1
Изобретение относится к области автоматики и вычислительной техники.
Известны способы измерения площадей фигур, основанные на фотоэлектрическом преобразовании и накоплении полученного сигнала, пропорционального площади измеряемой фигуры.
Однако известные способы не позволяют измерять площади фигур, имеющих сложную геометрическую форму, так как дают большую погрешность, которая зависит от степени сложности фигур и их ориентации.
Предлагается способ измерения площадей фигур, при котором, с целью устранения зависимости результата измерения от формы и ориентации фигур, многократно перезаписывают видеосигнал с памяти одного промежуточного носителя в память другого промежуточного носителя, меняя каждый раз направление считывания так, что после каждой перезаписи в память промежуточного носителя записывают видеосигнал не только от той части фигуры, которая была выделена в предыдущем кадре одним из известных методов, но и видеосигнал от новых ее частей, выделенных благодаря считыванию в другом направлении. Направления считывания меняют до тех пор, пока не выделят видеосигнал от всей измеряемой фигуры с заданной точностью,
после чего этот видеосигнал измеряют и градуируют в единицах площади.
На фиг. 1 изображена функциональная схема осуществления предлагаемого способа, где / - фотоэлектронный преобразователь; 2 - устройство управления; 3 - первый промежуточный носитель; 4 - синхрогенератор; 5 - устройство селекции и формирования; 6 - решающее устройство; 7 - устройство задержки; 8 - устройство сравнения; 9 - измерительное устройство; 10 - второй промежуточный носитель.
На фиг. 2 схематически изображена пространственная апертура, при этом приняты следующие обозначения:
Xi-i, j-i - незадерн анный сигнал; л:/, f,
,j-i, Xi-i, }, Xi-i,+i; Xi,} i;
xt-t 1, /i 1; Xi;i, i) -
сигналы, задерл анные соответственно на время, равное длительности одного элемента (тэ), двух элементов, длительность строки Тс, Тс+Тэ и т. д. соответственно.
На фиг. 3 представлена эпюра фигуры, площадь которой измеряется. При этом стрелками Х и У указано начальное направление развертки.
Точки а, b, с, d, е, f, g, h, k, I, m, n фигуры обозначают фиксированные моменты считывания; S и Т - точ,ки максимума и минимума функции, описывающей границу фигуры, между которыми определяют число строк.
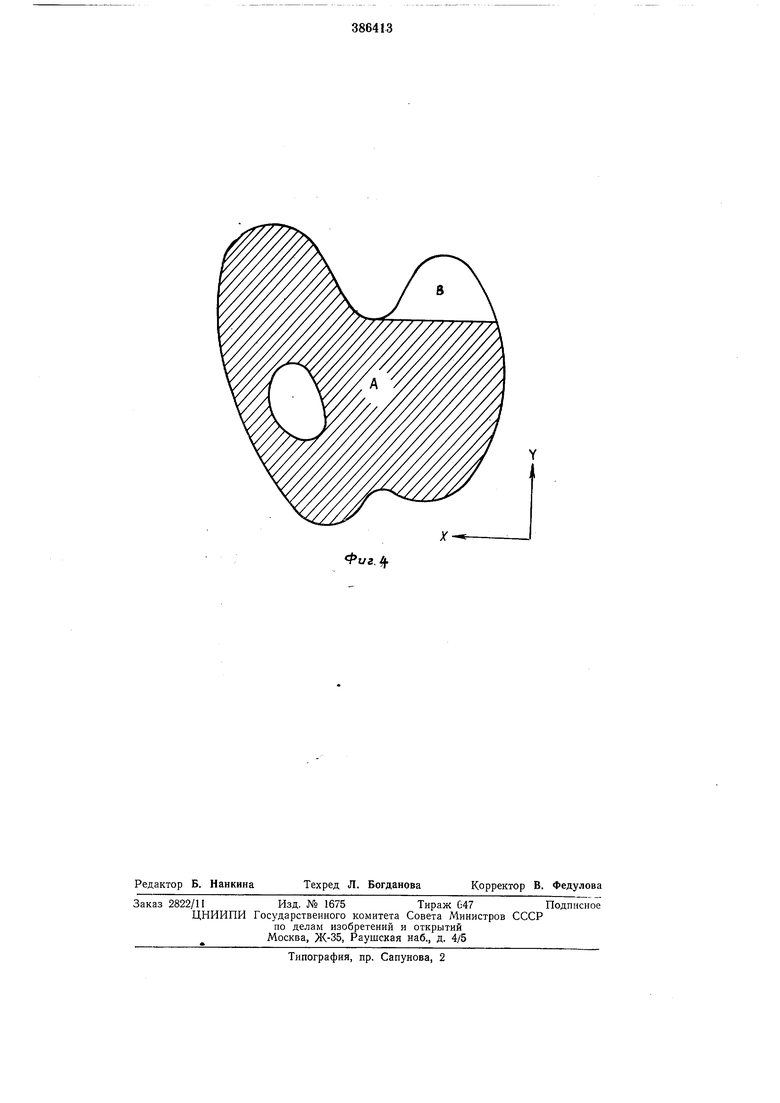
На фиг. 4 приведена энюра фигуры, записанной в иамяти второго нромежуточного носителя носле считывания первого кадра. При этом приняты следующие обозначения: А - область, записанная в память второго промежуточного носителя видеосигналом уровня Uf,; В - область, записанная в память второго промежуточного посителя видеосигналом уровня L/I.
Видеосигнал одного кадра с преобразователя / через управляющее устройство 2 записывают в память первого промежуточного носителя 3, способного работать как в режиме записи видеосигнала, так и в режиме считывания. Направление записи и считывания переключают каждый кадр устройством управления 2, которым управляют синхронизирующими импульсами синхрогенератора 4. Записанный в памяти промежуточного посителя видеосигнал считывают во втором кадре в направлении, например, обратном направлению записи и через устройство управления 2 подают па схему 5 формирования и селекции, где его квантуют на два уровня (О и 1) и подают па рещаюгцее устройство 6. Затем путем сравнения задержанных и незадержанных сигналов формируют видеосигнал уровнем Lo от связных областей измеряемой фигуры, а сигнал от других фигур формируют уровнем Ui. Эти сигпалы подают одновременно на устройство задерл ки 7 и устройство сравнения S, через устройство управления 2 па измерительное устройство 9 и на запись в память второго промежуточного носителя 10.
В память второго промежуточного носителя будет записан уровнем UQ видеосигнал от некоторой части фигуры, выделенной при данном направлении считывания с памяти первого промежуточного носителя, и уровнем Ui видеосигнал от невыделенной части фигуры и других фигур, находящихся в кадре.
В следующем кадре направление считывания изменяют, и видеосигнал через устройство управления 2 подают на устройство 5 формирования и селекции, в котором сигнал селектируют и формируют на уровни Uo и L/I. Сформированный видеосигнал подают, на решающее устройство 6, с носледнего видеосигнал подают вновь па устройство задержки 7, через устройство управления 2 - на запись в память первого промежуточного носителя (куда в данном кадре будет записан уровнем Uo видеосигнал от ранее выделенной части измер.пемой фнгуры и видеосигнал от новых частей той же фигуры, выделенных благодаря другому направлению считывания; видеосигнал от невыделенной части фигуры и других фигур записан уровнем Ui и т. д.): па устройство сравнения 8, через устройство управления 2- и,а измерительное устройство 9. Таким образом, в результате каждого последующего считывания выделяются все новые и новые части сложной фигуры, а так как число частей, на которые можно разбить фигуру определенным образом, конечно, то в результате конечного числа перезаписей, фигура выделится полностью.
В устройстве сравнения 8 сравнивают показания двух считывапий. Если разность ноказаний не превосходит заданной величины б (это будет тогда, когда фигуру выделят полпостью), то в следующем цикле считывания включают измерительное устройство и переключают алгоритм работы решающего устройства так, что вместо уровня Uo на запись в намять промежуточпого носителя подают О (т. е. производят стирапие измеренной фигуры). Если разность показаний болыпе б, то показапия предыдущего считывания сбрасыв а ют.
Использование двух видиконов, работающих поочередно то в режиме записи, то в режиме воспроизведения, позволяет выполнить задержку видеосигнала на время, равное длительности кадра. Элементы пространственной апертуры совместно с решающим устройством выделяют логическим путем видеосигнал от связной области.
С помощью решающего устройства 6 по заданному алгоритму выделяют из полного видеосигнала, ноступающего па его вход, видеосигнал от всей измеряемой фигуры.
Алгоритм работы решающего устройства.
Пусть X - выходной сигнал решающего устройства и пусть отсутствует сигнал со схемы сравнения, то:
1) если jCi, j - О, то X - Q 2) если xi, j и xi-i, j-i xi-i,, xi-i, J-, I - Xi, 0, TO
3)если впервые выполняется условие: - J- 1 и Xi-i, j-i - Xi-i, y-f 1
- , j Q, TO x LJo,
4)если условие 3 выполняется второй и т. д. раз, то X
5) если xi, j I и Xi, i-i V -(-i, y-i V ,, / 1 Vf/o, TO X UQ
6)если Xi, y- 1 и xi, :f/i и при этом
Xi-i, y.-i Д Xi 1, j / Xi-i, у 1 0 V n TO
X - U,;
7)если xi,, TO x Uf
8)если Xi,j - U и л:г-1, y-i , / V /Xi-i, f.i - U, TO x - L/o
9) если Xi, J--U, и Xi-i, V -Xi-i, у V
, yn 0 , TO x U, ЕСЛН na управляющее устройство поступил
сигнал со схемы сравнения, то вместо п. 7
следует: 10) если Xi,, то .
В качестве устройства сравнения 8 может быть иснользован реверсивный счетчик с пороговым устройством. Пороговым устройством выделяют видеосигнал уровня Ug, а реверсивный счетчик работает один кадр в режиме сложения, другой кадр - в режиме вычитания. В качестве измерительного устройства может быть использован любой измерительный прибор.
В качестве примера рассмотрим измерение площади фигуры, эпюра которой представлена на фиг. 3.
В результате фотоэлектрического преобразования и построчного сканирования одного кадра полученный видеосигнал, содержандий полную информацию о фигуре, через устройство управления 2 записывают в память промежуточного носителя 3, после чего система готова для измерения площади фигуры.
Пусть считывание производят слева направо и сверху вниз. При считывании фона видеосигнал имеет нулевой уровень и, следовательно, согласно условию / алгоритма работы решающего устройства в память второго промежуточного носителя 10 записывают видеосигнал, соответствующий уровню 0. При считывании точки а фигуры (считывают по линии а-f) размах видеосигнала не равен нулю, следовательно, если он превышает некоторый порог, при помощи устройства 5 формируют едннину. Таким образом, в момент времени ft, соответствующий считыванию точки а измеряемой фигуры, на вход рещающего устройства 6 подают единицу, на все остальные входы решающего устройства - нули, поэтому выполняется условие п. 2 алгоритма и сигнал на выходе решающего устройства равен единице.
В момент /2, отстоящий от ti на время, равное длительности элемента разложения Тэ, считывается точка в фигуры и поэтому сигнал Xi,j равен единице.
Сигнал Xi, j-i, поступающий на другой вход решающего устройства, также равен единице за счет задержки на время тэ, на остальных входах - нули, следовательно, выполняется условие п. 3 алгоритма и сигнал на выходе решающего устройства формируют уровнем UQ. Это означает, что считывается какая-то фигура.
При считывании других точек фигуры, находящихся на отрезке а-с, всегда выполняется условие п. 5 алгоритма и поэтому на запись в память второго промежуточного носителя от участка в-с фигуры подают видеосигнал уровнем UQ. На участке с--d выполняется условие п. 1 алгоритма и, следовательно, участок с-d, не принадлел ащий фигуре, будет записан уровнем 0. При считывании точки d, принадлежащей фигуре, в память второго промежуточного носителя будет записан видеосигнал (выполняется условие и. 2 алгоритма) , при считывании точки е, отстоящей от точки d на расстояние одного растрового элемента, будет вновь выполняться условие
п. 3 алгоритма, но согласно п. 4 на выходе решающего устройства формируют видеосигнал уровнем L/I. Это естественно, т. к. анриори неизвестно, принадлежит ли участок d-f измеряемой фигуре или нет.
Решение вопроса о принадлежности участка d-/ измеряемой фигуре откладывается до установления связности точек участка d-f с теми точками фигуры, связность которых установлена прн считывании первого кадра в определенном направлении. Очевидно, что при неизменном направлении считывания связность указанных участков можно установить только при наличии большого объема памяти; объем памяти будет зависеть от числа строк, укладывающихся между точками S и Т, но так как это число зависит от формы фигуры, то, следовательно, решение вопроса связности в общем случае практически неосуществимо.
При наличии системы перезаписи и возможности изменения направлений считывания связность, как будет показано ниже, устанавливается естественным путем, за счет задержки видеосигнала.
Таким образом, в памяти второго промежуточного носителя участок е-f будет записан видеосигналом уровня f/i. Если в поле зрепия телевизионной установки кроме измеряемой
фигуры находятся еще и другие фигуры, то они тоже будут записаны видеосигналом уровня и. При считывании точки g и других точек линии g--h фигуры выполняется условие п. 5 алгоритма и таким образом, за счет задержки на время Тс-Тл, пли Т, пли Го+тп устанавливают связность точек участка в-с и участка g-/г измеряемой фигуры следовательно, участок g-h будет записан видеосигналом уровня Uo, а участок к-/ - уровня U.
На участке т-п выполняется условие п. П алгоритма и, следовательно, он будет записан в память промежуточного носителя видеосигналом уровня С/о и т. д.
В результате считывания полного кадра
площадь А измеряемой фигуры будет записана в памяти второго промежуточного носителя видеосигналом уровня Uo, площадь В и другие части - видеосигналом уровня Ui.
Затем переключают режим работы промежуточных носителей (первый промежуточный носитель работает в режиме записи, второй- воспроизведения), направление разверток (например, на обратное, т. е. справа налево,
снизу вверх) и переключают устройство формирования и селекции так, что считываемый видеосигнал подают на селектор, который формирует вновь сигнал уровня С/п пли C/i (компенсируя потери поеобразования).
Если теперь вначале считывают части фигуры, соответствующие уровню U, то выполняется условие п. 9 алгоритма и па запись в память первого промежуточного носителя подают видеосигнал уровня Ui и так далее до
тех пор, пока не начнут считывать часть, ранее помеченную уровнем видеосигнала Uo (например, точка б).
С этого момента при считывании точек площади Л выполняется условие п. 7 алгоритма и на запись подают видеосигнал от площади А уровнем t/o.
При выполнении условия п. 8, т. е. при считывании границы участков А и В, решаюП1ая схема формирует видеосигнал уровня Uo (т. е. опять за счет задержки на время Тс окончательно решают вопрос о связности областей Л и В и, таким образом, после считывания второго кадра в памяти первого промежуточного носителя вся фигура будет записана уровнем t/o видеосигнала). Затем сравнивают результаты двух считываний в устройстве сравнения 8, и так как , то вновь переключают режимы работы промежуточных носителей и направление разверток; при последующем считывании убеждаются в равенстве двух последних считываний и переходят к измерению площади фигуры с одновременным стиранием ее (выполнение условия п. 10 алгоритма).
Погрещность измерения предлагаемым способом в основном определяется устройством перезаписи. Очевидно, что с ростом числа перезаписей погрешность измерения площади будет расти. Но, как показывает анализ, площади частей, наиболее часто встречающихся в практике, могут быть измерены максимум
через четыре перезаписи. Однако требование высокой точности измерений накладывает соответствующие требования на систему перезаписи с точки зрения погрешности.
Кроме того, существует ряд известных методов уменьшения систематических погрешностей (например, введение поправок), описание которых выходит за рамки данного изобретения.
Предмет изобретения
Способ измерения площадей фигур путем сканирования и построчного разложения изображения, формирования амплитуды полученного видеосигнала, построчного суммирования видеосигналов от измеряемой фигуры за время кадра, отличающийся тем, что, с целью устранения зависимости результата измерения от формы и ориентации фигур, после сканирования каждого кадра изменяют направление сканирования, выделяют сигнал начала сканирования фигуры, задерживают его на время длительности строки и на время длительности элемента разложения, затем сравнивают исходный и задержанный видеосигналы, нормируют полученный сигнал по амплитуде, суммируют его с полученным ранее видеосигналом и измеряют результирующий сигнал, затем все указанные операции повторяют до тех пор, пока суммарный сигнал не перестанет увеличиваться.
Фиг. 5
Фиг.

| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОЩАДИ ФИГУР | 1973 |
|
SU367565A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Устройство для распознавания геометрических фигур | 1977 |
|
SU652580A1 |
| Способ опознавания изображений объектов | 1971 |
|
SU446087A1 |
| НОСИТЕЛЬ ЗАПИСИ (ВАРИАНТЫ) | 2000 |
|
RU2214632C2 |
| Полоса фотопленки и копировальное устройство | 1991 |
|
SU1836650A3 |
| СИСТЕМА ДИСПЛЕЯ | 1991 |
|
RU2119187C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1992 |
|
RU2027315C1 |
| Устройство "кольцевого" фотоприёмника цветного изображения для панорамного телевизионно-компьютерного наблюдения | 2019 |
|
RU2710779C1 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ЗАПИСИ/ВОСПРОИЗВЕДЕНИЯ НА ВИДЕОЛЕНТЕ | 1994 |
|
RU2138130C1 |