1
Известны способы управления группой импульсных регуляторов, синхронизированных между собой со взаимным фазовым сдвигом и с независимым изменением скважности импульсов напряжения на нагрузке каждого регулятора в отдельности.
Недостатком известных способов управления группой импульсных регуляторов является неизменность фазового угла сдвига между регуляторами, что не позволяет увеличить результирующий коэффициент мощности регуляторов на всем диапазоне изменения скважности.
Для повышения результирующего коэффициента мощности группы регуляторов по предлагаемому способу синхронизацию осуществляют поочередно-последовательным включением последующих регуляторов при отключении предыдущих регуляторов.
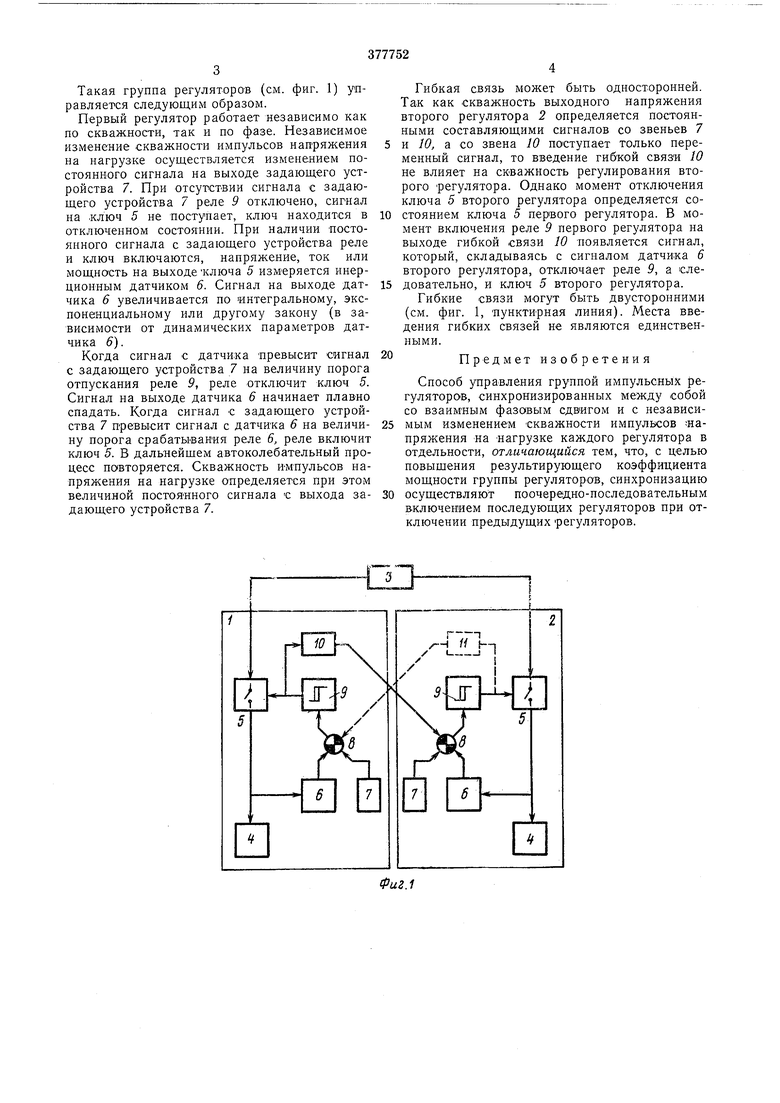
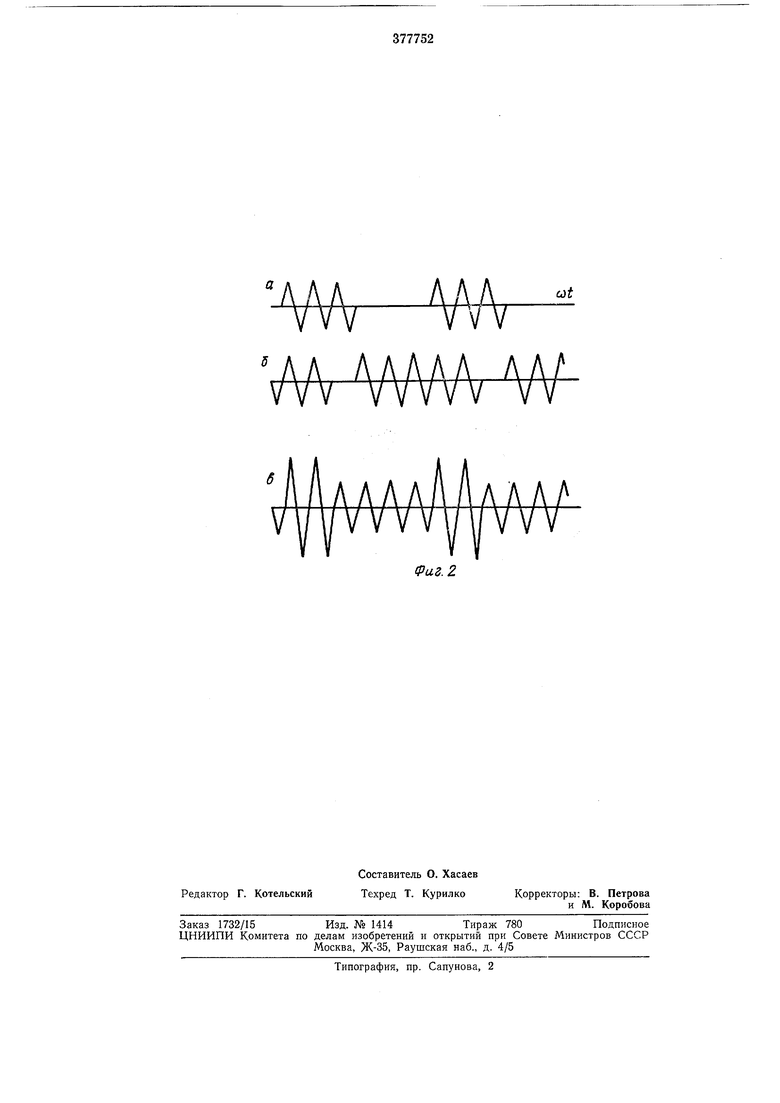
На фиг. 1 дана схема одного из возможных вариантов реализации предлагаемого способа управления группой, состоящей из двух импульсных регуляторов; на фиг. 2 приведены диаграммы токов при параллельной работе двух регуляторов.
Один из регуляторов группы работает с требуемой скважностью выходного напряжения независимо от другого регулятора (см. фиг. 2а) и является ведущим по отношению к последующем} регулятору. Второй регулятор
работает также с независимым изменением скважности выходного напряжения. Однако моменты его включения жестко синхронизированы с моментами отключения первого регулятора (см. фиг. 26), поэтому он является ведомым по отношению к первому регулятору. Возможна также сивхронизация моментов отключения ведомых с моментами включения ведущих регуляторов. В обоих
случаях диаграмма результирующего тока потребления выглядит как «а фиг. 2в.
Если группа состоит из нескольких регуляторов, то синхронизацию осуществляют поочередно-последовательным включением последующих регуляторов при отключении предыдущих регуляторов.
Синхронизация -каждого последующего регулятора с предыдущим регулятором МОжет быть осуществлепа с помощью гибкой связи.
Пзсть группа состоит из двух одинаковых релейных регуляторов } и 2, каждый из которых содержит источник 3 питания постоянного или переменного тока, от которого питаются нагрузки 4; ключи 5 переменного или постоянного тока, датчики 6 напряжения, тока или мощности с инерционными или интегрирующими выходами, задающие устройства 7, узлы 8 сравнения, релейные элементы 9,
гибкие связи 10 и 11.
Такая группа регуляторов (см. фиг. 1) управляется следующим образом.
Первый регулятор работает независимо как по скважности, так и по фазе. Независимое изменение скважности импульсов напряжения на нагрузке осуществляется изменением постоянного сигнала на выходе задающего устройства 7. При отсутствии сигнала с задающего устройства 7 реле 9 отключено, сигнал на .ключ 5 не поступает, ключ находится в отключенном состоянии. При наличии постоянного сигнала с задающего устройства реле и ключ включаются, напряжение, ток или мощность на выходеключа 5 изм-еряется инерционным датчиком 6. Сигнал на выходе датчика 6 увеличивается по интегральному, экспоненциальному или другому закону (в зависимости от динамических параметров датчика 6).
Когда сигнал с датчика превысит сигнал с задающего устройства 7 на величину порога отпускания реле 9, реле отключит ключ 5. Сигнал на выходе датчика 6 начинает плавно спадать. Когда сигнал с задающего устройства 7 превысит сигнал с датчика 6 на величину порога срабатывания реле 6, реле включит ключ 5. В дальнейшем автоколебательный процесс павторяется. Скважность импульсов напряжения на нагрузке определяется при этом величиной постоянного сигнала с выхода задающего устройства 7.
Гибкая связь может быть односторонней. Так как скважность выходного напряжения второго регулятора 2 определяется постоянными составляющими сигналов со звеньев 7
и 10, а со звена 10 поступает только переменный сигнал, то введение гибкой связи 10 не влияет на скважность регулирования второго регулятора. Однако момент отключения ключа 5 второго регулятора определяется состоянием ключа 5 первого регулятора. В момент включения реле 9 первого регулятора на выходе гибкой связи 10 появляется сигнал, который, складываясь с сигналом датчика 6 второго регулятора, отключает реле 9, а следовательно, и ключ 5 второго регулятора.
Гибкие связи могут быть двусторонними (см. фиг. 1, Пунктирная линия). Места введения гибких связей не являются единственными.
Предмет изобретения
Способ управления группой импульсных регуляторов, синхронизированных между собой со взаимным фазовым сдвигом и с независимым изменением скважности импульсов ;напряжения на нагрузке каждого регулятора в отдельности, отличающийся тем, что, с целью повыщения результирующего коэффициента мощности группы регуляторов, синхронизацию осуществляют поочередно-последовательным включением последующих регуляторов при отключении предыдущих регуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗИРОВАННОГО УПРАВЛЕНИЯ ШИРОТНО- ИМПУЛЬСНЫМ РЕГУЛЯТОРОМ | 1973 |
|
SU395826A1 |
| Система управления группой импульсных регуляторов | 1976 |
|
SU588613A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМОМ РАБОТЫ ПЛАЗМОТРОНА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389055C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
| Устройство для управления группой импульсных преобразователей | 1981 |
|
SU1001433A1 |
| Способ управления преобразователем частоты,работающим на группу нагрузок и устройство для управления преобразователем частоты,работающим на группу нагрузок | 1982 |
|
SU1061234A1 |
| Устройство для питания нагрузки постоянным током | 1980 |
|
SU965296A1 |
| Способ управления двумя тиристорными преобразователями | 1976 |
|
SU632046A1 |
| Устройство для управления многофазным импульсным регулятором | 1978 |
|
SU758468A1 |
| Способ управления стабилизированным преобразователем постоянного напряжения в переменное | 1990 |
|
SU1798878A1 |
ut
