вибростолом, а поршневая полость соединена с генератором импульсов давления с элементами регулирования уровня давления и частоты следования импульсов, подвижную траверсу с инерционными пригрузами, цилиндр статического прижима, регулйтор инерционного пригруза, включающей манипулятор, накопитель и устройство управления, регуляторы амплитуды и частоты вибраций, содержащие электродвигатели, валы которых кинематически связаны с элементами регулирования уровня давления и частоты вибраций генератора импульсов давления, играющего роль вибровозбудителя, программируемый контроллер с пультом управления, аналого- цифровые преобразователи, операционные усилители, датчики линейных и угловых перемещений, усилители мощности, элементы коммутации перечисленных устройств, а также напорную и сливную гидролинии.
Недостатком данного вибропресс-мо- лота является очевидная сложность системы управления, которая, хотя и обеспечивает настройку и переналадку режимов вибронагружения, но требует большого количества электронных приборов и устройств, что ставит под сомнение степень надежности машины в целом, а тем более целесообразность использования ее в условиях серийного производства.
Кроме того, данный вибропресс рассчитан на постоянный входе прессования единичного изделия режим вибронагружения, обеспечиваемый системой управления, и не позволяет в ходе процесса вибропрессования варьировать частоту и амплитуду воздействия на заготовку.
Целью предлагаемого технического решения является расширение технологических возможностей вибропресса и упрощение перенастройки на требуемые режимы вибронагружения.
Это достигается тем, что в гидроимпульсном вибропрессе, содержащем рабочий цилиндр, шток которого жестко связан с вибростолом, подвижную траверсу с инерционными пригрузами, цилиндр статического прижима, гидроаккумулятор, напорную и сливную гидролинии и вибровозбудитель, последний выполнен в виде электрогидравлического усилителя (ЭГУ) с электромеханическим преобразователем, причем вход ЭГУ гидравлически связан с напорной гидролинией, а выходы соответственно с полостью рабочего цилиндра и со сливной гидролинией, а линия управления электрогидравлического усилителя гидравлически связана с напорной гидролинией цилиндра статического прижима, причем электромеханический преобразователь электрогидравлического усилителя соеди5 нен через усилитель мощности с задающим генератором частоты.
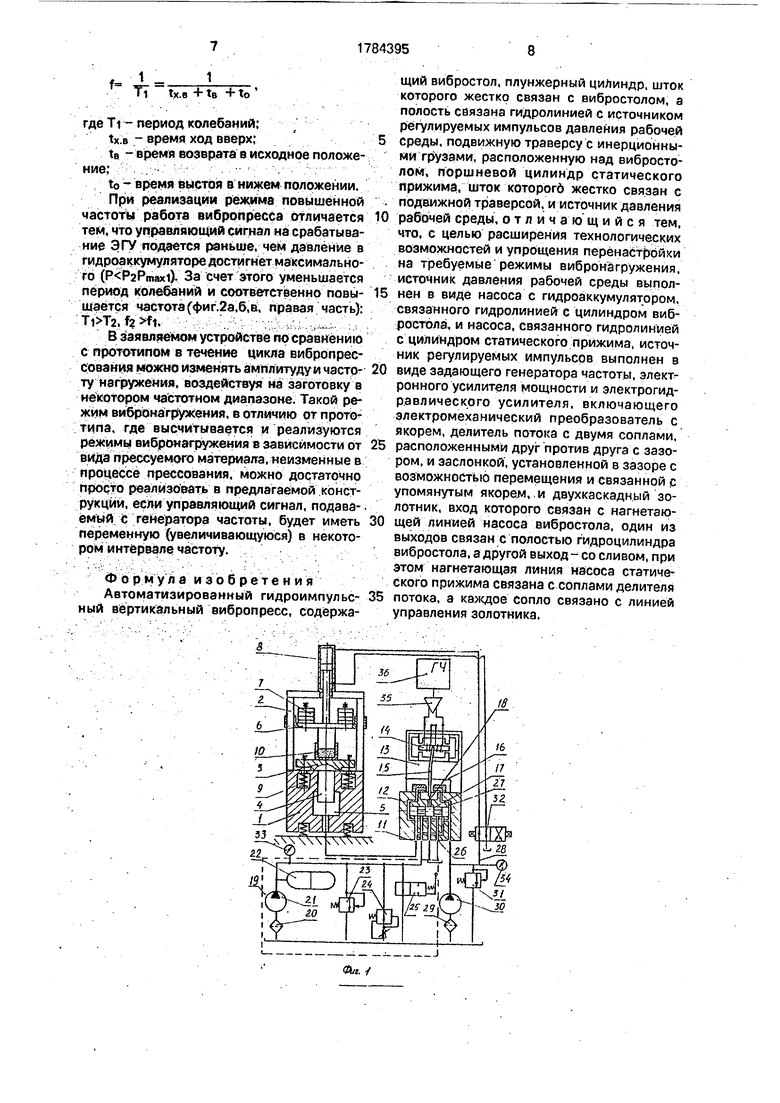
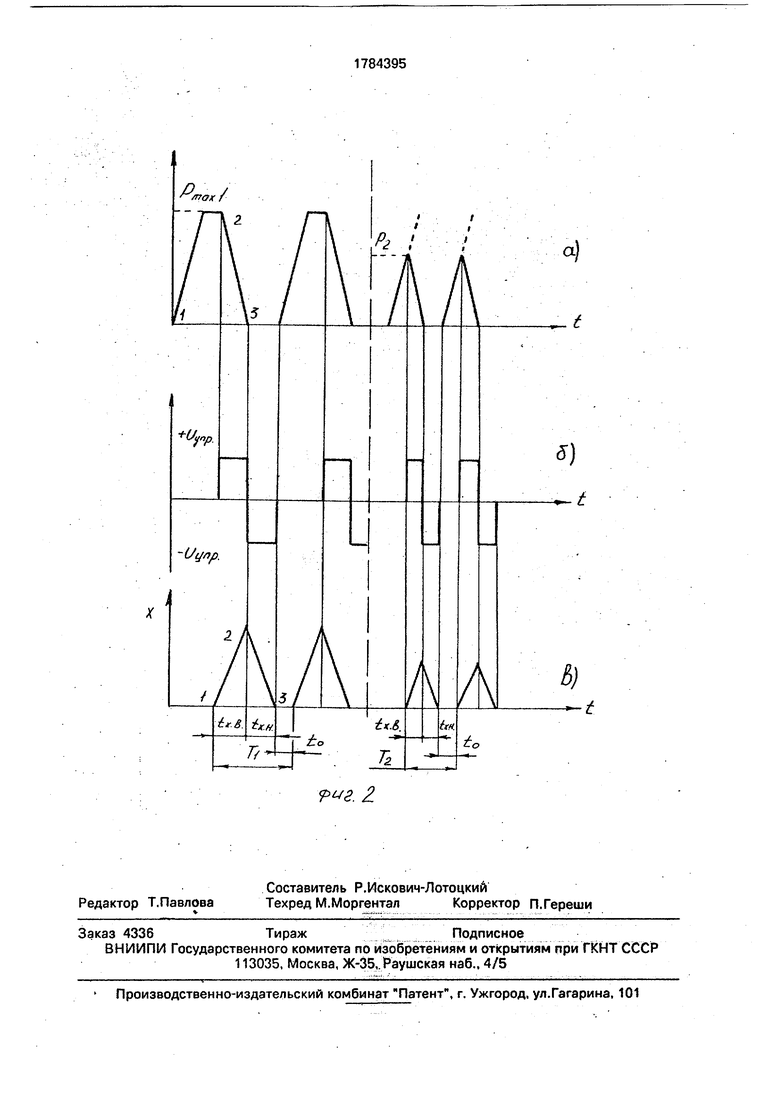
На фиг.1 показана электрогидравлическая схема вибропресса;- на фиг.2 - циклограммы работы вибропресса: 2а 0 циклограмма давления; 26 - управляющего сигнала; 2в - перемещения стола.
Инерционный вибропресс состоит из станины 1 с колоннами 2, вибростола 3, связанного с поршнем 4 рабочего цилиндра 5,
5 подвижной траверсы 6 с инерционными пригрузами 7 и цилиндром статического прижима 8, шток которого жестко связан с подвижной траверсой 6. В станине 1 установлены пружины возврата 9, соединенные
0 с вибростолом 3. На вибростоле 3 установлена матрица 10 с объектом обработки.
Поршневая полость рабочего гидроцилиндра 5 гидравлически связана с выходом 11 электрогидрзвлического усилителя 12. 8
5 состав ЭГУ входят электромеханический преобразователь 13, к якорю 14 которого присоединена заслонка 15 дифференциального управляющего элемента 16, а также золотник 17 и рычаг обратной связи 18.
0 Вход ЭГУ 12 гидравлически связан с напорной линией 13 насосной станции 19, в состав которой входят всасывающий фильтр 20, гидронасос 21, гидроаккумулятор 22, предохранительный клапан 23, регулятор
5 потока 24, гидрораспределитель 25. Выход ЭГУ соединен со сливной гидролинией 26, а линия управления 27 ЭГУ соединена с напорной гидролинией 28 цилиндра статического прижима 8, включающей
0 всасывающий фильтр 29, гидронасос 30, предохранительный клапан 31, гидрораспределитель 32. В напорных линиях гидросистемы вибропресса установлены манометры 33 и 34. Электромеханический
5 преобразователь 13 электрогидравлического усилителя 12 соединен с электронным усилителем мощности 35, который в свою очередь соединен с задающим генератором частоты 36.
0 Работает вибропресс следующим образом. При включении насосной станции цилиндра статического прижима гидронасос 30 нагнетает рабочую жидкость в напорную магистраль цилиндра статического прижи5 ма 8, гидрораспределитель 32 устанавливается в положение, при котором рабочая жидкость подается в поршневую полость цилиндра 8. Происходит перемещение штока цилиндра 8 и связанной с ним подвижной
траверсы 6 ьниз - создается необходимое
усилие статического прижима, регулируемое с помощью предохранительного клапана 31. Одновременно рабочая жидкость заполняет полость управления 27 ЭГУ12, на золотник 17 последнего действуют взаимно уравновешивающие силы, под действием которых он находится в среднем положении.
При включении насоса 21 он нагнетает рабочую жидкость в напорную линию, кото1 рая является в начальный момент разобщенной с рабочим цилиндром 5 посредством золотникового перекрытия электрогидравлического усилителя 12. Вследствие этого давление в гидроаккуму- ляторе 22 начинает возрастать. По достижении необходимой величины давления, контролируемой с помощью манометра 33, включается задающий генератор частоты 36, сигнал которого, усиливаясь усилите- лем мощности 35, поступает на вход электромеханического преобразователя 13 электрогидравлического усилителя 12. На обмотке преобразователя возникает управляющий магнитный поток. В результате вза- имодействия поляризующего магнитного потока, создаваемого постоянными магнитами электромеханического преобразователя 13, и управляющего 12 магнитного потока на якоре 14 последнего возникает момент, величина которого пропорциональна электрическому входному сигналу. Под действием этого момента якорь 14 электромеханического преобразователя 13 поворачивается, что вызывает смещение заслонки дифференциального управляющего элемента 16. Это вызывает разбаланс гидравлического моста ЭГУ 12, в результате,чего возникает перепад давлений в торцевых камерах золотниковой пары последнего, Зо- лотник 17 перемещается влево, открывая доступ рабочей жидкости из гидроаккумулятора 22 к полости исполнительного гидроцилиндра 5. Происходит перемещение
WW&
плунжера 4 с рабочим столом 3 вверх.
При снятии импульса управленй ГуТТ- равляющий магнитный поток на якоре 14 электромеханического преобразователя 13 станет равным нулю, золотник 17 электро- 50 гидравлического усилителя 12 под действием упругой силы со стороны рычага обратной связи 18 возвратится в исходное положение и перекроет доступ рабочей жидкости от гидроаккумулятора 22 к рабо- 55 чему цилиндру 5. Плунжер 4 с рабочим столом 3 прекращают перемещение вверх. При подаче управляющего сигнала противоположной полярности на обмотку электромеханического преобразователя 13
5 10 15 20 2530 3540
35
50 55
управляющий магнитный поток создает момент, вызывающий перемещение заслонки дифференциального управляющего элемента 16 в противоположную сторону. Разбаланс гидравлического моста ЭГУ 12 вызывает перепад давлений в торцевых камерах золотниковой пары. Золотник перемещается .теперь вправо, при этом рабочая жидкость из цилиндра 5, вытесняемая плунжером 4, приводимым в обратное движение пружинами упругого Возврата 9, через выход ЭГУ 12 поступает в сливную линию 26. Рабочий стол 3 с объектом обработки возвращается в исходное положение относительно станины 1.
Вибропресс с автоматизированной системой управления позволяет реализовать различные режимы вибропрессования, обеспечивая требуемую энергию, передаваемую импульсами давления, а также частоту колебаний Вариантность режимов вибро- нагружения обеспечивается частотой и длительностью импульсов сигнала управления, подаваемого на обмотку электромеханического преобразователя 13 ЭГУ 12 Для настройки вибропресса на требуемый режим достаточно измеййтТГ величину й длитель- ность импульсов управляющего сигнала, задаваемого генерат орбй частоты
Возможные режимы работы вибропресса с автоматизированном управлением иллюстрируют циклограммы, приведенные на фиг.2а, 26, 2в Режим максимально возможной энергии импульса (соответствующей максимальной величине давления зарядки гидроаккумулятора) изображен на левой части фиг.2. Режим, при котором частота увеличивается, а энергия импульса уменьшается по сравнению с режимом максимально возможной энергии импульса (режим пбвышенной частоты), изображен на правой части фиг 2. При реализации режима максимальной энергии, передаваемой им- пу тьсамй давлений рабочей жидкости, гид- роакку мулятор 22 заряжается до максимального возможного давтения Ртах 1, определяемого настройкой клэпана 23 (фиг.2). При подаче с задающего генератора частоты 36 управляющего импульса +Uynp (фиг.З) рабочая жидкость из гидроаккумулятора 22 поступает в рабочий цилиндр 5. что соответствует падению давления в гйТфоаккуМулйтЪре 22 - участок 2-3 (фиг 2а) и пёремещениГю рабочего стола вверх - участок 1-2 (фиг.2в). При подаче сигнала (-Uynp) (фиг 26) полость цилиндра 5 сообщается со сливной гидролинией 26, рабочий стол 3 перемещается вниз - участок 2-3 (фиг.2в). При этом частота колебаний рабочего стола определяется по формуле
f
1t
Т tx.e + te + to
где Ti - период колебаний;
tx.e - время ход вверх;
tB - время возврата в исходное положение;
to - время выстоя в нижем положении.
При реализации режима повышенной частоты работа вибропресса отличается тем, что управляющий сигнал на срабатывание ЭГУ подается раньше, чем давление в гидроаккумуляторе достигнет максимального (P P2Pmaxi). За счет этого уменьшается период колебаний и соответственно повы- шается частота (фиг.2а,б, в, правая часть): ,.
В заявляемом устройстве по сравнению с прототипом в течение цикла вибропрее- сования можно изменять амплитудуи часто- ту нагружения, воздействуя на заготовку в некотором частотном диапазоне. Такой режим вибронагружения, в отличию от прототипа, где высчитывается и реализуются режимы вибронагружения в зависимости от вида прессуемого материала, неизменные в процессе прессования, можно достаточно просто реализовать в предлагаемой конструкции, если управляющий сигнал, подаваемый с генератора частоты, будет иметь переменную (увеличивающуюся) в некотором интервале частоту.
Формула изобретения Автоматизированный гидроимпульс- ный вертикальный вибропресс, содержащий вибростол, плунжерный цилиндр, шток которого жестко связан с вибростолом, а полость связана гидролинией с источником регулируемых импульсов давления рабочей среды, подвижную траверсу с инерционными грузами, расположенную над вибростолом, поршневой цилиндр статического прижима, шток которогб жестко связан с подвижной траверсой, и источник давления рабочей среды, отличающийся тем, что, с целью расширения технологических возможностей и упрощения перенастройки на требуемые режимы вибронагружения. источник давления рабочей среды выполнен в виде насоса с гидроаккумулятором, связанного гидролинией с цилиндром вибростола, и насоса, связанного гидролинией с цилиндром статического прижима, источник регулируемых импульсов выполнен в виде задающего генератора частоты, электронного усилителя мощности и электрогидравлического усилителя, включающего электромеханический преобразователь с якорем, делитель потока с двумя соплами, расположенными друг против друга с зазором, и заслонкой, установленной в зазоре с возможностью перемещения и связанной с упомянутым якорем, и двухкаскадный золотник, вход которого связан с нагнетающей линией насоса вибростола, один из выходов связан с полостью гидроцилиндра вибростола, а другой выход- со сливом, при этом нагнетающая линия насоса статического прижима связана с соплами делителя потока, а каждое сопло связано с линией управления золотника.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система программного управления инерционным вибропресс-молотом | 1989 |
|
SU1687351A1 |
| СИСТЕМА УПРАВЛЕНИЯ СЛЕДЯЩИМ ПРИВОДОМ ВИБРАЦИОННОГО ПРЕССА | 1995 |
|
RU2095249C1 |
| Система программного управления инерционным вибропресс-молотом | 1986 |
|
SU1366271A1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2007 |
|
RU2361119C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |
| Гидроимпульсный привод вибропресса | 1989 |
|
SU1697969A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| Трехкоординатный гидроимпульсный вибропресс | 1988 |
|
SU1581843A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2007 |
|
RU2346187C2 |
&
