Изобретение относится к гидромеханизации земляных работ, а именно к устройствам управления земснарядами. Устройство предназначено для автоматического управления технологическим процессом грунтозабора и гидротранспортирования пульпы, осуществляемым с помощью судового энергетического комплекса речных землесосов при выполнении дноуглубительных работ на речных и морских фарватерах.
Известно устройство управления работой земснарядов по а.с. СССР N 14-51223, МПК E02F 3/90, 1986, содержащее: датчик токовой нагрузки, расходомер, сумматор, блок ограничений, датчик скорости поворота земснаряда и командный блок.
Недостатком известного устройства является невозможность обеспечения плавной работы земснарядов в реальных технологических условиях.
Известно также устройство по а.с. СССР N 755962, МПК E02F 3/90, 1978, содержащее: датчики токовой нагрузки, формирователи сигнала, задатчики зоны нечувствительности, блок задержки, инвертор, задатчики отсечки, блок выделения преобладающего сигнала.
Недостатком известного устройства является недостаточная надежность его работы в критических режимах.
Наиболее близким аналогом предлагаемого устройства по технической сущности и назначению является устройство для управления работой земснаряда по а.с. №1808921, МПК E02F 3/88, 1991. Указанное устройство содержит: датчик давления и датчик вакуума, установленные соответственно на грунтопроводе и на всасывающей части рефулера, датчик расхода пульпы, датчик скорости выбирания станового троса, датчик токовой нагрузки электродвигателя становой и папиленажных лебедок, сумматор и усилитель, подключенные к исполнительному механизму.
Недостатком устройства, принятого за прототип, является недостаточная производительность земснаряда, вызванная его плохой приспособленностью к реальным условиям, в том числе, к возможностям засорения земснаряда, ухудшения качества грунта и т.д.
Заявляемое устройство позволяет получить новый по сравнению с прототипом технический результат, заключающийся в повышении производительности земснаряда за счет обеспечения адаптации его к реальным условиям.
Для достижения указанного технического результата используется следующая совокупность существенных признаков: устройство для управления работой земснаряда (содержащее, так же как и прототип, соединенные соответственно между собой задатчик режима и сумматор, усилитель и исполнительный механизм, при этом выход последнего подключен к земснаряду, выходы которого в свою очередь соединены с датчиком давления, датчиком вакуума, датчиком расхода пульпы, датчиком усилия на становом тросе), в отличие от прототипа дополнительно снабжено блоком адаптации, блоком измерения мощности дизеля земснаряда и блоком определения засорения земснаряда, при этом выходы последних двух блоков подключены к входам блока адаптации, в свою очередь к остальным входам блока адаптации подсоединены выходы исполнительного механизма и датчика давления, датчика вакуума, датчика расхода пульпы и датчика усилия на становом тросе, а также сумматора.
Сопоставление предлагаемого устройства и прототипа показало, что поставленная задача - повышение производительности земснаряда за счет обеспечения адаптации его к реальным условиям, решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
Вместе с тем проведенный информационный поиск в области гидромеханизации земляных работ не выявил решений, содержащих отдельные отличительные признаки устройства, что позволяет сделать вывод о соответствии заявляемого объекта критерию «изобретательский уровень».
Сущность предлагаемого изобретения поясняется чертежами, где:
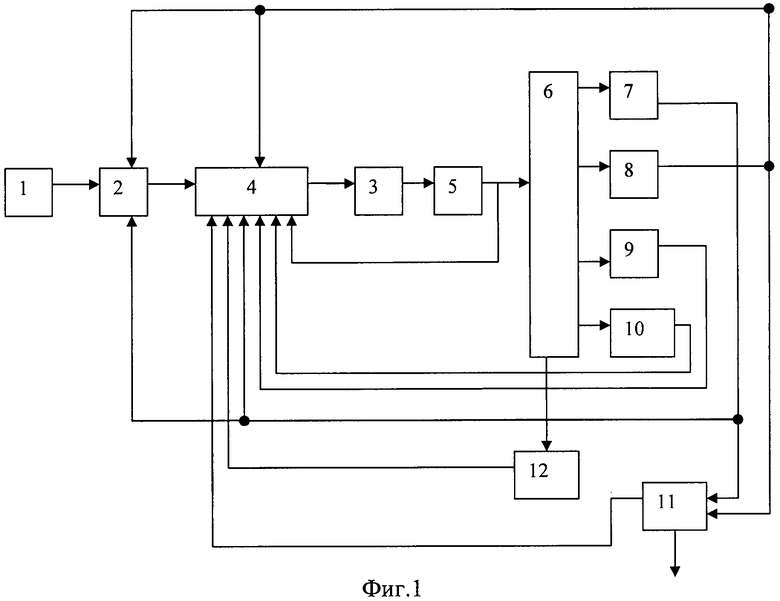
на фиг.1 - изображена схема устройства для управления работой земснаряда;
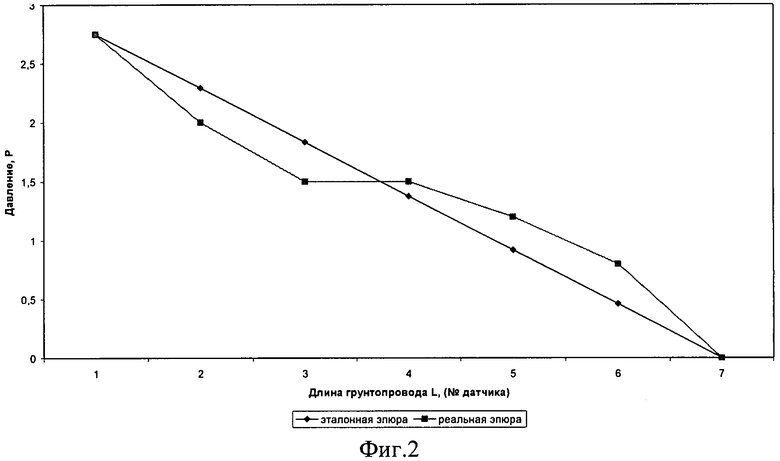
на фиг.2 - эпюра распределения потерь давления (напора) по длине рефулера при транспортировании пульпы.
В состав устройства (фиг.1) входят: задатчик режима 1, сумматор 2, усилитель 3, блок адаптации 4, исполнительный механизм 5, объект управления 6 (земснаряд), датчик давления 7, установленный на напорной части грунтопровода, датчик вакуума 8, датчик усилия на становом тросе 9, датчик расхода пульпы 10, блок определения засорения земснаряда 11, блок измерения мощности дизеля земснаряда (грунтового насоса) 12.
Задатчик 1 соединен с сумматором 2, на входы которого подаются сигналы датчиков вакуума 8 и давления 7. Сумматор 2 соединен с входом блока адаптации 4. Кроме того, на блок 4 поступают сигналы с датчиков 8, 9, 10, а также с блоков 11 и 12. Для обеспечения устойчивости работы устройства на вход блока 4 подается сигнал с выхода исполнительного механизма 5. Исполнительным механизмом 5 является штатный электропривод становой лебедки, на вход которого подается напряжение с усилителя (тиристорного управляемого выпрямителя) 3.
Объектом управления 6 является земснаряд с насосной установкой и грунтопроводом. Центробежный грунтовый насос вращается с помощью дизеля, частота вращения которого поддерживается постоянной с помощью астатического регулятора скорости. Грунтопровод состоит из подвижной всасывающей части (сосуна) и напорной части.
Сумматор 2, блоки 4, 11 и 12 реализованы на бортовом компьютере в кодах MatLAB, что позволяет обеспечить устройству высокую точность идентификации технологических режимов. Сумматор 2 предназначен для суммирования показаний с датчиков вакуума и давления в пропорции, соответствующей заданному режиму, и сравнения этой суммы с сигналом с задатчика 1. Произведение показаний с датчиков вакуума и давления на скорость показаний с датчика расхода пульпы в грунтопроводе пропорционально полезной мощности, потребляемой грунтопроводом. Мощность двигателя рефулерного насоса (дизеля) измеряется блоком 12. При постоянной частоте вращения вала дизеля на всех нагрузках мощность оценивается по ходу рейки топливного насоса дизеля.
Блок 11 предназначен для определения состояния засорения земснаряда в результате попадания остатков древесины, различных видов растительности, камней и других предметов, находящихся на дне реки и периодически накапливающихся на решетке наконечника сосуна. Момент засорения определяется по увеличению вакуума до граничных значений при снижении расхода.
Блок адаптации 4 выполняет следующие функции:
- определение эпюры потерь напора по длине трубопровода по показаниям датчиков давления, распределенных по трубопроводу (фиг.2, реальная характеристика);
- оценку положения эпюры потерь напора при равномерном поступлении грунта в грунтопровод (фиг.2, эталонная характеристика);
- определение среднеквадратичной ошибки отклонения эпюры в динамике от эталона;
- автоматический выход энергетической установки земснаряда на энергосберегающий режим при максимальной производительности по грунту;
- обеспечение равномерного движения земснаряда по прорези при разработке переката;
- выполнение функций защиты от перехода технологического режима в предзабойное состояние, приводящее к закупорке грунтопровода;
- ограничение натяжения станового троса;
- остановку земснаряда при засорении сосуна для очистки.
Проведенные исследования эпюр распределения потерь напора в грунтопроводе земснаряда показали, что эпюры содержат информацию об эффективности и качестве реализации технологического процесса в конкретной внешней среде. Прохождение по грунтопроводу чистой воды характеризуется малыми колебаниями вакуума и наибольшим наклоном эпюры падения напора по длине грунтопровода. При поступлении грунта в грунтопровод возникает переходный режим. Он характеризуется возрастанием вакуума и по мере поступления грунта в грунтопровод - повышением напора в грунтопроводе. Напорная часть рефулера, длина которой достигает 250-400 м, обладает высокими инерционными свойствами, а постоянная времени всасывающей части на один - два порядка меньше. По мере приближения к стационарному процессу гидротранспортирования пульпы производительность земснаряда увеличивается, сопротивление движению многокомпонентной смеси по грунтопроводу возрастает, а скорость пульпы уменьшается. Одновременно уменьшается мощность дизеля, что также приводит к уменьшению хода рейки топливных насосов. Наиболее экономичному режиму соответствует стационарный устойчивый режим транспортирования, при котором максимальной производительности по грунту соответствует наименьшая мощность дизеля и сохраняется устойчивость технологического процесса.
Режим максимальной производительности обеспечивается путем поддержания наивысшей консистенции пульпы. Дальнейшее повышение консистенции приводит к потере транспортирующей способности землесосной установки вплоть до закупорки трубопровода гидротранспортной системы. Признаками приближения к этому состоянию служат колебания давления, возникающие в трубопроводе, приводящие к диссипативным процессам и потере транспортирующей способности пульпы, что наблюдается по эпюре потерь напора в системе. Технологический процесс становится неустойчивым.
Степень приближения рабочего режима к наиболее эффективному по энергосбережению зависит от того, насколько близок этот режим при сохранении устойчивости к самой границе устойчивости. При неравномерном поступлении грунта в грунтопровод, вызванном изменением скорости выбирания станового троса и организацией грунтозабора (заглубление сосуна, с учетом свойств извлекаемого грунта, технология разрыхления и др.), консистенция пульпы на отдельных участках грунтопровода будет различной, что приводит к отклонениям формы эпюры потерь напора (фиг.2, реальная эпюра) от прямолинейной (фиг.2, эталонная эпюра). Форма эпюры изменяется во времени по мере прохождения пульпы с неравномерной консистенцией по грунтопроводу. В тех случаях, когда грунт поступает в грунтопровод неравномерно, предзабойный режим наступает при больших значениях мощности.
Чтобы улучшить процесс управления, требуется обеспечить равномерное всасывание грунта, что достигается путем регулирование скорости выбирания станового троса с учетом среднего квадрата ошибки, возникающей вследствие отклонения реальной эпюры потерь напора от эталонной. Вычисление среднеквадратичной ошибки по результатам измерения производится в блоке 4.
Заявляемое устройство работает следующим образом.
Устанавливаются граничные значения мощности дизеля и усилия на становом тросе, определяются границы засорения сосуна. По готовности землеснаряда к работе (при номинальной частоте вращения вала двигателя и рефулерного насоса, требуемом заглублении сосуна, расположении землесоса на прорези и его удержании с помощью папиленажных лебедок, закреплении концевого понтона) при действующих датчиках информации устройство включается.
Под действием сигнала, поступающего с датчика 2 на блок адаптации 4, формируется сигнал, открывающий тиристоры, в результате чего происходит пуск электродвигателя становой лебедки и устанавливается заданная скорость выбирания станового троса. Во всасывающую часть грунтопровода увеличивается поступление грунта за счет вакуума. С выходом системы грунтозабора и гидротранспортирования пульпы на стационарный режим устанавливаются рабочие параметры, обеспечивающие эффективное энергосбережение при максимально возможной (по условиям устойчивости процесса) производительности земснаряда. В процессе работы устройства с помощью блока 4 по среднеквадратичной ошибке производится коррекция скорости выбирания станового троса до значений, при которых обеспечивается равномерное поступление грунта в грунтопровод.
В случаях неравномерного поступления грунта происходит увеличение вакуума, и под действием разности сигналов с задатчика 1 и сигналов обратной связи, поступающих с датчиков 7 и 8, скорость выбирания троса уменьшается вплоть до остановки, и технологический режим восстанавливается.
С увеличением вакуума и снижением производительности земснаряда срабатывает датчик засорения земснаряда, и земснаряд останавливается для выполнения профилактической работы по существующим технологиям.
По заданию ФГУ «Севводпуть» предлагаемое устройство было апробировано при выполнении землечерпательных работ на землесосном снаряде «Северо-Двинский-714». Испытания показали положительный результат, что позволило сделать вывод о соответствии объекта критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ГИДРОТРАНСПОРТИРОВАНИЯ | 1973 |
|
SU383798A1 |
| Устройство для автоматического управления процессом гидротранспортирования | 1978 |
|
SU785428A1 |
| Устройство для автоматического управления землесосным снарядом | 1985 |
|
SU1382918A1 |
| Устройство автоматизированного управления земснарядом | 1987 |
|
SU1497358A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗЕМЛЕСОСНОГО СНАРЯДА | 1969 |
|
SU250750A1 |
| Устройство управления процессом грунтозабора землесосного снаряда | 1989 |
|
SU1705494A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| Многососунный землесос | 1948 |
|
SU79033A1 |
| Землесос | 1937 |
|
SU53434A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
Изобретение относится к гидромеханизации земляных работ, а именно к устройствам управления земснарядами. Технический результат - повышение производительности. Устройство для управления работой земснаряда содержит соединенные между собой задатчик режима, сумматор, усилитель, исполнительный механизм, подключенный к земснаряду, выходы которого соединены с датчиком давления, датчиком вакуума, датчиком расхода пульпы, датчиком усилия на становом тросе. Устройство дополнительно снабжено блоком адаптации, блоком измерения мощности дизеля земснаряда и блоком определения засорения земснаряда. При этом выходы последних двух блоков подключены к входам блока адаптации, в свою очередь к остальным входам блока адаптации подсоединены выходы исполнительного механизма и датчиков давления, вакуума, расхода пульпы и усилия на становом тросе, а также сумматора. 2 ил.
Устройство для управления работой земснаряда, содержащее соединенные соответственно между собой задатчик режима и сумматор, усилитель и исполнительный механизм, при этом выход последнего подключен к земснаряду, выходы которого, в свою очередь, соединены с датчиком давления, датчиком вакуума, датчиком расхода пульпы и датчиком усилия на становом тросе, отличающееся тем, что дополнительно снабжено блоком адаптации, блоком измерения мощности дизеля земснаряда и блоком определения засорения земснаряда, при этом выходы последних двух блоков подключены к входам блока адаптации, к остальным входам которого подсоединены выходы исполнительного механизма, датчика давления, датчика вакуума, датчика расхода пульпы и датчика усилия на становом тросе, а также сумматора.
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 0 |
|
SU199007A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 0 |
|
SU250748A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВУЧИМ ЗЕМЛЕСОСНЫМСНАРЯДОМ | 0 |
|
SU340746A1 |
| Устройство для автоматического управления процессом гидротранспортирования | 1978 |
|
SU785428A1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| Устройство управления процессом грунтозабора землесосного снаряда | 1987 |
|
SU1465503A1 |
| Устройство управления процессом грунтозабора землесосного снаряда | 1989 |
|
SU1705494A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |

