(54) СПОСОБ ОПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания изображений | 1977 |
|
SU746610A1 |
| Кинотелевизионная камера | 1987 |
|
SU1559429A1 |
| Устройство для определения коор-диНАТ ТОчЕчНыХ СВЕТОВыХ Об'ЕКТОВ | 1978 |
|
SU811302A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И ОПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1973 |
|
SU368626A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1805822A1 |
| Способ формирования видеосигнала в многотрубочной камере цветного телевидения | 1986 |
|
SU1424139A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЙ ПЛОСКИХ ФИГУР | 1972 |
|
SU426144A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата | 2023 |
|
RU2819551C1 |

Изобретение относится к области опо энавания; образцов и может быть исполь;зовано для опознавания многоградационных и двухградационных изображений объектов,
в частности для опознавания видовой при-
,
; надлежности микроооъектов с помощью телевизионной техники.
Известны способы опознавания объектов, согласно которым разлагают поЛе .изображения в растр, выделяют участок
растра с опознаваемым изображением, преобразуют изображение в видеосигналь, формируют сигналы-образцы и сравнивают их с эталонными сигналами.
Однако при считывании многоградаци- онных изображений, повернутых и сдеформированных относительно эталона, такие способы требуют большого объема цифровых вычислений и не обеспечивают достаточной надежности опознавания.
Целью изобретения является ускорение процесса опознавания этих изображений без значительного усложнения аппаратурной реализации способа.
Эта цель достигается тем, что по пре4ложенному способу после выделения участка растра с опознаваемым изображением вращают считывающий растр, суммируют направлении по кадру видеосигналы всех строк при каждом положении считывающего растра и сравнивают суммарные видео- сигналы с эталонными сигналами.
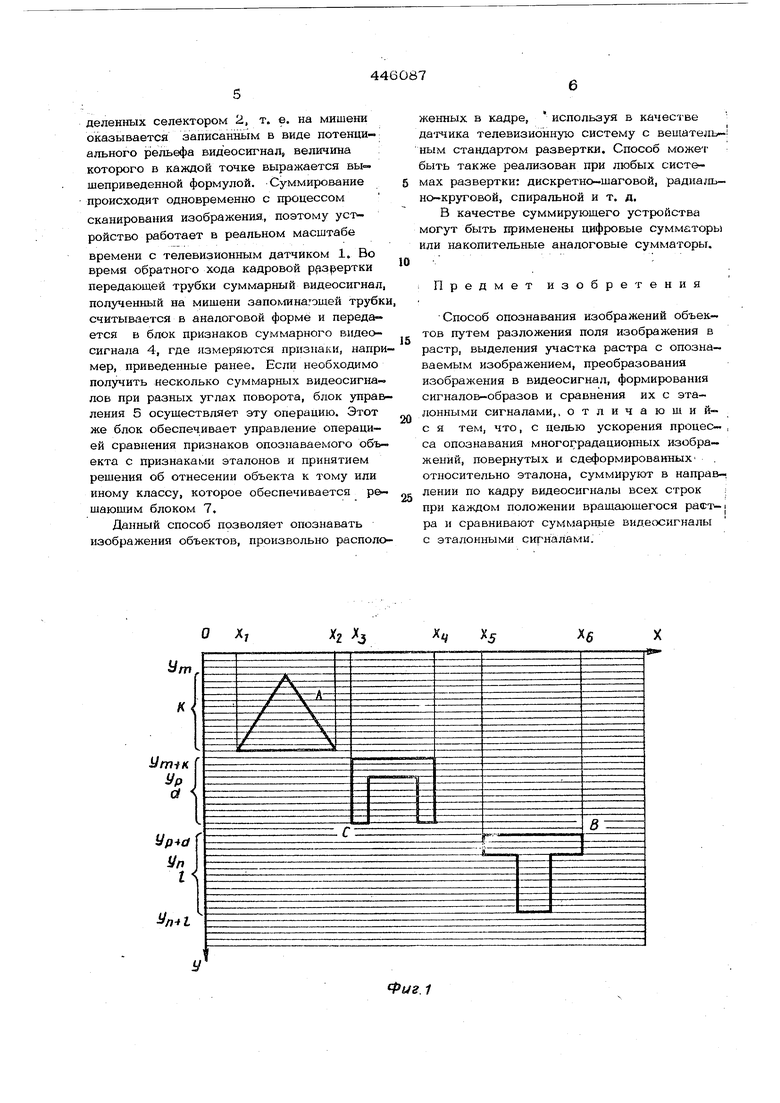
На фиг. 1 изображены три объекта А,
В, С на телевизионном растре; на фиг. 2, а - объект А;
I. 6 - видеосигналы строк объекта А; в - суммарный видеосигнал
- образ объекта А. На фиг. 3 изображены три объекта А,
В, С на телевизионном растре и суммарьные видеосигналы-образцы объектов А, В, С;
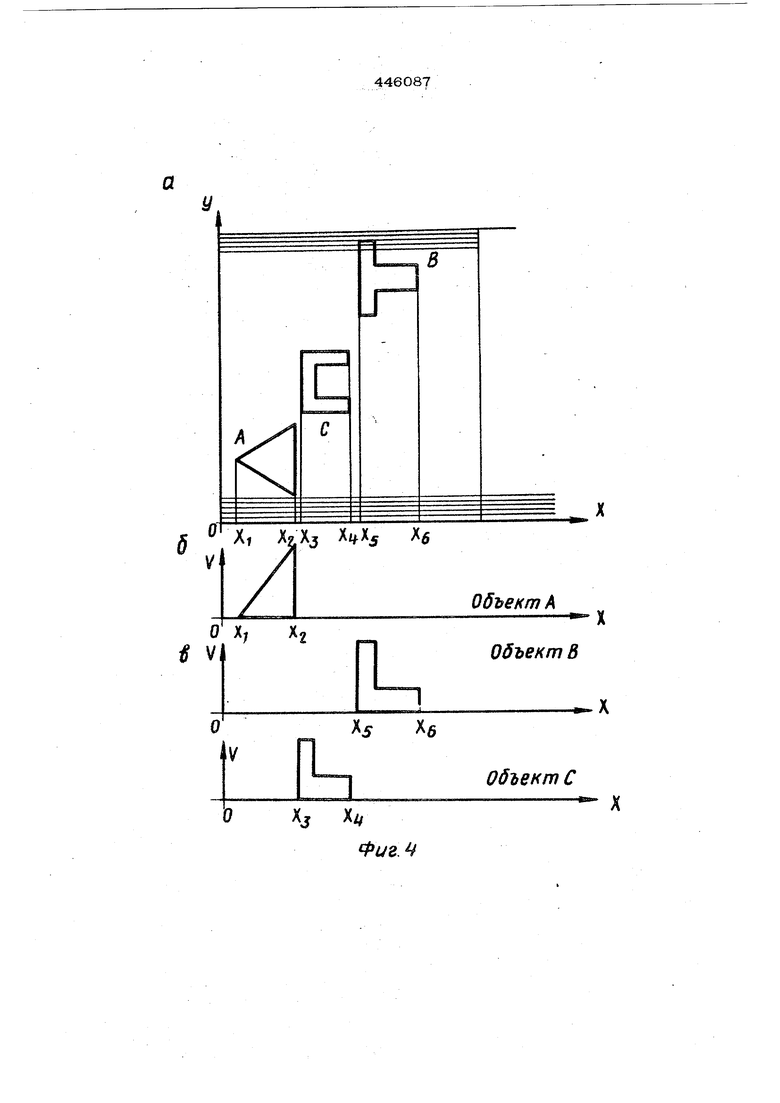
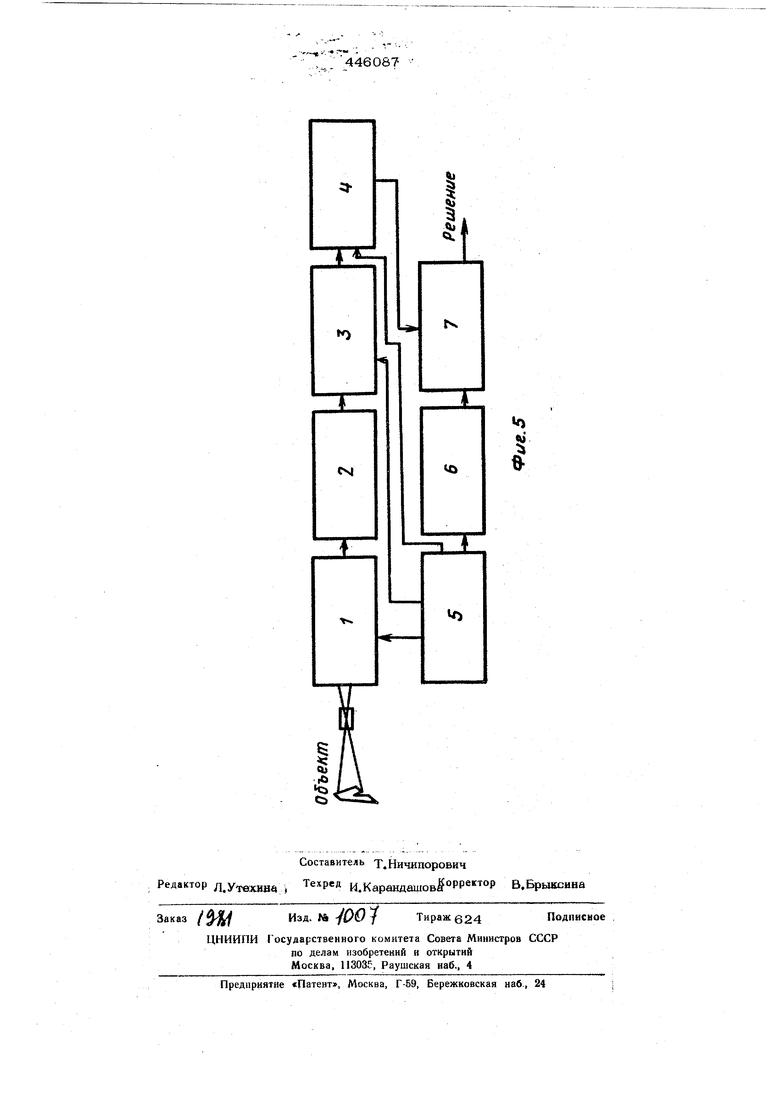
на фиг. 4, а - три объекта А, В, С на телевизионном растре, повернутом, на 90 относительно объектов по сравнению с растром на фиг. 3; б - суммарные видеосигналы-образцы объектов А, Б, С. На фиг. 5 дано устройство; реализующее гфедложенный способ. Способ получения суммарного сигнала заключается в следующем. На фиг. 1 изображен телевизионный растр с присвоенными ему координатами: X - вдоль строки и у - по кадру. В кадре находятся изображения трех объектов (изображения - двухградационные, фон имеет яркость О, объект единичную) фигур (А - треугольник, В - буква Т. С - буква П). Фигура А начинается на строке и кончается на строке занимая k строк, а ее поло .жение на оси X определяется отрезком координатами х.-Хр. Все участки строк, занимаемых объектом А, расположены вну ри этого отрезка j На фиг. 2 показан участок растра с фи гурой А и приведены формы видеосигналов от этой фигуры на всех строках от у до УГП+-К Обозначив размах.видеосигнала в точке с координатой Х, , расположенной на CTpOKeJKaK можно записать, что суммарный видеосигнал от объекта А для точки с координатой х i равен v-.j Таким образом, ло этой формуле можно найти суммарный видеосигнал для любой точки X {, в интервале . Вид суммарного видеосигнала для фигуры А приведен на фиг. 2Ь , . Суммируя построчно видеосигналы для фигуры С со строки Ур по строку лля точек в ., а для фигуры В со стро 1И1тервале о 4 по строку у . в и1ггервале получим суммарные видеосигналы- образцы, изображенные для этих фигур на фиг. 3. Из конфигураций этих суммарных сигналов-образов можно заключить, что они имеют совершенно характерные формы позволяющие классифицировать эти объекты Чтобы сделать описание инвариантным к смешениям, поворотам и деформациям изоб ражения, нужно получить несколько сумма ных видеосигналов при различных yiviax по ворота растра передающей трубки относите но изображения, проекцируемого на ее фотокатод. На фиг. 4, а приведено исходное изображение, но растр передающей трубки ортогонален растру на фиг. 1, и суммарные видеосигналы для объектов А, В, С для этого случая показаны на фиг. 4, б, Из сравнения образов фт. 3 и фиг, 4 видно, что образы объекта А в обоих случаях отличаются от образов объектов В и i С, а образы объектов В и С при распело, | жении растра, как на фиг. 4, между собой не различаются, т. е, эти объекты могут быть классифицированы только по суммарным видеосигналам, полученным для растра, ортогонального растру на фиг. 4, Сокращение описания опознаваемого объекта по данному способу; происходит за счет замены трехмерного ввдеосигнала исходного изображения двухмерным суммар ным видеосигналом-образом. Каждый сум- марнъ1Й видеосигнал может быть описан несколькими признаками, например числом вершин и их положением относительно начала и конца видеосигнала,крутизной склонов и положением склонов относительно вершин и т. д. Причем эти признаки удобно представлять в цифровой форме. Для мно- , 1 оградационных изображений суммируют видеосигналы по вышеприведенной формуле и получают признаки аналогично. Способ может быть реализован в устройстве (фиг. 5), содержаш им телевизионный датчик 1, селектор изображений объек-: тов 2, блок суммирования 3, блок признаов суммарного видеосигнала 4 блок управ-: ления 5, блок признаков эталонов 6 и ре- ; шаюший блок 7. В блок признаков эталонов 6 вводят признаки суммарных видеосигналов в цифровой форме, которые определяются экспе- : риментально для каждого класса опознава- емых объектов.; Телевизионным датчиком 1 видеосигнал подается на селектор изображений объек- тов 2, КС горы и выделяет участок растра, занятогю изображением опознаваемого объекта. Видеосигнал с выделенного участка растра подается в блок 3, который может бьпь построен с использованием запоминающей электроннолучевой трубки, например типа ЛН-17. В этом блоке суммируются видеосигналы всех строк с выделенного ; участка растра, что осуществляется выключением кадровой развертки на трубке памяти. При этом записывающий луч прочерчивает на мишени трубки памяти одну и ту же траекторию для всех строк кадра,. Селектор 2 открывает записывающий луч в те моменты времени, когда луч переда- : ющей трубки считывает изображение объек- та, и, таким образом, на одну и ту же трэссу мищени трубки памяти накладыва- , ются видеосигналы с участком строк, вы-
деленных селектором 2, т. е. на мишени оказывается записанным в виде потенци-; ального рельефа видеосигнал, величина которого в каждой точке выражается Bbt шеприведенной формулой. Суммирование происходит одновременно с процессом сканирования изображения., поэтому устройство работает в реальном масштабе
времени с телевизионным датчиком 1. Во время обратного хода кадровой р 13рертки передающей трубки суммарный видеосигнал, полученный на мишени зaпo fflнarDщeй трубки считывается в аналоговой форме и передается в блок признаков суммарного видеосигнала 4, где измеряются признаки, например, приведенные ранее. Если необходимо получить несколько суммарных видеосигналов при разных углах поворота, блок управления 5 осуществляет эту операцию. Этот же блок обеспечивает управление операцией сравнения признаков опознаваемого объекта с признаками эталонов и принятием решения об отнесении объекта к тому или иному классу, которое обеспечивается р&щающим блоком 7.
Данный способ позволяет опознавать изображения объектов, произвольно располоО X, h %
женных в кадре, используя в качестве датчика телевизионную систему с вешатель- ным стандартом развертки. Способ может быть также реализован при любых системах развертки: дискретно-шаговой, радиа;ш- но-круговой, спиральной и т. д.
В качестве суммирующего устройства могут быть применены цифровые сумматоры или накопительные аналоговые сумматоры.
: Предмет изобретения
Способ опознавания изображений объектов путем разложения поля изображения в растр, выделения участка растра с опознаваемым изображением, преобразования изображения в видеосигнал, формирования сигналов-образов и сравнения их с эталонными сигналами,, отличающий- с я тем, что, с целью ускорения процес- , са опознавания многоградацио}шых изображений, повернутых и сдеформированных относительно эталона, суммируют в направ-, лении по кадру видеосигналы всех строк ; при каждом положении вращающегося paci i pa и сравнивают суммарньш видесхзигналы с эталонными сигналами. ч
Фиг.1 %
g Xt Xz,X3 X/fX5 X
OX, X
2
# V
1 Xj Х,
x
Объект A
Объект В
Xj Хб
Объект С
Фиг.
