема датчика 10 тока (фиг. 4), являющаяся одним из возможных вариантов вынолнения, содержит транс- фюрматоры 28-30 тока, соединенные одними из выход1Ц 1х клемм в звезду, а дру- I HMn - - с входами трехфазного выпрями- те.чьного моста 31, соеднненного 1 ыходом с нагрузочным резистором 32.
Принципиальная схе.ма датчика 8 жения анало1 нчна схеме датчика 10 тока (. 4), однако трансформаторы 28-30 выполнены в виде трансформаторов нанряже- ння. При этом фазы первичной обмотки нодклк)чены к фазам питающей сепи, а фазы вторичной обмоткн -- к выпрямительному мосту 31.
Принципиальная схема блока онределе- ння падения напряже15ия на акт11вн1з1х и индуктивных сопротивлениях преобразователя : двигателя 22 (фиг. 5), представ,ляющая один из возможных вариантов выполнения, содержит операционный усилитель 33, входные цепи по инвертирующему г.ходу у которого выполнен) в виде парал.чельно включенных цепочек из резистора 34 и последовательно соединенных резистора 35 н конденсатора 36, при этом неимвертируюший вход
усилителя 33 через резистор 37 подключен к общей шине питания, а между выходом усилителя 33 и его инвертирующим входом подключен резистор 38.
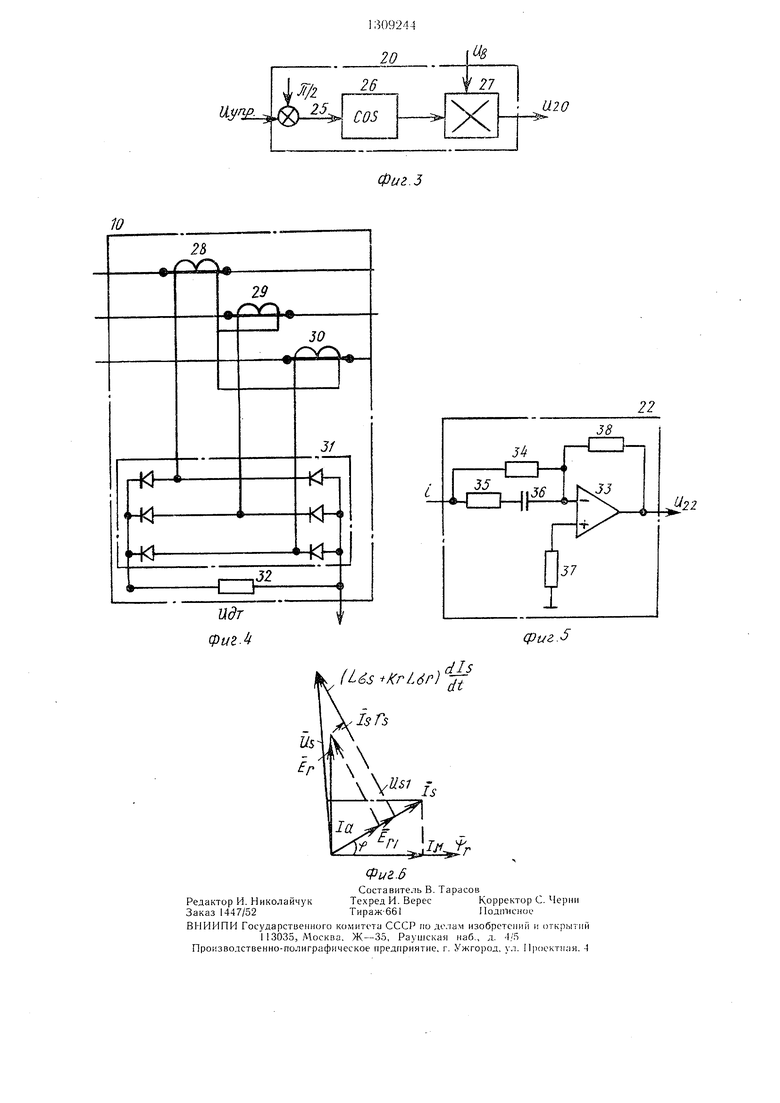
На векторной диаграмме асинхронного двигателя (фиг. 6) приняты следующие обозначения: ijjr - обобщенный вектор по- токосцепления ротора; Ег - обобщенный век тор ЭДС ротора, /S - обобщенный вектор статорного тока, /ц, /,, - соответственно активная и намагничивающая составляю- щие статорного тока, ф - угол между векторами статорного тока и потокосцеп- ления ротора.
Электропривод работает следующим образом.
На выходе задатчика 17 интенсивности (фиг. 1) формируется сигнал задания на частоту /, поступающий на вход регулятора 16 скорости, где суммируется с сигналом / отрицательной обратной связи по фактической частоте двигателя, поступающим с датчика 18 частоты. На выходе регулятора 16 скорости формируется сигнал задания электромагнитного момента ji, который поступает на входы блока 19 задания модуля статорного тока и регулятора 15 момента, Последний может иметь интегральную, пропорционально-интегральную и другие виды характеристик. Блок 19 задания модуля статорного тока формирует на своем выходе сигнал г задания модуля статорного тока электродвигателя в виде
г V M + г .
где /ц - сигнал задания намагничивающей (реактивной) составляющей статорного тока (г| const соответствует заданию режима постоянства пото- косцепления электродвигателя); - сигнал задания активной составляющей статорного тока. На входе регулятора 15 момента сигнал задания момента i суммируется с сигналом отрицательной обратной связи ц по фактическому моменту двигателя, поступающим с выхода множительно-делительного блока 11. На входе регулятора 9 тока сигнал / суммируется с сигналом отрицательной об- ратной связи по фактическому значению модуля тока статора i, поступающим с датчика 10 тока (фиг. 4). Регулятор 9 тока воздействует через систему 6 управления выпрямителем на угол регулирования тиристоров управляемого выпрямителя 3 пре- образовательной секции 2 так, что фактическое значение модуля статорного тока электродвигателя поддерживается на заданном уровне: .
Сигнал с выхода регулятора 15 момента поступает на один из входов сумматора 13, на другой вход которого поступает сигнал с выхода датчика 14 ЭДС. Последний может быть выполнен также в виде датчика скорости. При этом с выхода регулятора 15 момента является сигналом задания ско.;1ьжения двигателя, а в с. П чае датчика 14 ЭДС выходной сигна.п pei-y- лятора 15 момента является сигналом -;ор- рекции частоты тока двигателя в переходных режимах. При этом в установившемся режиме выходная частота инвертора задается уровнем сигнала с выхода датчика 14 ЭДС или суммой сигналов с выхода датчика 14 скорости и сигна.ча задания скольжения с выхода peгyv ятopa 15 момента. Сигнал с выхода сумматора 13 поступает на вход задающего генератора 12, который через систему 7 управления инвертором задает частоту (фазу) выходного тока инвертора. Внещний датчик 18 может быть выполнен в виде датчика частоты, скорости или ЭДС двигателя. На входы б.чока 20 моделирования управляемого выпрямите.мя (фиг. 3) поступают сигналы с выхода датчика 8 напряжения сети и jiery. iHTopa 9 тока. На выходе блока 20 формируется аналоговый сигнал L an, пропорциональный выходному напряжению управляемого выпрями- теля 3,-
t/M f KCos(L/y.ip4-n/2)
20г 30
355 50
или
U2(, U,-K-Uy f.()
где {Ув -сигнал, пропорциональный напряжению на входе управляемого аы- прямителя, поступающий с датчика 8 напряжения питающей сети; (Уу р-сигнал управления системой 6 им- пульсно-фазового управления выпрямителя, поступающий с В1)1хода регулятора 9 тока.
Вид выражений (2) или (3) определяется формой опорного напряжения системы 6 импульсно-фазового управления соответственно для пилообразной и синусоидальной форм опорного напряжения. Сигнал Uw с выхода блока 20 моделирования управляемого выпрямителя поступает на один из входов блока 21, где суммируется с выходным сигналом U2-2 блока 22 (фиг. 5). При этом выходной сигнал блока 22 описывается выражением
,,(..+PL.p
/,,(/ экв+Р/.др .
Передаточная функция этого блока имеет
вид
W,K
Т, Р
Т2Я+Г R-9KB
(5)
К
СзбПервое слагаемое передаточной функции (5) характеризует собой пропорциональную часть, а второе слагаемое - дифференциальную с запаздыванием. ЗапаЗлТ,ывапие при дифференцировании служит для сглаживаНИИ пульсаций выпрямленного тока /
(с малой постоянной фильтра мс).
На выходе блока 21 формируется сигнал
U.,E,, - I,,(Rлp+R +KRs + .(6)
Сигнал U-2 блока 21, пропорциональный проекции вектора ЭДС ротора 21, сигнал i с выхода датчика 10 тока, пропорциональный току статора, и сигнал / с выхода сумматора 13, пропорциональный частоте тока, поступают на входы множительно-де- лительного блока 11, на выходе которого формируется сигнал, пропорциональный фактическому значению электромагнитного момента двигателя и описываемый выражением
и
21-г
f
(7)
При этом видно, что ошибка Аи, () %|1 ри измерении электромагнитного момента, присуш,ая известному электроприводу, в предложенном электроприводе отсутствует, вследствие чего повышается точность регулирования электромагнитного момента на 15-20%. Повышение точности измерения момента в предложенном электро- 111)иводе объясняется тем, что в отличие от известного, дополнительно учитывается падение напряжений на активном сопротивлении инвертора и статора двигателя при измерении электромагнитного момента двигателя. Сигнал с выхода множительно-дели- тельного блока 11 служит сигналом обратной связи по фактическому значению электромагнитного момента двигателя. От действия протекаюпхих статорных токов по фазам двигателя (амплитудой / и частотой /) в двигателе 1 создается магнитное потоко- сцепление и развивается электромагнитный момент л:
i|.; )-г„,(8)
где Га, J|. - активная и намагничиваЕОщая составляющие статорного тока двигателя.
Под действием электромагнитного момента jj, двигатель 1 разгоняется (тормозится) до заданного нового значения частоты и затем устанавливается работать при заданном указанном значении частоты f и значении электромагнитного момента, равном моменту статического сопротивления.
Электропривод с расширенными функциональными возможностями (фиг. 2), обеспечивающий регулирование скорости п естифаз- ного асинхронного двигателя, т. е. имеющего две трехфазные идентичные статор- ные обмотки, сдвинутые в пространстве на 30 эл. град., работает следующим образом.
На выходе задатчика 17 интенсивности формируется сигнал задания на частоту /, поступающий на вход регулятора 16 скорости, где суммируется с сигналом f отрицательной обратной связи по фактической частоте двигателя, поступающим с датчика 18 частоты. На выходе регулятора 16 скорости формируется сигнал задания электромагнитного момента |а,, который поступает на вход блока 19 задания модуля статорного тока и регулятора 15 момента. Блок 19 задания модуля статорного тока формирует на своем выходе сигнал i задания модуля статорного тока в трехфазных обмотках двигателя 1, описывающийся выражением (1) и поступаюншй на вторые входы регуляторов 9 тока идентично выполненных преобразовательных секций 2 и 23 На входе регулятора 15 момента сигнал задания момента р, суммируется с суммой сигналов отрицательных обратных связей ji составляющих электромагнитного момента от действия каждой из трехфазных обмоток шестифазного двигателя 1, сигналы отри0 нательных обратных связей составляющих момента формируются на выходах множи- тельно-делительных блоков 11 преобразовательных секций 2 и 23. Сумматор 13, на входе которого суммируются сигналы с зыхо- да датчика 14 ЭДС двигателя и выхода
5 регулятора 15 момента, задает выходную частоту (через задающий генератор 12 и систему 7 управления инвертором) автономного инвертора 5 тока преобразовательных секций 2 и 23. Посредством преобразовательных секций 2 и 23 в трехфазных
обмотках шестифазного двигателя 1 формируются две трехфазные системы токов равной амплитуды (() и частоты /. В результате протекания статорных токов по двум трехфазным статорным обмоткам в двигателе 1 создается магнитное потокосцепле- ние и электромагнитный момент согласно выражения (8), где г, а - результирующие значения потокосцепления и электромагнитного момента от действия двух трехфазных статорных обмоток. Электродвига0 тель 1 разгоняется (тормозится) до заданного значения / частоты, развивая заданное значение электромагнитного момента Л, затем переходя в установившийся режим работы при ново.м указанном значении частоты / и значении электромагнит5 ного момента, равном моменту статического сонротивления.
Электропривод (фиг. 2) предназначен для управления мощными асинхронными двигателями, создаваемыми на основе шести- фазных двигателей, питающихся от индивидуальных Т1)ехфазных преобразователей частоты. При этом силовые схемы преобразователей частоты упрощаются, так как создаются без параллелей тиристоров, т. е. не требуется использвания высоковольтных де5 лителей токов. Выравнивание токов между преобразовательными секциями в электроприводе осуществляется с помощью регуляторов 9 тока соответствующих секций 2
5
и 23. Для улучшения гармонического состава кривой магнитного потока в воздушном зазоре шестифазного двигателя 1, а значит, для уменьшения пульсаций результирующего электромагнитного момента и снижения потерь от высших гармонических составляюших тока в двигателе системы 7 управления инвертором могут быть выполнены со сдвигом выходных импульсов управления в 30 эл. град, выходной частоты, что обеспечивает соответствующий сдвиг в 30 эл. град, статорных токов фаз трехфазных обмоток двигателя 1. С целью уменьшения влияния работы мощного электропривода на искажение питающей сети преобразовательные секции 2 и 23 питаются от трехобмоточного трансформатора 24 с соединением вторичных трехфазных обмоток звезда-звезда и звезда-треугольник.
Повышение быстродействия электропривода достигается в результате повышения значения регулируемого электромагнитного мо- мента в динамических режимах электропривода. Это обеспечивается за счет увеличения точности измерения фактического значения электромагнитного момента (на 15- 20%) путем учета падений напряжений и мощности на активных сопротивлениях инвертора и статора двигателя. В результате повышения точности измерения сигнала электромагнитного момента фактический момент двигателя, поддерживаемый замкнутой системой регулирования электромагнитного момента, увеличивается в динамических режимах на 15-20%. Увеличение электромагнитного момента привода в указанных пределах позволяет сократить пропорционально времени разгона и торможения до 20%, а значит, и повысить производительность рабочих механизмов, работающих в интенсивных пуско-тормозных режимах до 20%.
Упрощение электропривода достигается за счет того, что отсутствует датчик напряжения, установленный на входе автономного инвертора, т. е. исключается необ- ходимость реализации в датчике напряжения гальванической развязки на постоянном токе, обусловленной сложностью для высоковольтных преобразователей частоты. Для получения информации о текущем значении напряжения в предложенном электроприводе используется датчик напряжения, подключенный к питающей сети переменного напряжения постоянной частоты, который значительно проще в отношении гальванической развязки (возможно применение обычных трехфазных трансформаторов напряжения) и не требует дополнительных сложных устройств высокочастотной модуляции- демодуляции. Также в качестве датчика напряжения питающей сети может быть использован синхронизирующий трансформа- тор системы управления выпрямителем, подключаемый вторичными обмотками к диодному выпрямительному мосту (фиг. 4), т. е.
5
5
0
0 5
0
5
0
не требуется дополнительного усложнения электропривода). Таким образом, в данном электроприводе вместо технически сложного, дорогого высоковольтного датчика напряжения с гальванической развязкой ис1К), 1ьзу- ются более дешевые блоки моделирования и блок определения проекции вектора ЭДС ротора на обобщенный вектор сети статор- ного тока, что упрощает электропривод и снижает его стоимость.
Построение электропривода в виде двух преобразовательных секций, не требующих внутри секции параллельного включения силовых тиристоров, юзволяет увеличить мощность без технического усложнения устройствами деления токов путем осуп1ествле- ния выравнивания токов между преобразовательными секциями средствами автоматического регулирования. Улучшение гармонического состава магнитного поля в воздушном зазоре, уменыиение пульсаций электромагнитного момента двигателя и снижение потерь в двигателе от высших гармонических составляющих статорного тока достигается в электроприводе с шестифазным двГь гателем за счет создания средствами управления инвертором электрического сдвига в 30 эл. град, между токами, питающими трехфазные статорные обмотки электродвигателя.
Формула изобретения
1. Электропривод, содержащий асинхронный двигатель, подключенный трехфазной статорной обмоткой к выходу преобразовательной секции, состоящей из последовательно включенных управляемого выпрямителя, сглаживающего дросселя и автономного инвертора тока, систем управления выпрямителем и инвертором, датчика напряжения, регулятора тока, подключенного выходом к входу системы управления вынря- мителем, а одним из своих входов - к выходу датчика тока управляемого выпрямителя, множительно-делительного блока, снабженного тремя входами и соединенного одним из своих входов с выходом датчика тока, задаюп ий генератор, подключенный своим .выходом к входу системы управления инвертором, а входом -- к второму входу множительно-делительного блока и выходу сумматора, связанному из своих входов с выходом датчика ЭДС двигателя, а другим входом - с выходом регулятора момента, подсоединенного одним из входов к выходу множительно-делительного блока, регулятор скорости, подключенный одним из входов к выходу задатчика интенсивности, другим входом - к выходу датчика частоты вращения, а своим выходом регулятор скорости подключен к второму входу регулятора момента и связан через блок задания модуля статорного тока с вторым
входом регулятора тока, отличающийся тем, что, с целью упрощения и повышения быстродействия, в преобразовательную секцию электропривода введены блок определения выходного напряжения выпрямителя путем моделирования силовой части выпрямителя, блок определения проекции вектора ЭДС ротора на обощенный вектор статорного тока, выполненный в виде сумматора с двумя входами, и блок определения падения напряжения на активных и индуктив- ных элементах преобразовательной секции и асинхронного двигателя, причем один вход блока определения выходного напряжения выпрямителя подключен через датчик напряжения к входу управляемого выпрямителя, другой вход указанного блока - к выходу регулятора тока, а выход - к одному из входов блока определения проекции вектора ЭДС ротора на обощенный вектор статорного тока, второй вход которого через блок определения падения напряжения на активных и индуктивных сопротивлениях преобразователя и двигателя, выполненный в
виде пропорционально-дифференцирующего звена, подключен к выходу датчика тока, а выход блока определения проекции вектора ЭДС ротора на обощенный вектор статорного тока подсоединен к третьему входу множительно-делительного блока.
2. Электропривод по п. 1, отличающийся тем, что, с целью улучшения энергетических показателей и уменьшения пульсаций момента, асинхронный двигатель снабжен второй трехфазной статорной обмоткой и введена вторая преобразовательная секция аналогичная первой и подключенная выходом к второй трехфазной обмотке асинхронного двигателя, а регулятор момента снабжен третьим входом, причем входы систем управления инвертором, вторые входы множи- тельно-делительных блоков, вторые входы регуляторов тока первой и второй преобразовательных секций связаны попарно между собой, а выход множительно-делительного блока второй преобразовательной секции подключен к третьему входу регулятора момента.
Фаг. 2
Фиг. 5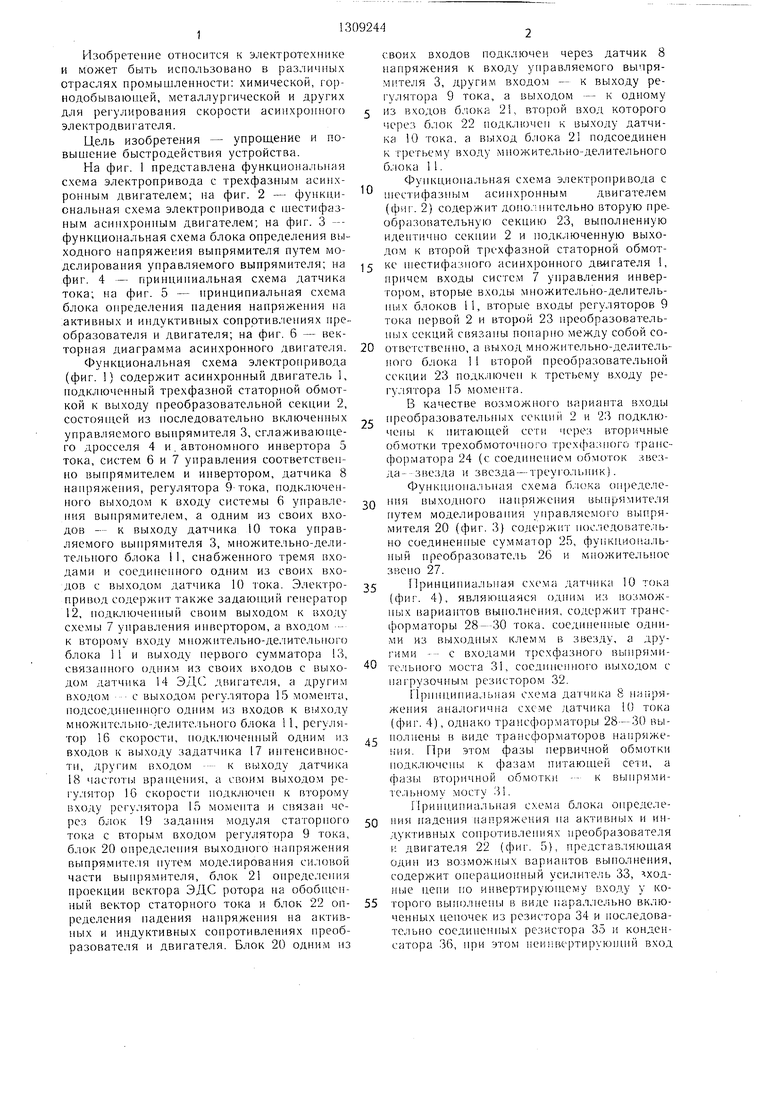


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1986 |
|
SU1372580A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ВРАЩАТЕЛЬНОГО ИЛИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2460190C1 |
Изобретение относится к электротехнике и может быть использовано в химической, горнодобывающей, металлургической и других отраслях промышленности. Целью изобретения является упрои ение и новьпне- ние быстродействия. Указанная цель достигается введением в преобразовательную секцию 2 электропривода двухвходового блока 20 определения выходного напряжения выпря.ми- теля 3, блока 21 определения нроекции вектора ЭДС ротора на обобпгенный вектор статорного тока асинхронного двигателя (АД) 1 и блока 22 определения падения напряжения на активных и индуктивных элементах АД 1. Введение указанных блоков обеспечивает увеличение точности измерения фактического значения момеп- та путем учета паде1И Й напряжений и мощности на активных сонротивлениях инвертора и статора АД 1. Увеличение момента приводит к сокращению времени разгона и торможения и повыи1е1П1Ю производительности рабочих механизмов. 1 з.п. ф-лы, 6 ил. S S (Л со о CD ГО . 4: Фиг. 1
J2
идт ФигЛ
сриг. З
(Us KrLdr} IlL r
Фиг.5
Составитель В. Тарасов
Редактор И. НиколайчукТехред И. ВересКорректор С. Черни
Заказ 1447/52Тираж-661Подписное
ВНИИПИ Государственного комитета СССР но делам изобретени н открытий
I 13035, Москва, Ж-35, PayuicKasi наб., д. -1/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 1182987, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЕК Anters «Variable Speed ас drives for sever enviranments | |||
| - Elestrical Engi- neen, October 1978, № 10, p | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
