1
Изобретение относится к системам автоматического управления движением судов на ПОДВОД1НЫХ крыльях в условиях хода по взволнованной поверхности моря.
Известные устройства управления с поэлементным резервированием содержат основные и резервные датчики, подключенные к усилителю, исполнительным устройствам « источникам питания через контакты коммутатора. Они не об:еспеч:ивают безаварийность при полной выработке ресурса основных элементов.
Предлагаемый стабилизатор отличается те.м, что в нем выходы основной гировертикали по крену на .постоянном и переменном токе подключены через пороговые элементы ко входам логического элемента «ИЛИ, выход которого через первую цепь задержки подсоединен к обмотке реле управления, через нормально разомкнутый контакт которого источник постоянного тока подключен к дополнительному входу усилителя-сумматора и через вторую цепь задержюи - к обмотке исполнительного реле. Такое выполнение устройства позволяет обеспечить безаварийность крыльевого режима при полной выработке ресурса основных элементов.
Кроме того, между элементом «ИЛИ и первой цепью задерлски установлен элемент «И, ко второму входу которого через дополиительныи пороговый элемент подсоединен выход датчика скорости хода, что позволяет исключить ложные переключения по крену в водоизмещающем режиме.
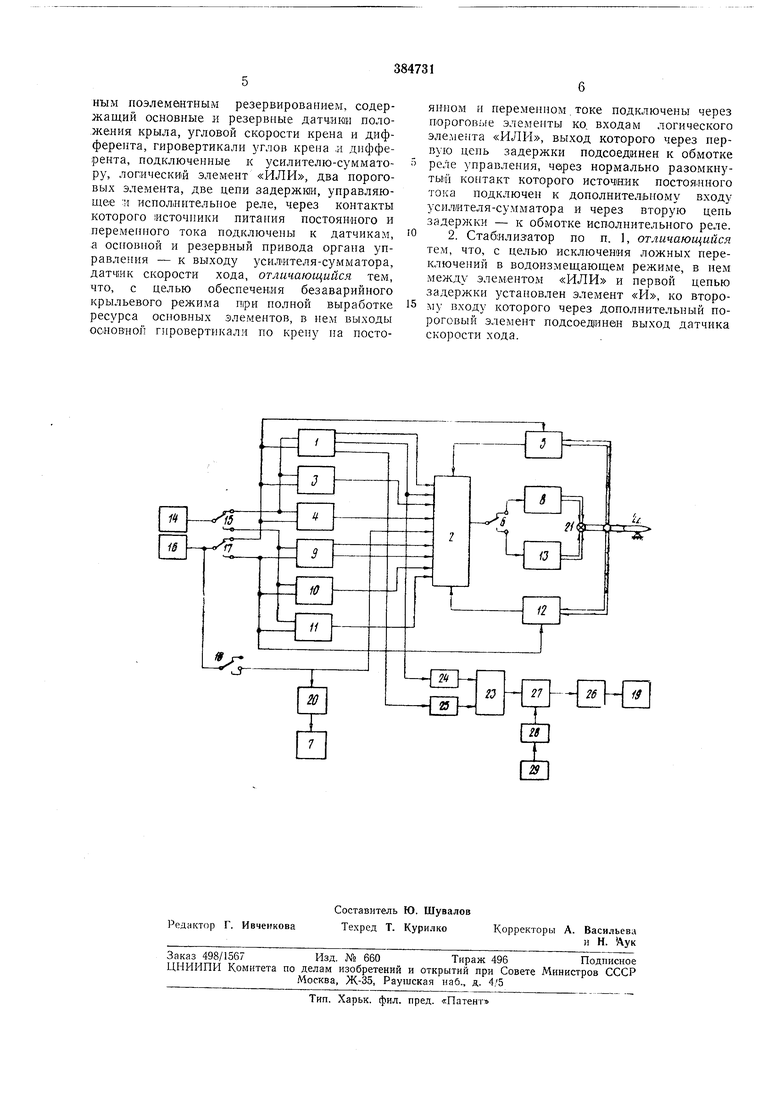
На чертеже представлена принципиальная схема уст1ройства. Гировертикаль /, предназначенная для измерения дифферента и крена и подключенная выхода МИ измеряемых на постоянном токе координат ко входам уси.тителя-сумматора 2, а также подключенные к
0 другим его входам датчики угловых скоростей дифферента 3, крена 4 и положения крыла 5 совместно с подключенным к выходу усилителя 2 через иормально замкнутый контакт пер:еключаюшей пары 6 исполнительного реле 7 приводом 8 органа ун(равления составляют основной канал стабилизации угловых координат.
Апалолично образован резервный канал
0 стабилизации, состоящий из гировертикали 9, датчиков угловой скорости дифферента 10, крена // и положения крыла 12, подключенных к соответствующим входам усилителя 2, и привода 13, подсоединенного к выходу уси25лителя нормально разомкнутым контактом переключаюпд,ей пары 6 реле 7. Датчики л привод основного канала в дальнейщем называются основными элементами устройства, датчики и привод резервного канала - ре0 зервными элементами. Основные и резервные датчики подсоединены к источнику 14 питания переменного тока переключающий контактной парой 15, а к источнику 16 постоянного тока переключающей парой 17 исполнительного реле 7, подключенного к источнику J6 через нормально разомкнутый контакт 18 реле .19 управления и цепь 20 задержки. Контактом 18 к нсточнику 16 подключен дополнитель ный вход усилителя 2 так, что при срабатывании реле 19 на выходе усилителя появляется сигнал, вызывающий через редуктор 21 перекладку унравляющего органа 22 на отрицательный механический унор. Креновый выход основной гировертикали / на постоянном токе, помимо подключения ко входу усилителя-сумматора 2, подсоединен к одному из входов элемента «ИЛИ 23 через пороговый элемент 24. Второй вход элемента «ИЛИ 23 подсоединен к кренопому выходу на переменном токе гировертикали 1 через второй пороговый эле.мбнт 25, а выход элемента 23 подключен к обмотке реле 19 через цепь 26 задержки и элемент «И 27, второй вход которого через нороговый элемент 26 подсоединен к выходу датчика 29 скорости хода. Устройство работает сл едующим образом. Отказ какого-либо элемента основного катала стабилизации угловых координат в конечном ;итоге приводит к появлению крена. Сигнал, пропорциональный углу крена, поступает на пороговые элементы 24 и 25 и при достижеш-ии уровня, соответствующего допустимому крену, проходит через них и ноступает на вход элемента «ИЛИ 23. Наличие двух пороговых элементов 24 и 25 tK элемента «ИЛИ гарантирует контроль крена и в тех случаях, когда увеличение крена вызывается отказом измерителей гировертикали, например разрывом цепей выхода на постоянном токе, обрывом одной 1из цепей питания вертикали и др. С целью увеличения надежности контроля крена один из пороговых элементов 24 подключен к датчику крена основной гировертикали 1 постоянного тока, второй пороговый элемент 25 - к датчику крена переменного тока. После появления сигнала на одном из входов элемента 23 .на его выходе появляется сигнал, который через цепь 26 поступает на обмотку реле управления. Цепь 26 предназначена для предотвращения ложных срабатываний реле 19 при кратковремепных превышениях нороговых значений крена, возможных при ходе на волне повышенной бальности и не приводящих к аварийной ситуации. В случае, если креп, превыщаюпдая пороговое значение, длится больше времени задержки, срабатывает реле -19 и через его нормально разомкнутый контакт 18 подается постоянный сигнал на дополнительный вход усилителя 2 такого знака, что независимо от величины и знака сигналов, поступающих на остальные входы, управляющий орган 22 перемещается к отрицательному упору. При этом руль занимает ноложение, соответствующее минимальной подъемной силе, создаваемой несущнл: элементом. Поскольку все унравляющие органы занимают аналогичное положение, суммарная подъемная сила всех несущих крыльев становится меньше веса и корпус корабля приводняется с максимально возможными ускорениями. В момент срабатывания реле 19 его контактом 8 подается сигнал на останов главных двигателей, и посадка ускоряется за счет снижения тяги двигателя и интенсивного падения скорости хода. Одновременно источник 16 подключается к обмотке реде 7 через цепь 20, предназначенную для удержания устройства в первоначальном состоянии до момента приводнения корпуса. Время задержки, обусловленное цепью 20, должно превышать время переходпого нрощесса по высоте. Это позволяет обеспечить управляемое приводнение корпуса корабля. По истечении выдержки, обусловленной цепью 20, срабатывает исполнительное реле 7, которое переключает питание постоянным н перемегп1ым током с основных элементов на резервные. Для предотвращения ложных срабатываний устройства на режиме выхода в условиях волнения между элементом «ИЛИ и цепью 26 включен элемент «И 27 так, что выход элемента «ИЛИ подсоединен к одному входу элемента 27, ко второму входу которого подключен выход датчика 29 через пороговый элемент 28. Пороговый элемент 28 предназначен для формирования постоянного сигнала после достижения скорости, превыщающей минимальную скорость хода на крыльях. При скоростях, меньщих этого значения, выходной сигнал элемента «ИЛИ 23 не проходит через элемент «И 27 и, следовательно, не поступает па цепь задержки. В результате, пока корабль паходится в водаизмещающем состоянии и возможны большие пакренения из-за малой эффективности управляющих органов, устройство не будет переключаться на резервный капал. Срабатывание исполнительного реле 7 можно использовать для переключения пороговых элементов 24 и 25 на датчики резервной гировертикали 9, поскольку после перехода на резервные элементы желательно осуществлять контроль крена корабля, а при появлении аварийного (критического) значения быстро приводнить корабль и остановить двигатель, так как после вторичного приводнения дальнейшее движение возможно только в водоизмещающем состоянии. Пюедмет изобретения 1. Стабилизатор углов крена и дифферента корабля на подводных крыльях с холодным поэлементным резервированием, содержащий основные и резервные датчики ноложелия крыла, угловой скорости крена и дифферента, гировертикали углов крена л дифферента, подключенные к усилителю-сумматору, логический элемент «ИЛИ, два пороговых элемента, две цени задержюи, управляющее :и испол1нительное реле, через контакты которого источники питания постоянного и неременного тока подключены к датчикам, а основной и резервный привода органа управления - к выходу усилителя-сумматора, датч1ик ско-рости хода, отличающийся тем, что, с целью обеспечения безаварийного крыльевого режима п|ри нолной выработке ресурса основных элементов, в нем выходы основной гировертикали но крену на ностоянном и перемегнюм, токе подключены через пороговые элементы ко, входам логического элемента «ИЛИ, выход которого через первую непь задержки подсоединен к обмотке реле управления, через нормально разомкнутый контакт которого источник постоя нного тока подключен к дополнительному входу усилителя-сумматора и через вторую цепь задержки - к обмотке исполнительного реле. 2. Стабилизатор по п. 1, отличающийся тем, что, с целью исключения ложных переключений в водонзмещающем режиме, в нем между элементом «ИЛИ и первой цепью задержки установлен элемент «PI, ко второму входу которого через дополннтельный пороговый элемент подсоединен выход датчика скорости хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор бортовой и килевой качки глиссера с носовым крылом и закрылками | 1973 |
|
SU495229A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| Автоматический стабилизатор для судов на подводных крыльях | 1976 |
|
SU633762A2 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМПЛЕКСА КОРАБЕЛЬНОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1998 |
|
RU2124260C1 |
| Устройство для пожарной сигнализации | 1977 |
|
SU669373A1 |
| Устройство для контроля работы вентиляторов | 1973 |
|
SU691590A1 |
| Устройство для защиты бесщеточной синхронной машины | 1980 |
|
SU920939A1 |
| Устройство для автоматического переключения нагрузки | 1983 |
|
SU1086502A1 |