Изобретение относится к системам ТВ автоматики, в частности к телевизионным следящим системам.
Известен способ слежения за объектом, заключающийся в том, что преобразуют аналоговый телевизионный видеосигнал от изображения объекта в цифровой телевизионный видеосигнал от изображения объекта, который запоминают на первом кадре в качестве эталонного, а на всех других кадрах в качестве текущего, формируют взаимно корреляционную функцию текущего и эталонного изображений и определяют экстремум взаимно корреляционной функции, координаты которого принимают в качестве координат точки слежения .
Известно устройства слежения за объектом, содержащее аналого-цифровой преобразователь, вход которого является информационным входом устройства, блок памяти эталонного изображения и последовательно соединенные блок текущего изображения, коррелятор и блок управления записью и считыванием телевизионных кадров, который первый и вторым выходами соединен с управляющими входами соответственно блока памяти эталонного изображения и блока памяти текущего изображения, а третий вход которого является информационным входом устройства, а вход блока памяти эталонного изображения соединен со вторым входом коррелятора.
Технической задачей изобретения является повышение точности и надежности слежения.
Указанная техническая задача решается следующим образом.
В способе слежения за объектом, заключающемся в том, что преобразуют аналоговый телевизионный видеосигнал от изображения объекта в цифровой телевизионной видеосигнал от изображения объекта, который запоминают на первом кадре в качестве эталонного, а на всех последующих кадрах в качестве текущего, формируют взаимно корреляционную функцию текущего и эталонного изображений и определяют экстремум взаимно корреляционной функции, координаты которого принимают в качестве координат точки слежения, производят предварительную обработку цифрового телевизионного видеосигнала от изображения объекта путем селекции в нем участков, соответствующих яркостным аномалиям в изображении объекта, затем выделяют в цифровом телевизионном видеосигнале информативные элементы, формируют эталонную маску, при этом взаимно корреляционную функцию формируют только по элементам, определяемым эталонной маской.
Кроме того, в способе слежения за объектом в цифровом телевизионном видеосигнале от изображения объекта осуществляют селекцию участков, соответствующих яркостным аномалиям в изображении объекта, двумерными направленными операторами дифференцирования с последующим присвоением отклику максимального из полученных значений по каждому из направлений.
Кроме того, в способе слежения за объектом выделения информационных элементов производят путем нахождения локальных экстремумов на изображении от объекта, полученном после предобработки.
Кроме того, в способе слежения за объектом формирования эталонной маски производят путем дополнения информационных элементов соседними элементами в изображении от объекта и формирования списочного массива координат эталона.
А также тем, что устройство слежения за объектом, содержащее аналого-цифровой преобразователь, вход которого является информационным входом устройства, блок памяти эталонного изображения и последовательно соединенные блок памяти текущего изображения, коррелятор и блок управления записью и считыванием телевизионных кадров, который первым и вторым выходами соединен с управляющими входами соответственно блока памяти эталонного изображения и блока памяти текущего изображения, а третий выход которого является информационным выходом устройства, а выход блока памяти эталонного изображения соединен со вторым входом коррелятора, снабжено последовательно соединенными блоком подавления в цифровом телевизионном видеосигнале участков с однородной яркостью и подчеркивания в нем участков, соответствующих яркостным аномалиям в изображении объекта блоком памяти исходного изображения, блоком выделения информативных элементов, блоком формирования эталонной маски, блоком памяти адресов эталона и блоком управления адресацией и записью эталона, второй вход которого является входом команды "Разрешение захвата", а первый, второй, третий и четвертый выходы которого соединены с управляющими входами соответственно блока выделения информативных элементов, блока формирования эталонной маски, блока памяти адресов эталона и блока управления записью и считыванием телевизионных кадров, при этом блок выделения в цифровом телевизионном видеосигнале участков с однородной яркостью и подчеркивания в нем участков, соответствующих яркостным аномалиям в изображении объекта, соединен информационным входом с выходом аналого-цифрового преобразователя, управляющим входом с четвертым выходом блока управления записью и считыванием телевизионных кадров, а выходом с информационными входами блока памяти текущего изображения, блока памяти эталонного изображения и блока памяти исходного изображения, который управляющим входом соединен с пятым выходом блока управления записью и считыванием телевизионных кадров.
На фиг. 1 изображена функциональная схема устройства.
На фиг. 2 - вариант реализации блока предварительной обработки, на фиг. 3 - вариант реализации блока выделения информационных элементов, на фиг. 4 - вариант блока формирования эталонной маски, на фиг. 5 - вариант реализации корректора, на фиг. 6 - 8 - вариант реализации блока управления 6, на фиг. 9 - 10 - вариант реализации блока управления 11, на фиг. 11 - алгоритм программы блока 6, на фиг. 12 - алгоритм программы блока 11.
Способ слежения состоит в преобразовании аналогового видеосигнала от ТВ-камеры в цифровую форму, в предварительной обработке полученного цифрового изображения, запоминания его на первом кадре в качестве эталонного, а на всех последующих кадрах в качестве текущего, выделения в эталонном изображении информативных элементов, формирования эталонной маски и формирования взаимно корреляционной функции текущего и эталонного изображений по элементам, определяемым эталонной маской, определения экстремума взаимно корреляционной функции, координаты которого принимаются в качестве координат точки слежения.
Предварительная обработка исходного изображения может производиться двумерными направленными операторами дифференцирования с последующим присвоением отклику максимального из полученных значений по каждому направлению.
Выделение информационных элементов может производиться путем нахождения локальных экстремумов на изображении, полученном после предобработки.
Формирование эталонной маски может быть произведено дополнением информационных элементов соседними элементами в изображении с последующим формированием списочного массива координат эталона.
Устройство слежения содержит последовательно соединенные аналого-цифровой преобразователь 1, блок предварительной обработки 2, выход которого соединен со входами памяти текущего 3 и эталонного 4 изображений, выходы которых соединены со входами коррелятора 5, первый блок управления 6, вход которого соединен с выходом коррелятора 5, а первый и второй выходы соединены соответственно с управляющими входами памяти 4 и 3.
Кроме того, в устройстве содержатся последовательно соединенные память исходного изображения 7, блок выделения информативных элементов 9, блок формирования эталонной маски 9, память адресов эталона 10 и второй блок управления 11, выходы которого соединены со вторым входами блоков 8, 9, 10 и 6. Третий и четвертый выходы блока управления 6 соединены с также управляющими входами блоков 2 и 7, а пятый выход является информационным выходом устройства.
Входным сигналом устройства является аналоговый видеосигнал от ТВ-камеры, либо тепловизионного или какого-либо другого датчика растрового типа, поступающий на вход аналого-цифрового преобразователя 1, в котором преобразуется в цифровую форму.
С выхода аналого-цифрового преобразователя цифровой массив поступает на блок предварительной обработки 2, предназначенный для подчеркивания в изображении яркостных аномалий и подавления участков однородной яркости.
В частности, в блоке 2 может быть реализована дифференциальная обработка на базе различных операторов дифференцирования: операторов Собеля, Робертса, Кирша и др. (Прэтт У "Цифровая обработка изображений" т.2, Москва, "Мир", 1982, стр. 500-522).
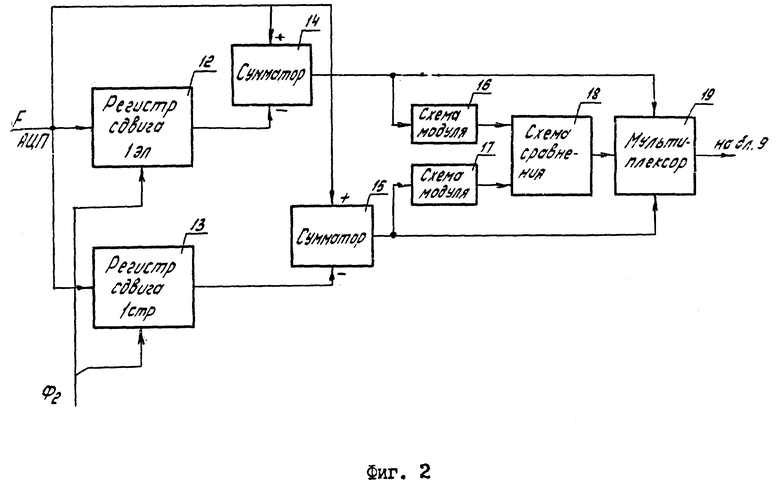
На фиг. 2 изображен вариант реализации блока предобработки на базе вычисления дискретных разностей раздельно по вертикали и горизонтали. Подчеркивание вертикальных перепадов осуществляется путем вычисления дискретной разности соседних элементов в строке:
G1(j,k)=F(j,k) - F(j + 1,k)
Аналогично осуществляется подчеркивание горизонтальных перепадов путем вычисления разности элементов в двух соседних строках:
G2(j,k) = F(j,k) - F(j + 1,k)
Результируемое значение элемента выходного массива определяется как максимальное для двух массивов G1 и G2:
G(j,k) = max (G1, Gr)
С выхода блока предобработки 2 полученный массив изображения записывается в блок памяти эталона 4 и блок памяти исходного изображения 7. Управление записью ТВ кадра осуществляется с помощью первого блока управления 6 по команде "Разрешение захвата", поступающей на вход второго блока управления 11 и далее транслируемой на первый блок управления. По окончании записи первого ТВ кадра производится считывание изображение из блока памяти исходного изображения 7.
Значение кода яркости элементов изображения с выхода АЦП 1 поступает на входы регистра 12, формирующего задержку на 1 элемент по строке и регистра 13, формирующего задержку на 1 строку.
На сумматорах 14 и 15 реализованы функции разности смежных элементов по строке и между соседними строками.
Полученные значения разности поступают на схемы модуля 16, 17 и затем сравниваются по абсолютной величине на схеме сравнения 18. В зависимости от результата сравнения мультиплексор 19 коммутирует на выход блока предобработки значение, большее по абсолютной величине.
Тактирование регистров сдвига 12 и 13 производится с помощью тактовой частоты Ф2, вырабатываемой генератором в блоке управления 6. С выхода блока предварительной обработки 2 разностное изображение записывается в память исходного изображения 7, при этом адресация памяти 7 и формирование импульсов записи осуществляется с помощью первого блока управления 6.
С выхода блока памяти исходного изображения 7 разностное изображение G подается на блок выделения информативных элементов 8. В качестве информативных элементов могут быть использованы точки локальных экстремумов, соответствующие границам контрастным переходов и превышающие по значению заданный порог.
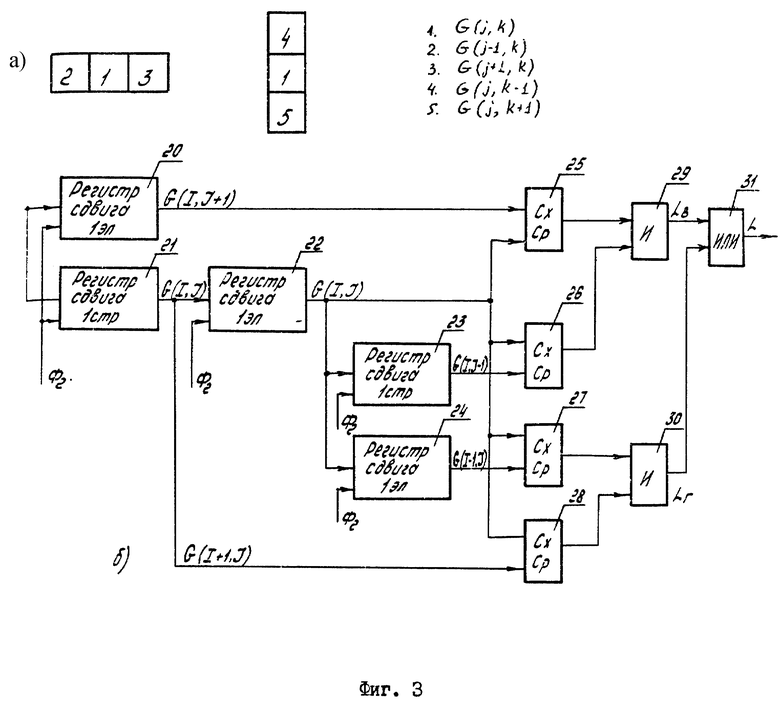
В частности, при использовании двух масок размером 3 х 1 по горизонтальному и вертикальному направлениям алгоритм выделения локальных экстремумов (ЛЭ) определяется следующими выражениями:

L(j, k) = Lв(j, k) V Lг (j, k),
где Lв (j, k), Lг(j, k) - отклик вертикального и горизонтального операторов выделения ЛЭ,
L(j, k) - выходной массив блока выделения информативных элементов.
В блок-схему выделения информативных элементов, реализующую алгоритм поиска ЛЭ, входят три последовательных регистра сдвига 20, 22, 24, каждый из которых реализует задержку на один элемент по строке, а также два регистра сдвига 21, 23, формирующие задержку соответственно на одну строку, четыре схемы сравнения 25, 26, 27 и 28, две схемы совпадения 29, 30. Одна схема "ИЛИ" 31. Значение текущего элемента G(j, k), для которого оценивается наличие локального экстремума, снимается с выхода регистра сдвига 22. Это значение сравнивается со значением смежных элементов в соседних строках на схемах сравнения 27 и 28. При выполнении условия "строго больше" на выходах схем сравнения появляется значение "единица". Появление единичного значения на выходе схемы "И" 29 регистрирует наличие локального экстремума в вертикальном направлении, и "единица" на выходе схемы "И" 30 в горизонтальном направлении. Выходы схем 29 и 30 объединяются на схеме "ИЛИ" 31 и затем записываются в ОЗУ локальных экстремумов 32, расположенное в блоке 9 в виде бинарного массива. Сигналы адресации и записи поступают на ОЗУ от второго блока управления 11.
С выхода блока выделения информативных элементов 8 полученный бинарный массив локальных экстремумов поступает на блок формирования эталонной маски 9.
Назначение блока формирования эталонной маски - назначение точек эталонного массива, которые будут использоваться для формирования корреляционной функции в корреляторе 5 и формирование списочного массива адресов эталона. В самом простом случае эталонная маска может быть составлена из адресов элементов изображения, содержащих все точки локальных экстремумов. С целью увеличения числа точек, участвующих в формировании корреляционной функции, можно использовать дополнение точек локальных экстремумов ближайшими соседями. С помощью процедуры дилатации (см. Serra I. Image Analysis and Mathematical Morphology, London, Academic, 1982 г.).
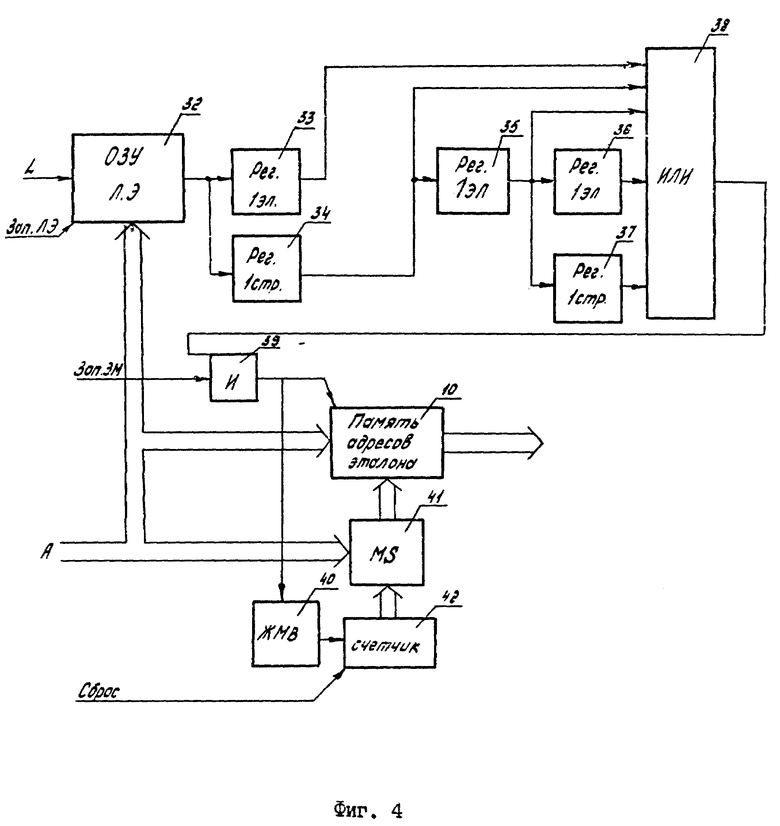
Вариант реализации блока 9 с простым преобразованием двумерного бинарного массива локальных экстремумов в списочный одномерный массив координат точек эталонной маски изображен на фиг. 4.
С помощью адресных и управляющих сигналов, поступающих от второго блока управления 11 производится считывание значений массива локальных экстремумов из ОЗУ 32. Одновременно адресные сигналы заводятся на информационный вход памяти адресов эталона 10. На регистрах 33-37 осуществляется задержка кода, считываемого из ОЗУ 32, по отношению к текущему значению адреса на адресном входе ОЗУ 32. На регистре 33 сохраняется значение предыдущего элемента в данной строке, на регистрах 34, 35, 36 - смежного и двух задержанных элементов, в соседней строке и на регистре 37 содержится значение элемента, задержанного на 2 строке и 1 элемент.
Таким образом, как бы формируется маска в виде креста с центром, сдвинутым по отношению к текущему адресу на 1 элемент по строке и 1 элементе по столбцу. Если хотя бы один из элементов изображения локальных экстремумов, совпадающих с маской, равен единице, то на выходе схемы "ИЛИ" 38 появится единичное значение. После установки очередного значения адреса выдается импульс записи по цепи "Зап. ЭМ", который поступает на схему "И" 39. При наличии на выходе схемы "ИЛИ" 38 единичного значения этот импульс проходит через схему "И" 39 и осуществляет запись текущего значения адреса в память адресов эталона 10. Задним фронтом импульса запускается мультивибратор 40, формирующий импульс, который поступает на вход счетчика 42, увеличивая значение кода на единицу. Если значение на схеме "ИЛИ" 38 равно нулю, то схема "И" 39 запрещает формирование импульса записи и изменение кода счетчика 42. Таким образом, после полного перебора адресов ОЗУ ЛЭ 32 в памяти адреса эталона будут записаны последовательно значения адресов точек локальных экстремумов и их соседей по вертикали и горизонтали, сдвинутых на единицу.
Мультиплексор 42 служит для переключения адресации памяти 10 в режиме считывания непосредственно от второго блока управления 11. Из-за задержки на регистрах 33-37 значения адресов анализируемой точки, записанные в память 10, оказываются сдвинутыми на строку и один элемент. Для компенсации сдвига поле ввода массива адресов из памяти 10 в блок 11 программно осуществляется коррекция значений в соответствии с формулой:
Iэi = Iэi -1,
Kэi = Kэi -1
Сформированный массив адресов эталона из второго блока управления 11 считывается в первый блок управления 6, где используется для управления коррелятором.
На этом этап формирования эталонной маски заканчивается.
Рассмотрим формирование взаимно корреляционной функции и оценку координат.
На каждом ТВ кадре текущее изображение, прошедшее предобработку в блоке 2, записывается в память текущего изображения 3 под управлением блока 6. После окончания записи производится синхронное считывание из памяти текущего 3 и эталонного 4 изображений с помощью адресных и управляющих сигналов от блока управления 6. При этом в качестве адресов используются адреса эталона, содержащиеся в памяти 10.
Считанные значения элементов изображений из памяти 3 и 4 поступают на входы коррелятора 5.
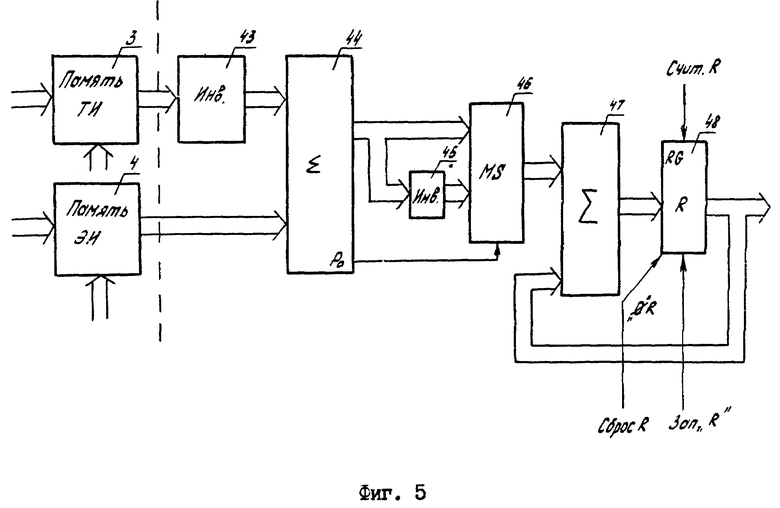
Схема коррелятора 5, в которой в качестве аналога корреляционной функции используется сумма абсолютных разностей, представлена на фиг. 5.
Значения элементов текущего и эталонного изображений (первое через инвертор 43) поступают на входы сумматора 44, на выходе которого формируется разностный сигнал Gэ(j,k)-Gг(j-α,k-β), где α и β - координаты сдвига, формирование которых производится в блоке управления 6 и поясняется ниже. С помощью инвертора 45 и схемы мультиплексора 46 обеспечивается формирование модуля разности:
При положительном значении разности мультиплексор 46 подключает на выход непосредственно выходной код сумматора 44. При отрицательном значении разности на выходе переноса сумматора 44 появляется сигнал, переключающий мультиплексор 46 на сигнал, прошедший через инвертор 45.
Значения модулей разности элементов текущего и эталонного изображений поступают на накопитель, собранный на сумматоре 47 и 48.
После считывания всех точек, определяемых эталонной маской, на регистре 48 будет значение суммы модулей разностей вида
где Ωэ - совокупность точек, определяемых эталонной маской и содержащихся в памяти адресов эталона.
Значения суммы модулей разностей для различных смещений представляют собой функцию сходства текущего и эталонного изображений.
В отличие от классической корреляционной функции наилучшее совмещение изображений определяется по минимуму функции R(α,β).
При этом координаты минимума αμ и βμ определяемы как
αμ, βμ= arg minR(α,β), α,β ∈ A,
где A - заданная область допустимых сдвигов.
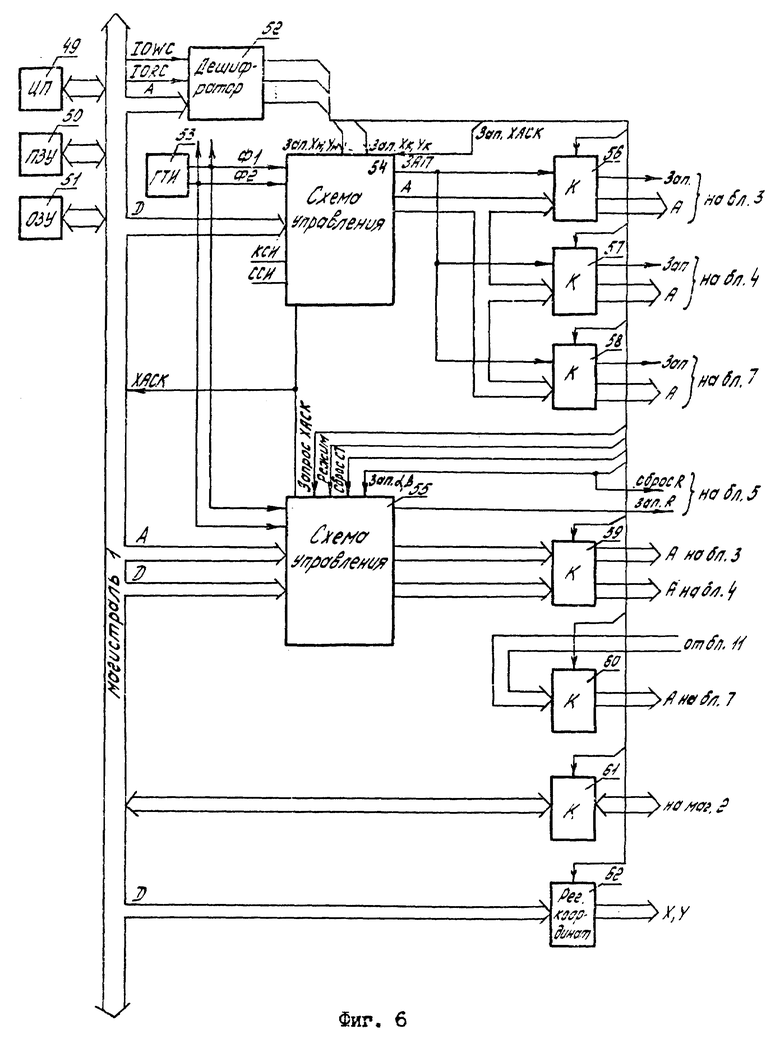
Блоки управления 6 и 11 построены на базе микропроцессорных комплектов и содержат аппаратную и программную части. Схемы блоков управления 6 и 7 представлены на фиг. 6, 9.
В состав блока 6 входят центральный процессор 49, ПЗУ программ 50, оперативное запоминающее устройство 51, реализующее локальную память процессора, дешифратор адреса 52, генератор тактовых импульсов 53, схемы управления 54, 55, буферные регистры (ключи) 56 - 62.
Центральный процессор 49 может быть реализован на базе МПК БИС 1810 по типовой схеме (см. В.А.Горбунов и др. "Справочное пособие по микропроцессорам и микро-ЭВМ. М. , "Высшая школа", 1988 г., стр.198-208) - в максимальной режиме с выходом на мультиплексную магистраль типа И41. В стандартную конфигурацию также входит ПЗУ 50, содержащее программное обеспечение устройства и ОЗУ 51.
Дешифратор адреса 52, собранный по стандартной схеме, обеспечивает формирование сигналов управления и коммутации блоков устройства. Входными сигналами дешифратора является код шины адреса A и сигнала шины управления 10WC, 10RC. Аналогичная схема дешифратора, в частности, используется в модуле интерфейсов ПП ЭВМ ЕС 1840 (см.Горбунов В.А. "Справочное пособие по микропроцессорам и микро-ЭВМ, М., "Высшая школа", 1988 г., рис. 7.6).
Генератор тактовых импульсов 53 типа КР 580ГФ24 формирует две сдвинутые по отношению друг к другу импульсные последовательности, поступающие на схемы управления 54 и 55. Схема управления 54 обеспечивает режим записи изображений в память текущего, эталонного и исходного изображений 3, 4, 7. Для обеспечения записи фрагмента ТВ кадра работы схемы синхронизируется кадровыми и строчными синхроимпульсами КСИ и ССИ, которые в различных конфигурациях системы могут поступать либо от ТВ камеры, либо выделяться из входного видеосигнала с помощью селекторов синхроимпульсов, либо поступать от общего синхрогенератора следящей системы.
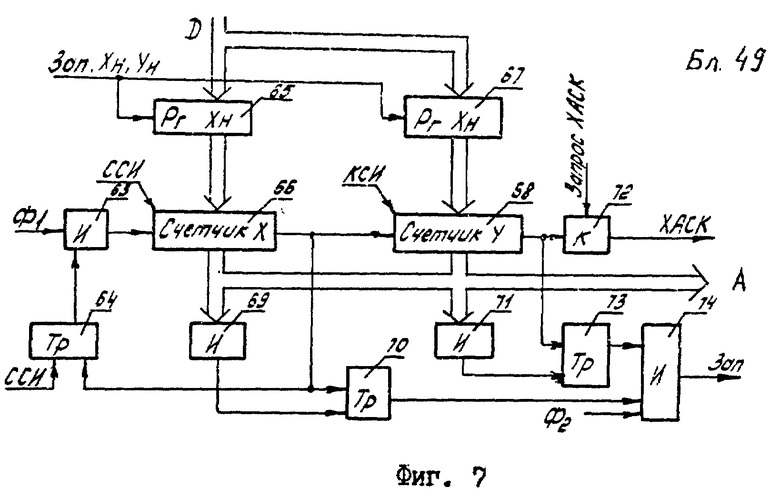
По команде "Зап. Xн, Yн" с дешифратора 52 производится запись от процессора 49 значений инверсного кода координат Xн, Yн в регистры 65, 67 (фиг. 7). С помощью импульсов КСИ и ССИ в счетчики 66, 68 регистров Xн 65, Yн 65 производится запись инверсных значений кода координат начала фрагмента ТВ кадра, соответствующего "следящему окну". По концу импульса ССИ триггер 64 открывает схему совпадения 63, разрешая поступление тактовых импульсов на счетный вход счетчика 66. С каждым импульсом состояние счетчика увеличивается на единицу. По достижении кода счетчика 66 значения "0" схема совпадения "И" 69 формирует импульс, перебрасывающий триггер строчного окна 70. Окончание "строчного окна" фиксируется импульсом переноса счетчика 66, который сбрасывает триггер 64, запрещая прохождение импульсов Ф1 на счетный вход счетчика до прихода следующего импульса ССИ и триггер 70. Импульс переноса также поступает на счетный вход счетчика 68, увеличивая его значение на единицу. "Кадровое окно" формируется аналогично строчному с помощью схемы совпадения 71 и триггера 73.
Строчное и кадровое окна поступают на вход схемы совпадения 74, куда также заводятся тактовые импульсы Ф2. С выхода схемы 74 в интервале "окна" выдаются импульсы записи, поступающие через соответствующие шинные формирователи 56 - 58 (фиг.6) на входы записи блоков памяти изображения 3, 4, 7. Адресация памяти осуществляется сигналами адреса А с выходов счетчиков 66 и 68. Сигнал с выхода переноса счетчика 68 через ключ 72 поступает на магистраль 1 и далее на вход процессора ХАСК, сигнализируя об окончании записи текущего ТВ кадра.
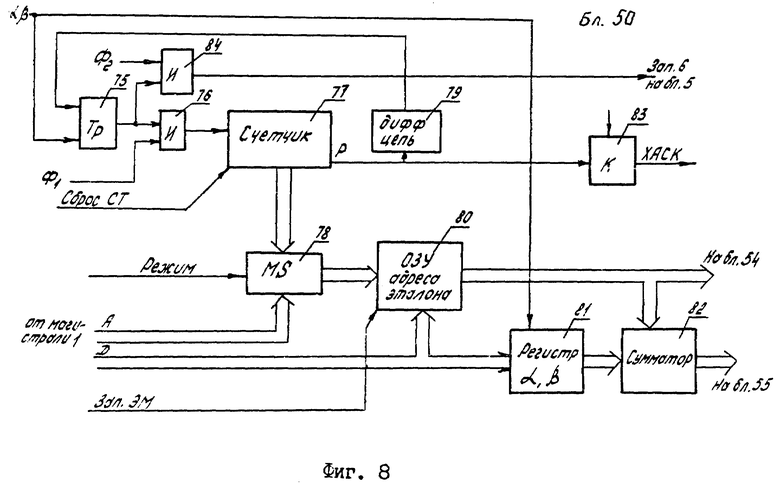
Схема управления 55 (фиг.8) обеспечивает режим считывания информации из памяти текущего и эталонного изображений при формировании значений корреляционной функции и ввод значений корреляции R(α,β) в процессор. В состав схемы управления входят триггер 75, схема "И" 76, счетчик 77, мультиплексор 78, диф. цепь 73, ОЗУ адреса эталона 80, регистр α,β 81 и сумматор 82.
По сигналу от дешифратора 52 в регистр 81 вводятся текущие координаты сдвига α,β, поступающие на информационный вход регистра по шине Д магистрали 1. Этим же сигналом взводится триггер 75, разрешающий прохождение тактовых импульсов Ф1, через схему "И" 76 на счетный вход счетчика 77. Код счетчика через мультиплексор 78 подается на адресный вход ОЗУ адреса эталона 80. С выхода ОЗУ значения координат точек эталона X и Y в режиме считывания подаются на адресные входы блоков памяти текущего изображения 3 непосредственно и эталонного изображения 4 через сумматор 82. На второй вход сумматора 82 подаются сигналы сдвига α,β от регистра 81. На схеме "И" 84 формируются сигналы записи текущей суммы модулей разности коррелятора (фиг. 5). По сигналу переноса P счетчика 77 после перебора всех координат элементов эталонной маски формируется сигнал окончания подсчета значения корреляционной функции R(α,β), который подается через ключ 83 на вход ХАСК процессора. Этим же сигналом через дифференцирующую цепь 79 сбрасывается триггер 75, запрещая выдачу сигналов записи Ф2 на коррелятор и работу счетчика 77.
Для обеспечения записи в ОЗУ адреса эталона 80 значений координат эталонной маски мультиплексор 78 по команде "режим" подключает на адресный вход ОЗУ 80 адресную шину процессора. Значения координат поступают от процессора 49 по шине данных Д и записываются с помощью сигналов "Запись ЭМ".
Ключ 60 (фиг. 60) обеспечивает адресацию памяти исходного изображения 7 от блока управления 11 в режиме считывания.
Для обеспечения взаимной связи блоков управления 6 и 11 используется шинный формирователь (ключ) 61, управляемый по сигналу от дешифратора адреса 52 и подключающий к процессору 49 магистраль 2.
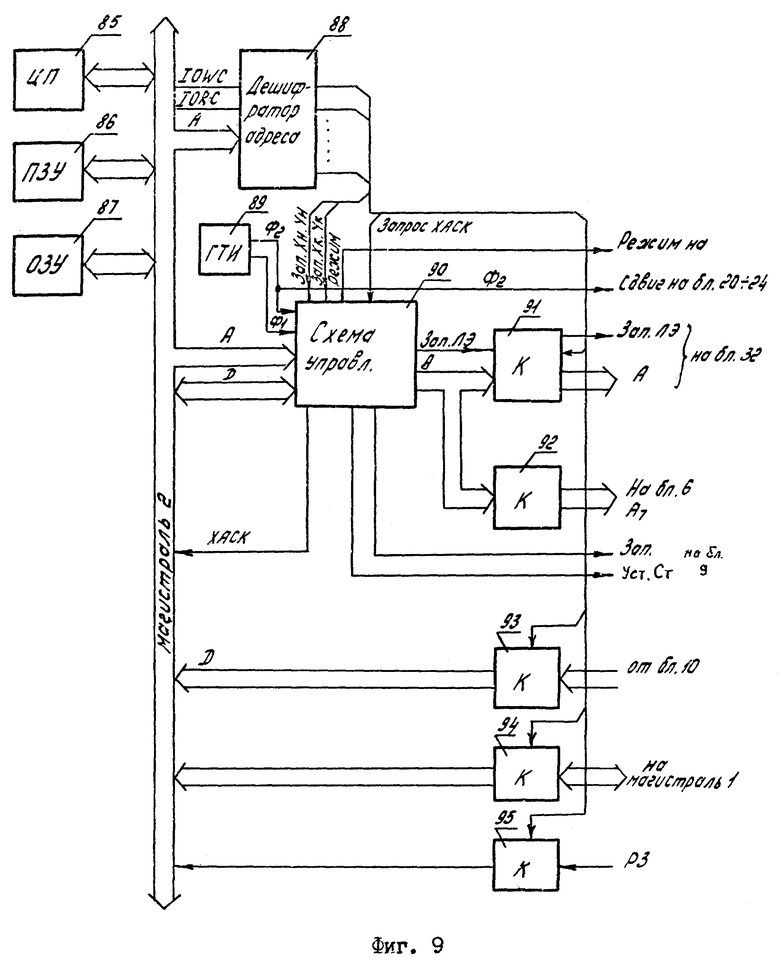
Структура блока 11 аналогична блоку 6. Блок 11 управляет режимом считывания памяти исходного изображения, выделения информативных элементов, формирования эталонной маски и записи в память адресов эталона. Кроме того, в блоке обеспечивается связь с процессором блока 6 или передачи значений адресов эталонной маски и команды разрешения захвата. В состав блока 11 входят центральный процессор 85, ПЗУ программ 86, ОЗУ 87, дешифратор адреса 88, генератор тактовых импульсов 89, схема управления 90, ключи 91, 92, 93, 94, 95.
Схема управления 90 представлена на фиг. 10. По сигналу дешифратора 88 производится запись начальных и конечных координат окна считывания в регистр 99, счетчики 100, 101 и регистры 104, 105. Импульсом записи конечных координат через схему "ИЛИ" 98 производится перезапись начальных координат Xн в счетчик 100 и взводится триггер 97, разрешающий прохождение тактовых импульсов в Ф1 через схему "И" 96 на счетчик 100. На выходе счетчиков 100, 101 формируются адресные сигналы, поступающие через ключи 91, 92 (фиг.9) на блок памяти исходного изображения 7 и ОЗУ локальных экстремумов 32 (фиг.4). Сигналы записи в ОЗУ локальных экстремумов формируются на схеме "И" 106. При достижении значения кода счетчика 100 координаты Xк схема сравнения 102 выдает импульс на счетчик 101, увеличивая его значение на единицу. Этим же импульсом через схему "И" 98 в счетчик 100 вновь перезаписывается начальная координата Xн. По окончании адресации всех точек изображения в окне, ограниченном координатами Xн, Yн и Xк, Yк, схема сравнения 103 выдает сигнал окончания считывания, который через ключ 107 поступает на процессор блока 11.
В состав блока управления 11 (фиг 9) входят также ключ 93, формирующий порт ввода значений эталонной маски от памяти 10, ключ 9, управляющий обменом между процессорами блоков 11 и 6, а также ключ 95, формирующий порт ввода команды "Разрешение захвата".
На фиг. 11 представлена блок-схема алгоритма оценки координат, реализуемого программой процессора 49, а на фиг. 12 - блок-схема алгоритма, реализуемого программой процессора 85. Работа алгоритма оценки координат начинается по включению питания ("Начало"), после чего производится установка начальных значений. После получения команды разрешения захвата (PЗ=1), транслируемой в процессор 49 от процессора 85, производится установка режимов записи текущего, эталонного и исходного изображений путем выдачи соответствующих команд через дешифратор 52 на ключи 56, 57, 58. На схему управления 54 выводятся координаты начала окна Xн, Yн и окончания окна Xк, Yк. Одновременно с выдачей координат окончания окна аппаратная обработки и запись изображений в память текущего, эталонного и исходных изображений условно представлена блоком "предобработка и запись изображений". Программа в этот период находится в режиме запроса конца записи, формируемого схемой управления в виде сигнала "ХАСК". После прихода сигнала "ХАСК" программа алгоритма оценки координат переходит в режим ожидания готовности эталонной маски ("Готовность ЭМ"), которая формируется под управлением программы процессора 85. После получения сигнала "Готовность ЭМ" от процессора 85 осуществляется ввод адресов эталона (эталонной маски) в локальное ОЗУ 51 процессора 49 и затем перезапись их в ОЗУ адреса эталона 80, расположенного в блоке управления 6. На этом процедура подготовки эталонной маски закончена, и программа производит запись очередного текущего изображения, для чего устанавливается режим "Зап. ТИ" (при этом запись в память ЭИ и ИИ не производится, в них сохраняются первоначальные записанные изображения). После выдачи начальных и конечных координат окна производится предобработка и запись градиентного изображения в память ТН. По окончании записи начинается процедура вычисления значений корреляции ТИ и ЭИ. Устанавливается начальное значение координат сдвига α = αo и β = βo, производится сброс в ⊘ счетчика адреса эталона 77 в схеме управления 55 и, одновременно с выдачей команды на запись α и β в регистр 81 запускается работа схемы 55. Работа коррелятора на схеме фиг. 11 условно отображена блоком "Формирование R(α,β) ". Окончание формирования значения R для заданных координат сдвига α,β фиксируется поступлением сигнала конца считывания (ХАСК) от схемы управления 55. Значение R(α,β) вводится в процессор 49 и запоминается в локальном ОЗУ 50. После установки новых координат сдвига α = α+1 для α ≤ αк или β = β+1 для α > αк аналогично производится подсчет значения R для этих координат сдвига. По окончании формирования всех значений R(α,β) по всему полю корреляции программа выполняет вычисление экстремума функции R(α,β), при этом координаты экстремума αμ, βμ фиксируются как координаты смещения ТИ по отношению к ЭИ. Новые координаты цели определяются как Xц= Xц+αμ, Yц= Yц+βμ и выводятся на следующую систему ("вывод Xц, Yц"). Далее в блок-схеме программы пунктиром выделен блок анализа ВКФ, который не является предметом изобретения, но, как правило, присутствует в большинстве реализаций устройств слежения и, в частности, представлен в прототипе. Его назначение - отслеживание степени ухудшения характеристик корреляционной функции в процессе слежения и выработка команды на перезапись эталона ПЭ. Если характеристики слежения на текущем кадре неудовлетворительны (ПЭ=1), то включается режим перезаписи эталона (Реж. зап. ЭИ), в противном случае эталон на следующем кадре остается неизменным. Одновременно от алгоритма подготовки эталонной маски запрашивается готовность ЭМ и в случае поступления сигнала "Готовность ЭМ" производит ввод новой эталонной маски от блока 11 и запись ее в ОЗУ. Таким образом, осуществляется модификация эталона, обеспечивающая адаптацию следящего устройства к изменению в сюжете.
Блок-схема алгоритма формирования эталонной маски представлена на фиг. 12. Работа алгоритма также начинается по включению питания, затем производится установка начальных значений и запрос команды разрешения захвата. После получения команды РЗ и вывода ее в блок 6 программа переходит в режим ожидания конца записи исходного изображения. По окончании записи производится установка режима локальных экстремумов с помощью дешифратора 88, вывод начальных Xн, Yн и конечных координат окна, при этом запускается схема управления 90, обеспечивающая управление формированием и записью локальных экстремумов в бл.32. По окончании записи ("Конец режима"), фиксируемого по поступлении сигнала "ХАСК" от бл.90, включается режим формирования эталонной маски ЭМ, производится сброс счетчика 42 в блоке формирования ЭМ и выдаются начальные и конечные координаты окна Xн, Yн, Xк, Yк. Одновременно запускается схема управления 90, формирующая адресные и управляющие сигналы для формирования и записи ЭМ в память 10. Эта процедура условно показана в виде блока "Формирование ЭМ". По поступлении сигнала "Готовность ЭМ" производится пересылка эталонной маски в блок 6, а программа перехода в режим ожидания конца записи нового исходного изображения для формирования очередной маски.
В зависимости от конкретной аппаратной реализации скорость выполнения процедуры может занимать от единиц до нескольких десятков кадров, тогда как программа алгоритма оценки координат обеспечивает обработку каждого ТВ кадра или даже каждого поля.
Узлы и элементы устройства в основном могут быть выполнены на микросхемах серий 533, 132, 556, 580, 1802, 1804, 1102 и уже упомянутых 1810.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИДЕОСОПРОВОЖДЕНИЯ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2716005C2 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| Устройство для определения положения объекта на изображении | 1988 |
|
SU1569853A2 |
| Телевизионное следящее устройство | 1988 |
|
SU1690217A1 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ТЕЛЕВИЗИОННОМУ ИЗОБРАЖЕНИЮ | 1999 |
|
RU2189701C2 |
| Устройство распознавания изображений | 1989 |
|
SU1674153A1 |
Изобретение относится к системам телевизионной автоматики, в частности к телевизионным следящим системам. Для повышения точности и надежности слежения за объектом производят предварительную обработку цифрового телевизионного видеосигнала от изображения объекта путем селекции в нем участков, соответствующих яркостным аномалиям в изображении объекта, выделяют в нем информативные элементы, формируют эталонную маску, при этом взаимно корреляционную функцию формируют по элементам, определяемым эталонной маской. Устройство слежения за объектом снабжено последовательно соединенными блоком подавления в цифровом телевизионном видеосигнале участков с однородной яркостью и подчеркивания в нем участков, соответствующих яркостным аномалиям в изображении объекта, блоком памяти исходного изображения, блоком выделения информативных элементов, блоком формирования эталонной маски, блоком памяти адресов эталона и блоком управления адресацией и записью эталона. 2 с. и 3 з. п. ф-лы, 12 ил.
| КОМОГОРОВ Г.С | |||
| и ДР | |||
| Оптоэлектронная система самонаведения THASSID | |||
| Зарубежная радиоэлектроника, 1987, N 10, с.57, 58 | |||
| JACKSON R | |||
| Target tracking using area correlation, Int Conf | |||
| on Advanced Iufrared Detectors and Systems, London, 29-30, Oct., 1981, p.124-130 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| US 4220967, 02.09.80 | |||
| US 4330099, 18.05.82. | |||
