1
Изобретение относится к устройствам управления, а именно к электрогидравлическим однокаскадным преобразователям, предназначенным для управления тидравлическими двухвходовами исполнительными механизмами.
Известны преобразователи, содержащие электромеханический преобразователь и гидравлический усилитель мощности, выполненный в виде соединенных по мостовой схеме двух дифференциальных узлов типа «соплозаслонка, заслонки которых соединены с поворотным якорем электромеханического преобразователя узлом кинематической связи.
В известных устройствах центр вращения якоря не совпадает с его центром тяжести, что приводит к увеличение момента инерции якоря относительно оси вращения, и, следовательно, к уменьшению его собственной частоты.
Цель изобретения - улучшение динамических характеристик преобразователя.
В предлагаемом устройстве узлы типа «сопло-заслонка расположены в камерах, одна из которых соединена с каналом питания, другая - с каналом слива; узел кинематической связи выполнен в виде трубчатого торсиона, концы которого соединены с корпусом, а средняя часть жестко связана с якорем. Внутри торсиона размещен жестко соединенныи с якорем валик, концы которого связаны с заслонками усилителя мощности.
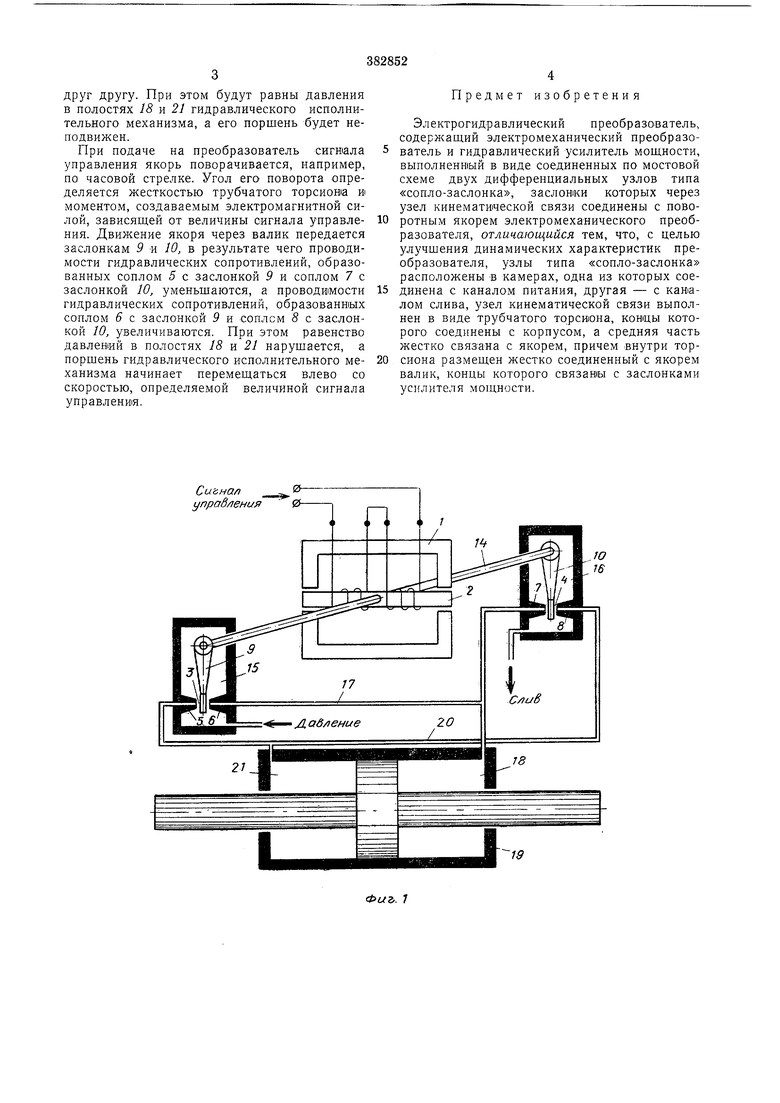
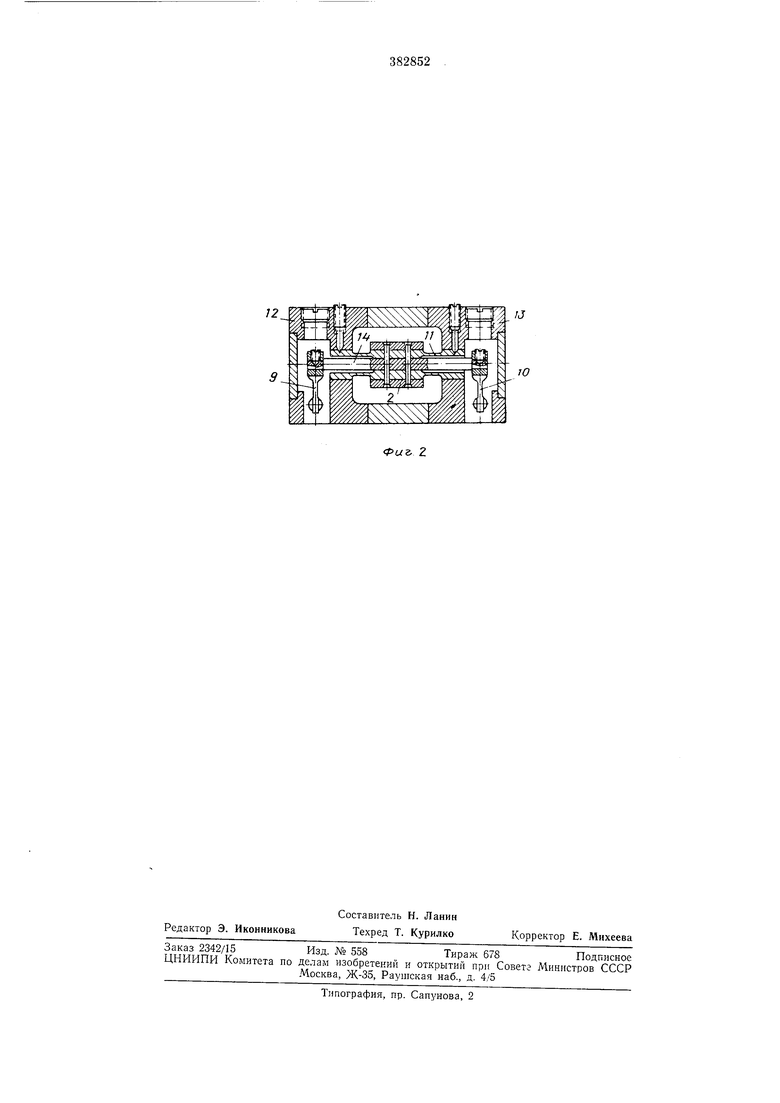
На фиг. 1 представлена общая схема устройства; на фиг. 2 - схема узла кияематической связи.
Электрогидравлический преобразователь состоит из электромеханического преобразователя 1 с поворотным якорем 2 и гидравлического усилителя мощности на двух дифференциальных узлах типа «сопло-заслонка, содержащих соответственно сопла 5, 6 vi 7, S И1 заслонки 9 и Ю. Якорь 2 жестко закреплен на средней части трубчатого торсиойа 11, KOHIцы которого, в свою очередь, закреплены в неподвижных стойках 12 и 13 корпуса. Внутри торсиона свободно проходит валик 14, лсестко скрепленный с якорем и несущий на свободных концах заслонки 9 и 10. Заслонка 9 расположена в камере 15, соединенной с источником давления, а заслонка 10-в камере 16, соединенной со сливом. Сопло 6 соединено каналом 17 с соплом 7 и полостью 18 гидравлического исполнительного механизма 19; сопло 5 - каналом 20 с соплом 8 и полостью 21 механизма 19.
Преобразователь отрегулирован таким образом, чтобы при нулевом сигнале управлен1ия проводимости гидравлических сопротивлений, образованных заслонкой 9 с соплами 5 и б в заслонкой 10 с соплами 7 и S, были равны
друг другу. При этом будут равны давления в полостях 18 и 21 гидравлического исполнительного механизма, а его поршень будет неподвижен.
При подаче на преобразователь сигн1ала управления якорь поворачивается, например, по часовой стрелке. Угол его поворота определяется жесткостью трубчатого торсиова и моментом, создаваемым электромагнитной силой, зависящей от величины сигнала управления. Движение якоря через валик передается заслонкам 9 и 10, в результате чего проводимости гидравлических сопротивлений, образованных соплом 5 с заслонкой 9 и соплом 7 с заслонкой 10, уменьшаются, а проводимости гидравлических сопротивлений, образованных соплом 6 с заслонкой 9 и соплом 8 с заслонкой 10, увеличиваются. При этом равенство давлений в полостях 18 и 21 нарушается, а поршень гидравлического исполнительного механизма начинает перемещаться влево со скоростью, определяемой величиной сигнала управления.
Предмет изобретения
Электрогидравлический преобразователь, содержащий электромеханический преобразователь и гидравлический усилитель мощности, выполненвый в виде соединенных по мостовой схеме двух дифференциальных узлов типа «сопло-заслонка, заслонки которых через узел кинематической связи соединены с поворотным якорем электромеханического преобразователя, отличающийся тем, что, с целью улучшения динамических характеристик преобразователя, узлы типа «сопло-заслонка расположены в камерах, одна из которых соединена с каналом питания, другая - с каналом слива, узел кинематической связи выполнен в виде трубчатого торсиюна, концы которого соединены с корпусом, а средняя часть жестко связана с якорем, причем внутри тор0 сиона размешен жестко соединенный с якорем валик, концы которого связаны с заслонками усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический преобразователь | 1979 |
|
SU954641A2 |
| Электрогидравлический усилитель мощности | 1977 |
|
SU781405A1 |
| Электрогидравлический усилитель мощности | 1981 |
|
SU1002683A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОГО СИГНАЛА | 1970 |
|
SU275788A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| Электрогидравлический усилитель | 1980 |
|
SU950963A1 |
| Автоматизированный гидроимпульсный вертикальный вибропресс | 1991 |
|
SU1784395A1 |
| Электрогидравлический усилитель мощности | 1990 |
|
SU1712678A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
0
CusHOfl управ/ ения
. 1
