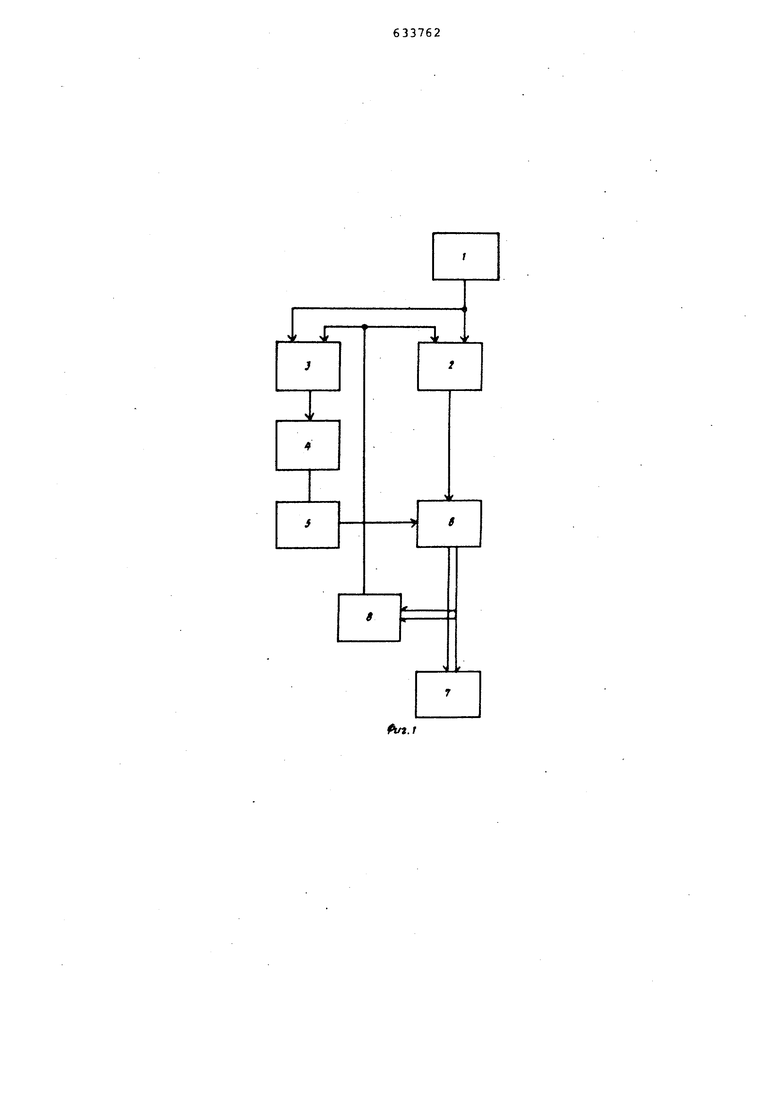
Изобретение относится к судовой автоматике и может быть использовано в системах управления движением подвижных объектов судов на подводных крыльях. В основном авт.св. № 361665 описан автоматический стабилизатор для судов на подводных крыльях, обладающих собственной устойчивостью, содер жащий чувствительные элементы, на выходе которых установлено автоматическое блокирующее устройство, включающее в себя автоматическое реле с заданной уставкой и механический рас пор, приводящий управляющую часть KE ла в нулевое положение при возникновении отклонения судна по крену или дифференту выше установленного преде ла, и исполнительные элементы l . Однако в известном устройстве при сильных ветро-волновых возмущени ях, когда угол отклонения судна превышает максимально допустимый, подвижные части крыльевого оперения находятся в положении, препятствующем увеличению угла отклонения судна, и установка их в этот момент в нейтральное положение приводит не к уменьшению угла отклонения судна, а к его увеличению, так как подвижно оперение крыла в нейтральном положении не создает восстанавливающего момента, препятствующего возрастанию углов крена и дифферента судна. Целью изобретения является повышение надежности устройства. Это достигается тем, что стабилизатор снабжен логическим ключевым элементом, входы которого подключены соответственно к выходам блока чувствительных элементов и датчика обратной связи, а выход - к автоматическому реле с заданной уставкой. На фиг.1 показана структурная схема стабилизатора; на фиг.2 структурная схема логического ключевого элемента. Стабилизатор (см.фиг.1) содержит блок 1 чувствительных элементов, соединенный своим выходом с одним иэ входов электронного усилителя 2 и одним из входов логического ключевого элемента 3, подключенного своим выходом к автоматическому реле 4 с заданной уставкой, выход которого соединен через устройство 5 нулеустановления с гидравлическим приводом Ь, механически связанным с подвижным оперением 7 . Привод 6 снабжен датчиком 8 обратной связи,
iKOToporo подключен к входам логического ключевого элемента 3 и усилителя 2.
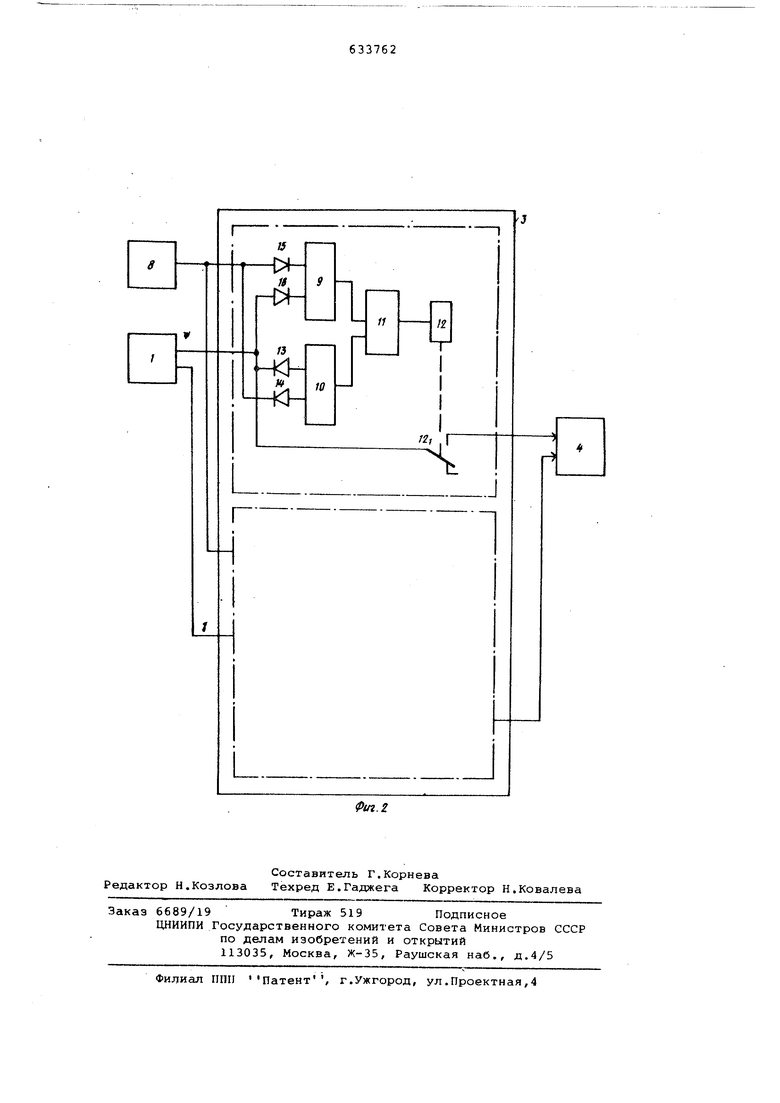
Логический ключевой элемент 3 (см.фиг.2) содержит несколько (по числу контролируемых параметров) каналов, каждый из которых состоит из логических элементе® 9 и 10 и 11 ИЛИ и подключенного к выходу элемента.11 репе 12 с контактом I2j включенным на выходе элемента 3. Входы элементов 9 и 10 связаны с выходами блока 1 и датчика 8 через пары диодов 13, 14 и 15,16, включенные между собой встречно.
Система работает следующим образом.
Сигналы с выхода блока 1 и датчика 8 обратной связи поступают на вход усилителя 2, где прсшсходит формирование управляйнцего сигнала, воздействующего на привод б, механически связанный с подвижным оперением 7 .крьша. Сигнал о положении подвижного оперения с датчика 8, кинематически связанного с последним, поступает на входы усилителя 2 и логического ключевого элемента 3. На вход элемента 3 поступгыют также сигналы с выходов блока i.
Диоды 13-16 элемента 3 включены так, что на входы какого-либо элемента И (5 или 10) поступают сигналы только в ТО случае, если отклонение подвижного оперения: способствует увеличению дифферента V или крена судна (на фиг.2 положительному дифференту соответствует положительный сигнал обратной свяэи), например из-за неисправности стабилизатора.
Вели на оба входа элементов 9,10 поступили сигналы, то на выходе
этих элементов, а также на выходе элемента 11 ИЛИ появляется напряжение, обмотка реле 12 оказывается под током и его нормально- разомкнутый контакт 12j замыкается, подавая сигналдифферента или крена на вход
автоматического реле 4. При превышении сигнала крена или дифферента заданного порогового значения автоматическое реле 4 выдает сигнал, по которому происходит нулеустановление и стопорение подвижного крыльевого оперения 7,
Таким образом, при угловых отклонениях объекта выше предельных значений подвижное оперение крЕЛла будет застопорено в нейтральном положении только в том случае, если положение подвижного оперения способствует этому превышению, и не будет застопорено, если препятствует.
Формула изобретения
Автоматический стабилизатор для судов на подводных крыльях по авт.св.М 361665,о тличающийс я тем, что, с целью повышения надежности, он снабжен логическим ключевым элементом, входы которого подключены соответственно к выходам блока чувствительных элементов и датчика обрат ной связи, а выход - к автоматическому реле с заданной уставкой.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 361665, кл. В 63 В 1/24, 1У/7.
а
-оь//
КН
Ut
10
L..
I
л
j
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ СТАБИЛИЗАТОР | 1974 |
|
SU361665A1 |
| Система стабилизации полупогруженного плавучего средства | 1981 |
|
SU958220A1 |
| СТАБИЛИЗАТОР УГЛОВ КРЕНА И ДИФФЕРЕНТА КОРАБЛЯ НА ПОДВОДНЫХ КРЫЛЬЯХ | 1973 |
|
SU384731A1 |
| Стабилизатор бортовой и килевой качки глиссера с носовым крылом и закрылками | 1973 |
|
SU495229A1 |
| Способ управления выходом на подводные крылья судна и устройство для его осуществления | 1978 |
|
SU703416A1 |
| Система автоматического управления судном на подводных крыльях | 1978 |
|
SU697368A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| МНОГОКОРПУСНОЕ СУДНО | 2022 |
|
RU2781170C1 |
..
