(S) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU382852A1 |
| Электрогидравлический усилитель мощности | 1981 |
|
SU1002683A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлический усилитель | 1982 |
|
SU1079912A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОГО СИГНАЛА | 1970 |
|
SU275788A1 |
| Электрогидравлический усилитель мощности | 1977 |
|
SU781405A1 |
| Электрогидравлический усилитель мощности | 1990 |
|
SU1721319A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Электрогидравлический усилитель | 1984 |
|
SU1158785A1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
- 1
Изобретение относится к гидравлическим устройствам автоматики, а именно к электрогидравлическим преобразователям.
По основному авт. св. № 382852 известен электрогидравлический преобразователь, предназначенный для улравления гидравлическими двухвходовыми исполнительными механизмами, содержащий электромеханический преобразователь и гидравлический усилитель мощности, выполненный в виде соединенных по мостовой схеме двух дифференциальных узлов типа сопло-заслонка, заслонки которых через узел кинематической связи соединены с поворотным якорем электромеханического преобразователя, узлы типа сопло-заслонка расположены в камерах, одна из которых соединена с каналом питания, другая - с каналом слива, узел кинематической ,связи выполнен в виде трубчатого торсиона, концы которого соединены с
корпусом, а средняя часть жестко связана с якорем, внутри торсиона размещен жестко соединенный с якррем валик, концы которого связаны с заслонками усилителя мощности.
Недостатки преобразователя - нелинейность характеристики электрогидравлического прео1бразователя, вызванная несовершенством упругих . свойств торсиона (наличие гистерезиtoса, последствие и другие эффекты), а также несовершенством крепления торсиона. Нелинейность, вызванная указанными- эффектами, особенно сильно
JJ проявляется при начальных отклонениях якоря от среднего положения, т.е. именно в момент перехода торсиона из свободного состояния в нагруженное Величина нелинейности при этом может
20 достигать 5-6.
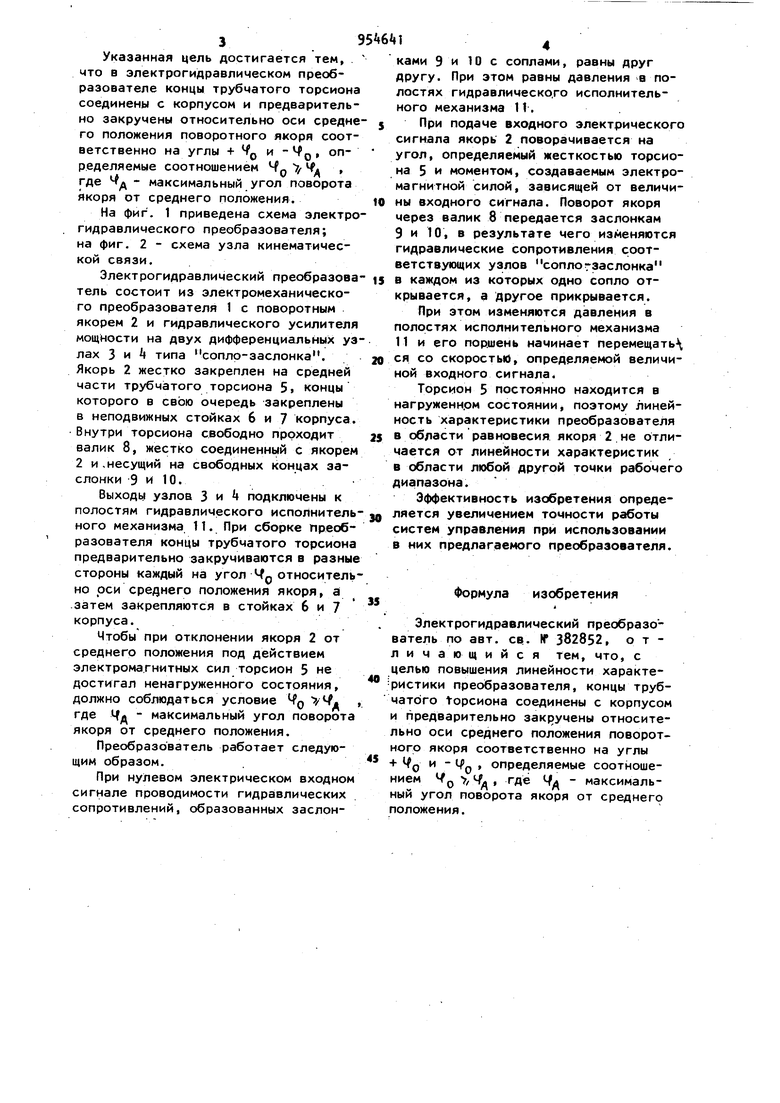
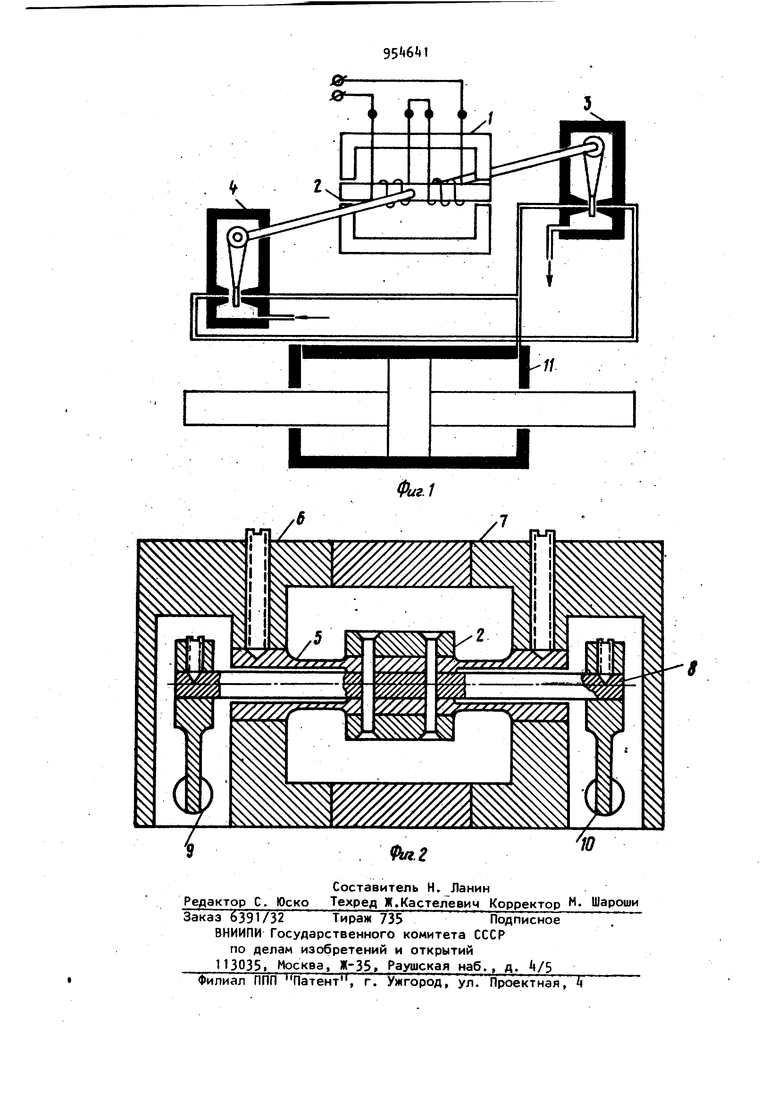
Цель изобретения - повышение линейности характеристики электрогид- равлического преобразователя. 39 Указанная цель достигается тем, что в электрогидравлическом преобразователе концы трубчатого торсиона соединены с корпусом и предварительно закручены относительно оси средне го положения поворотного якоря соответственно на углы + п и -4{ч, определяемые соотношением Ч,, f где - максимальный угол поворота якоря от среднего положения. На фиг. 1 приведена схема электро гидравлического преобразователя; на фиг. 2 - схема узла кинематической связи. Электрогидравлический преобразова тель состоит из электромеханического преобразователя 1 с поворотным якорем 2 и гидравлического усилителя мощности на двух дифференциальных уз лах 3 и типа сопло-заслонка. Якорь 2 жестко закреплен на средней части трубчатого торсиона St концы которого в свою очередь закреплены в неподвижных стойках 6 и 7 корпуса. Внутри торсиона свободно проходит валик 8, жестко соединенный с якорем 2 и.несущий на свободных концах заслонки 9 и 10. Выходы узлов 3 и подключены к полостям гидравлического исполнительного механизма 11. При сборке Преобразователя концы трубчатого торсиона предварительно закручиваются в разные стороны каждый на угол Ч относительно оси среднего положения якоря, а .затем закрепляются в стойках 6 и 7 корпуса. Чтобы при отклонении якоря 2 от среднего положения под действием электромагнитных сил торсион 5 не достигал ненагруженного состояния, должно соблюдаться условие % где Чд - максимальный угол поворота якоря от среднего положения. Преобразователь работает следующим образом. При нулевом электрическом входном сигнале проводимости гидравлических сопротивлений, образованных заслон1ками 9 и 10 с соплами, равны друг другу. При этом равны давления в полостях гидравлическо.го исполнительного механизма 11. При подаче входного электрического сигнала якорь 2 поворачивается на угол, определяемый жесткостью торсиона 5 и моментом, создаваемым электромагнитной силой, зависящей от величины входного сигнала. Поворот якоря через валик 8 передается заслонкам 9 и 10, в результате чего изменяются гидравлические сопротивления соответствующих узлов соплогзаслонка в каждом из которых одно сопло открывается, а другое прикрывается При этом изменяются давления в полостях исполнительного механизма 11 и его поршень начинает перемещать ся со скоростью, определяемой величиной входного сигнала. Торсион 5 постоянно находится в нагруженн.ом состоянии, поэтому линейность характеристики преобразователя в области равновесия якоря 2.не отличается от линейности характеристик в области любой другой точки рабочего диапазона. Эффективность изобретения определяется увеличением точности работы систем управления при использовании в них предлагаемого преобразователя. Формула изобретения Электрогидравлический преобразователь по авт. св. If 382852, отличающийся тем, что, с целью повышения линейности характеристики преобразователя, концы трубчатЬго Горсиона соединены с корпусом и предварительно закручены относительно оси среднего положения поворотного якоря соответственно на углы + If О и - г г , определяемые соотноше Q / Ч , где - максимальный угол поворота якоря от среднего положения.
