1
Известны устройства для автоматического управления процессом гидротранспортирования, включающее датчики давления установленные на грунтопроводе, суммирующий элемент, датчик вакуума, датчик расхода пульпы, датчик токовой нагрузки двигателя становой лебедки, усилитель, элементы логического действия и исполнительный механизм.
В предлагаемом устройстве с целью иовыщения производительности путем сравнения отклонений реальной эпюры потерь напора от осреднеииой идеальной эпюры к суммирующему элементу подключен аналоговый вычислительный блок, вход которого соединен с датчиками давления, устаиовлениыми на грунтопроводе по его длиие.
На фиг. 1 изображена структурная схема устройства на фиг. 2-принципиальная схема устройства; на фиг. 3-приближенные эиюры распределения потерь напора при работе рефулерной установки на воде и на грунте (для случая, когда напорный грунтопровод находится на одном уровне).
Устройство включает (см. фиг. 1) задатчик /, сумматор 2, усилитель 3, имиульсный элемент 4, исполнительный механизм 5, объект 6 управления, датчик 7 модуля максимального отклонения реальной эпюры потерь
напора I АмаксЬ датчик 8 вакуума, датчик У тяги, датчик 10 расхода.
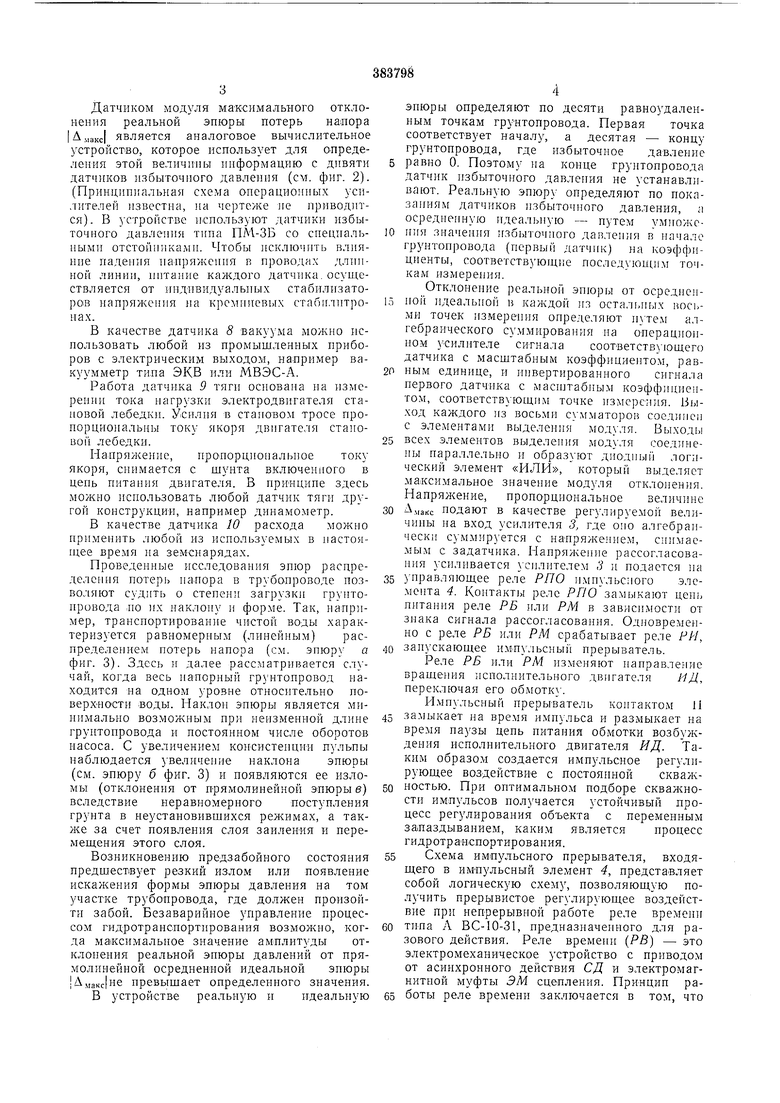
Задатчик 1 состоит (см. . 2) из потенциометра 1 и стабилизатора наиряжеНИН DI; RZСумматор 2 соединен со входом усилителя 3, в качестве которого используют усилитель постоянного тока от промыщлеиного регулятора типа РПИБ-111 (принципиальная
схема усилителя ие приводится).
Импульсный элемент 4 включает в себя чувствительное реле РПО, подключенное к выходу усилителя 3, исполиительные реле РБ и РМ, импульсный прерыватель, собранный на управляющих реле РИ, PI, Р и реле времени РВ типа ВС-10-31, ограничитель, собранный на реле РПР, РПВ, РПУ, подключенных соответственно к датчикам расхода, вакуума, тяги и исполнительное рсле РП.
В качестве исполнительного механизма Ь использован двухфазный асинхронный двигатель ЯД типа РД-09 с редукторной передачей Р, преобразующей вращательное движение в поступательное движение движка реостата унравления скоростью вращения двигателя становой лебедки РУ.
Объект 6 управления представляет собой земснаряд с насосной установкой и грунтопроводом.
3
Датчиком модуля максимального отклонения реальной эпюры потерь напора Амакс является аналоговое вычислительное устройство, которое использует для определения этой величины информацию с дивяти датчиков избыточного давления (см. фиг. 2). (Принципиальная схема оиерациониых усилителей известна, на чертеже ие приводится). В зстройстве ИСнользуют датчики избыточного давления тина ПЛ1-ЗБ со сиецнальными отстойника.ми. Чтобы исключить влияние падения напряжения в проводах длинной линии, питание каждого датчика, осуигествляется от индивидуальных стабнлнзатоpOiB наиряжеиия на кремниевых стаГмглитронах.
В качестве датчика 8 вакуума можно нснользовать любой нз промышленных приборов с электрическим выходом, например вакуумметр типа ЭКВ или МВЭС-А.
Работа датчика 9 тяги основана на измерении тока нагрузки электродвигателя становой лебедки. Усилия в становом тросе пропорцио 1альны току якоря двигателя становой лебедки.
Напряжение, нропорциональиое току якоря, снимается с шунта включенного в цепь нитання двигателя. В принципе здесь можно исиользовать любой датчик тяги другой конструкции, например динамометр.
В качестве датчика 10 расхода можно прнмепить любой из иснользуемых в настоящее время на земснарядах.
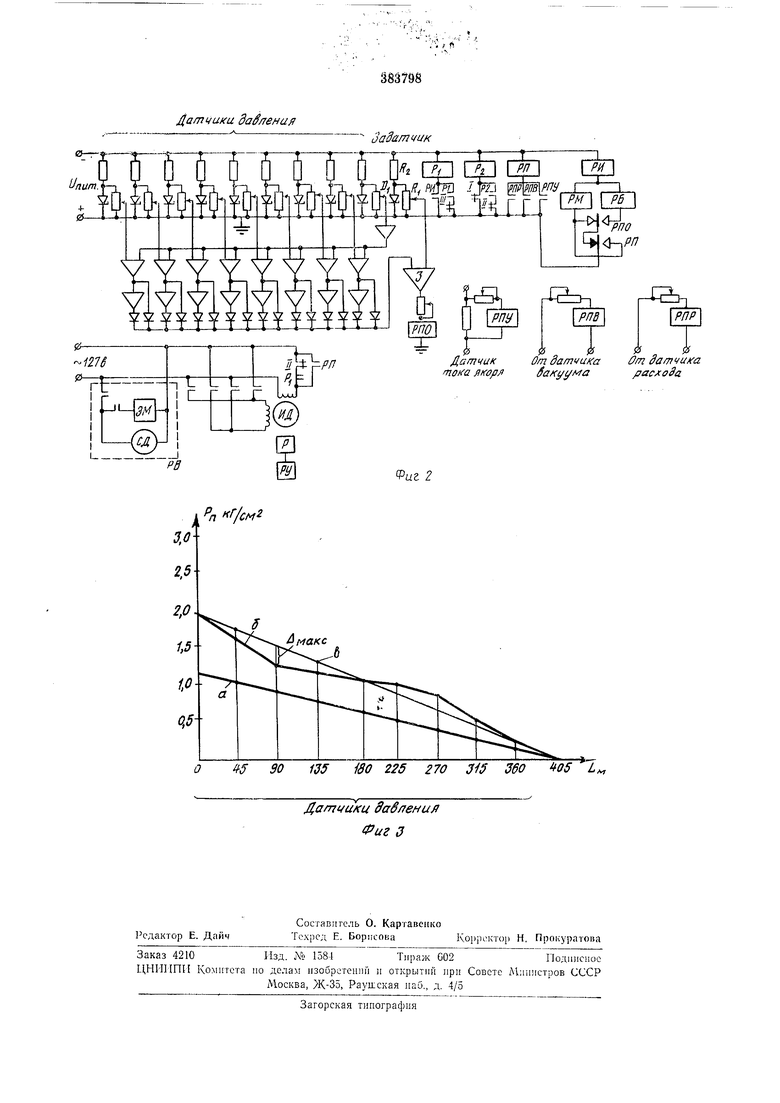
Проведенные нсследовання эпюр распределения потерь нанора в трубопроводе позволяют судить о степени загрузки грунтонровода но их наклону и форме. Так, например, транснортирование чистой воды характеризуется равномерным (линейным) расиределением потерь напора (см. эпюру а фиг. 3). Здесь и далее рассматривается случай, когда весь иапорный грунтопровод находится на одном уровне относительно поверхности воды. Паклои эпюры является минимально возможным при неизменной длине грунтопровода и постоянном числе оборотов насоса. С увеличением консистенции нульпы наблюдается увеличение наклона эпюры (см. эпюру б фиг. 3) и появляются ее изломы (отклонения от прямолинейной эпюры в) вследствие неравномерного поступления грунта в пеустановивгпихся режимах, а также за счет появления слоя занлеш-ш и перемеш.ения этого слоя.
Возникновению предзабойного состояния предшествует резкий излом нли появление искажения формы эпюры давления на том участке трубопровода, где должен произойти забой. Безаварийное управление процессом гидротрапспортирования возможно, когда максимальное значение амплитуды отклонення реальной эпюры давлений от прямолинейной осредненной идеальной эпюры jAjiaKcHe превышает определенного значения.
В устройстве реальную н ндеальную
4
эпюры определяют по десяти равноудаленным точкам грунтопровода. Первая точка соответствует началу, а десятая - концу грунтопровода, где избыточное давление равно 0. Поэтому иа конце грунтопровода датчик избыточного давления не устанавливают. Реальную эпюру определяют по показаниям датчиков избыточного давления, а осредненную идеальную - путем умпожсния значення избыточного давления в начале грунтопровода (первый датчик) на коэффициенты, соответствующие последующим точкам из.мер ей ия.
Отклонение реальной эпюры от осредненной идеальной в каждой из остальных восьми точек измерения определяют алгебраического су.ммирования на онерациопном УСилптеле сигнала соответствующего датчика с масштабным коэффнциентом, равным единице, и инвертированного сигнала первого датчика с маси табиь м коэффиииентом, соответств ющим точке измерения. Выход каждого из восьми сумматоров соединен с элементами выделения модуля. ВЕ ЬХОДЫ
всех элементов выделения модуля соединены параллельно и образуют диодиый логический элемент «ИЛИ, который выделяет максимальное значение модуля отклоиения. Напряжение, пропорциональное величине
AjiaKc подают в качестве регулируемой величины на вход усилителя 3, где оно алгебраически суммируется с нанряжением, CHJtMaeмым с задатчика. Напряжение рассогласоваиия усиливается усилителем 3 и подается иа
управляющее реле РПО имп льс11ого элемента 4. Коитакты реле РПО замыкают цеи1 нитання реле РБ или РМ в зависимости от знака сигнала рассогласования. Одновременно с реле РБ или РМ срабатывает реле РИ,
запускающее импульсный прерыватель.
Реле РБ или РМ нзменяют направление вращения исполнительного двигателя ИД, переключая его обмотк}.
Р1мп льсный прерыватель контактом И
замыкает на время и. и размыкает на время паузы цепь питания обмотки возбуждения исполнительного двигателя ИД. Таким образом создается импульсное регулирующее воздействрге с постоянной скважностью. При оптимальном подборе скважности импульсов нолучается устойчивый процеес регулирования объекта с переменным запаздыванием, каким является нроцесс гидротранспортирования.
Схема импульсного прерывателя, входящего в импульсный элемент 4, представляет собой логическую схему, позволяющую получить прерывистое регулирующее воздействие при непрерывной работе реле времени
типа Л ВС-10-31, предназначенного для разового действия. Реле времени (РВ) - это электромеханическое устройство с приводом от асинхронного действия СД и электромагнитной муфты ЭМ сцепления. Принцип работы реле времени заключается в том, что
вращение от двигателя СД передается через муфту сцепления ЭМ трем дискам, которые приводят в действие три блока -входных контактов I, II, III через определенные, заранее установленные промежутки времени. Включепное в схему устройства реле времени работает следующим образом.
В исходном состоянии сигнал рассогласования равен О и реле РПО, РИ и Р обесточены.
Реле РП ограничителя также обесточены. Цепь питания двигателя СД и электромагнита ЭМ разомкнута. Цепь питания об.мотки возбуждения двигателя //Д разомкнута, т. к. разомкиуты контакты Р и РП.
Контакты 1, И, III реле времени находятся в исходном состоянии, т. е. замкнуты. Реле PZ находится под током, так как замкнут контакт I.
При появлении усиленного сигнала рассогласования срабатывают реле РПО, РМ или РБ, РИ, Р|. Контакты реле Р замыкают цепь питания двигателя СД и электромагнита ЭМ и цепь питаиия возбуждения двигателя ИД. Исполнительный двигатель иачннает вращаться. Одновременно приводится в действие реле времеии, так как контакт Р замкнут и подает питание на ЭМ. Выдержка времени контакта II равна иродолжительности импульса. Таким образом двигатель ИД вращается только тогда, когда замкнут контакт П. По истечении же времени выдержки, равного периоду следования шшульсоз, размыкается коитакт III и реле PZ снимается с самоблокировки (выдержка времеии коитакта I зиачителыю меньше выдер/кки времени контакта III).
Контакт PZ размыкается и снимает питание с электромагнита ЭМ. При этом диски реле времени возвращаются в исходное соетояиие под действием пружииы и контакты I, II, III замыкаются. Если при этом контакт РИ остается замкнутым, т. е. имеется сигиал рассогласования, то реле PI, остается под током, а реле PZ срабатывает как только замкнется контакт I, при этом срабатывает электромагнит муфты сцепления и реле времени вновь приводится в действие. Периодический процесс работы реле времени продолжается до тех пор, пока реле PI пе будет обесточено.
Выше была рассмотрена работа устройства при отпугценном реле РП ограничителя. Ограничитель предназначен для защиты процесса от аварийных оггуаций. Поэтому при уменьшении расхода пульпы ниже минимального донустимого значения или же при возрастаиии усил1 я в тросе и вакууме вьине предельных допустимых зиачеиий этих величии срабатывают реле РПР, РПУ, РПВ соответствеиио. Контакты этих реле включены параллельно в цепь питаиия реле РП. При срабатывании реле РП замыкается контакт РП и подает питанне на обмотку возбуждения двигателя //Д. Одновременно срабатывает реле РМ, обеспечивающее вращение двигателя //Д в стороиу умепьшения регул ируюи1,его воздействия.
Предмет и з о б р е т е н н я
Устройство для автоматического управления процессом гидротраиспортирования, включающее датчики давления, установленные на грунтопроводе, суммирующий элемеит, датчик вакуума, датчик расхода пульны, датчик токовой нагрузки двигателя становой лебедки, усилитель, логического действия и исиолнительиый механизм, от.н1чаюи{ееся тем, что, с целью иовышения нроизводительностн нутем сравнения отклонений реальиой энюры потерь напора от осреднеиной идеальной эиюры, к суммирующему элементу иодключеи аналоговый вычислительиый блок, вход которого соединен с датчиками давления, установленнымн на грунтопроводе по его длние.
Датчики да /геная
Задатчик Датчик оТп датчш(а то/са xopfl SaKi/i/ма Д&, От da/n i f a. flacj(o3a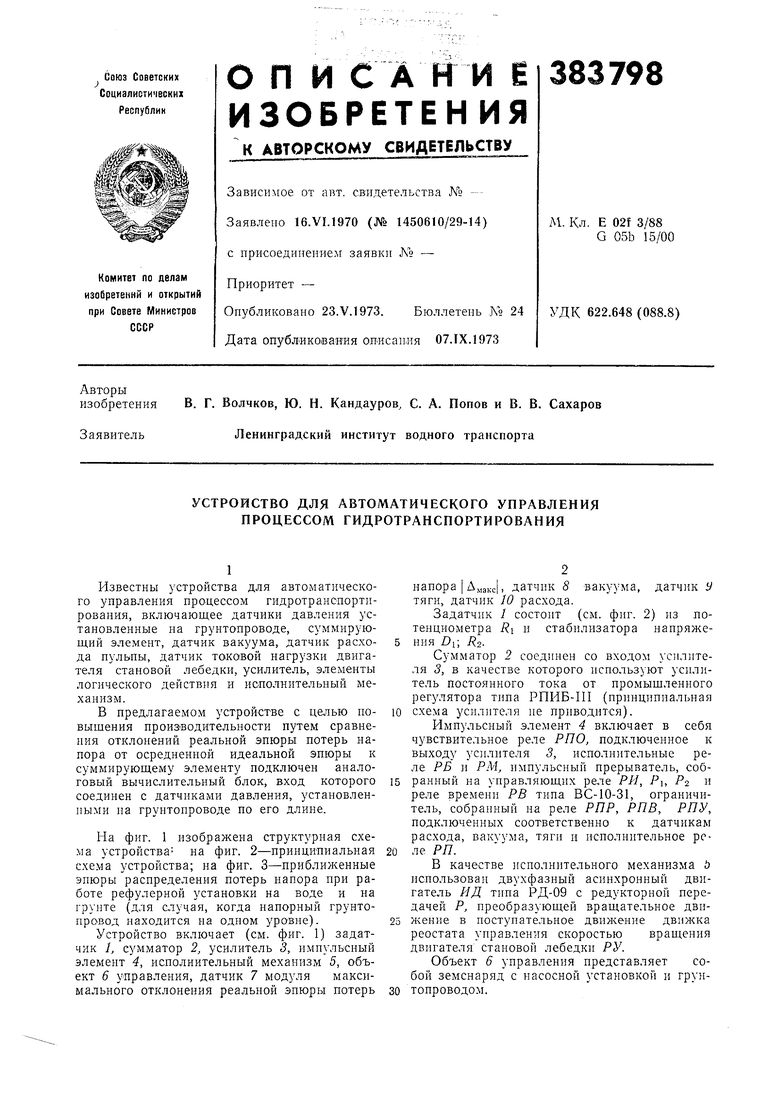

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ И РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ | 1969 |
|
SU235191A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| Временное релейное устройство | 1947 |
|
SU83444A1 |
| РЕГУЛЯТОР ОБОРОТОВ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГОСГОРАНИЯ | 1971 |
|
SU305272A1 |
| ГРУППОВАЯ УСТАПОВКА ДЛЯ СБОРА, ЗАМЕРА И ТРАНСПОРТА НЕФТИ И ГАЗА | 1968 |
|
SU213732A1 |
| РЕГУЛЯТОР ЦИКЛИЧНО РАБОТАЮЩЕГО АГРЕГАТА | 1971 |
|
SU317040A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРОВНЯ И ТЕМПЕРАТУРЫ ВОДБ1 В РИСОВЫХ ЧЕКАХ | 1973 |
|
SU408985A1 |
| Устройство для автоматического управления рабочим процессом сварочных машин по четырехпозиционному циклу | 1952 |
|
SU94264A1 |
| ТЕХНИЧРСГ.-: БИБТЙОТ; ••II | 1964 |
|
SU165238A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568527C1 |
I.Irrl - РВ
РП кГ/см2
О 5 90 135 Ш 225 270 3i5 360 05 L,
4smt/u/(u
Фиг 2 ffuz 3
