Предлагаемое интегрирующее устройство может быть иснользовано ирн автоматизации технологических процессоВ различных произ1 одств, для которых требуется постоянная времени Ннтегрирования от нескольких минут до 10-15 час н достаточно высокая точность, для нелрерыоного автоматического контроля температур я внутреНН-их точек массивных тел, нагреваемых или охлаждаемых в иромышленных печах и других танлообменных устройствах на лреднриятиях металлургической, машиностроительной, химической промышленнасти, промышленности огнеупоров и др.
Известны устройства, содержащие син.хрои ih n двигатель, выходиой вал которого соедиие-н с контактными иолукольцаМИ, имеющим подвижную и неподвижную щетки, иоследовательио 110.аключенеые усилитель и реверсивный двигатель, вал которого соединен с нодвижной щеткой, переключателем и рамкой входного Иреобразователя, а также выходной двигатель, выход которого через редуктор связаи с рамкой выходного иреобразователя.
Предлагаемое устройство отличается от азвестных тем, что в него введены резистор л день №3 последоБательно соединенных конденсатора и диода, включенная между неподвижиой щеткой и .источником питания, причем падвижная щетка через резистор соединена с
обкладкой конденсатора, иодключеиной к
ДИОДУ.
Такое построение устройства позволяет иовысить трчность И надежность . Блок-схема устройства прпведе на и а чертеже.
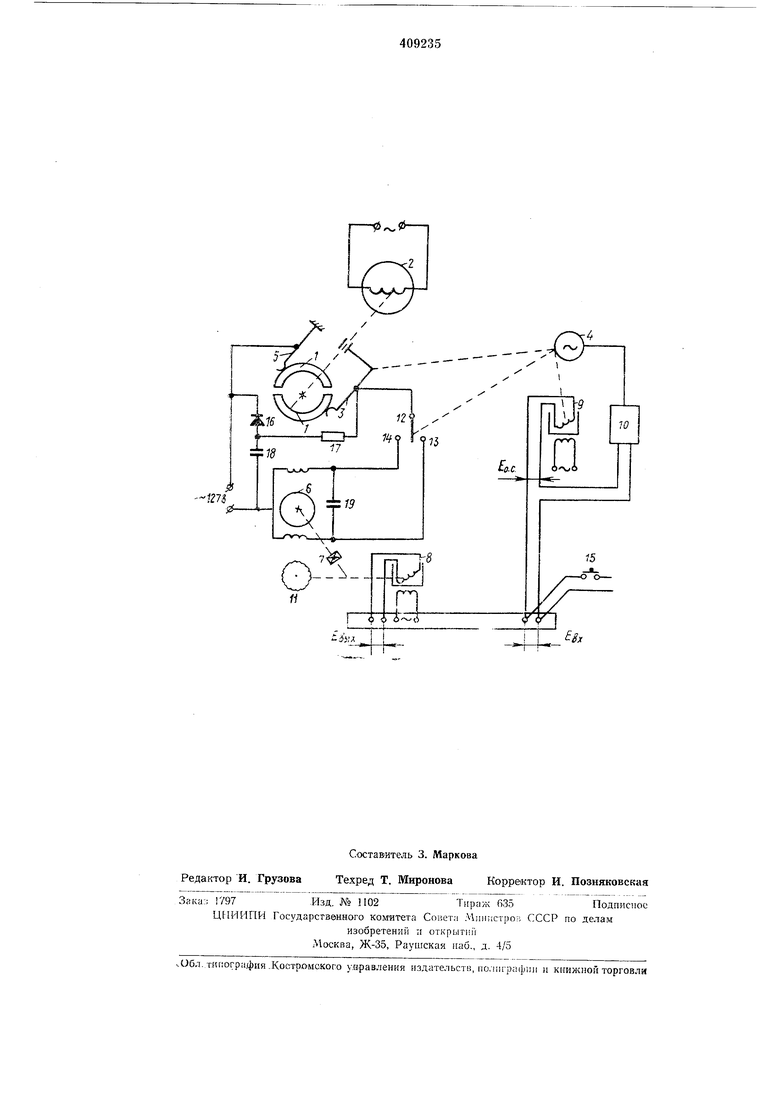
Устройство содержит диск / с изо.л иро-ваниыми друг от друга коитактами полукольцами, синхронный двигатель 2, иодвижный контакт
(щетку) 3, реверсивный двигатель 4 переменного тока, неподвижный контакт (щетку) 5, двухфазный двигатель 6 неременного тока, редуктор 7, выходной преобразователь 8, КОМиенсирующий преобразователь 9, электровньп
усилитель 10, рукоятку // ручной иерестановкн рамки преобразователя, иереключатель 12, контакты 13 .} 14, кнопку 15 контроля, диод 76, резистор 17, конденсаторы 18 и 19.
Устройство .работает следующим образом.
диск / с изолированными друг от друга контактны.ми нолукольца.ми ирлводится во вращение синхронным двигателем 2. Подвижный контакт 3 иеремещается реверсивным двигателем 4, поэтому расстояние
подвиж;ным 3 и неподвижным 5 контакта ми может изменяться. Если угол между контактами равен 180°, то цепь между контактами всегда разомкнута и выходной двигатель 6 интегратора не включается. При угле между коитактами менее 180° в течение каждого оборота
вала двигателя 2 о-ба контакта какое-то время находятся на одном полукольце. В это время цепь .питания двигателя 6 раЗОМК1нута и вал двигателя вращается, .перемещая через редуктор 7 рамку выходного преобразователя S. Чем меньше угол между контактами, тем с большей средней скоростью вращается вал двигателя 6.
Входной сигнал интегратора вх скомпенсирован сигналом обратной связи Ео-с- преобразозателя 9. Компенсационная схема внтегратора, состоящая из преобразователя 9, электронного усилителя 10 и реверсивного двигателя 4, уничтожает сигнал на входе усилителя (), перемещая рамку преобразователя и одновременНО передвигая подвижный контакт интагрирую щего элемента. Чем больше входной сигнал вх, тем на больший угол поворачивается рамка преобразователя и тем ближе расположены ко-нтакты 5 и 5. Это означает, что время включения двигателя 6 пропорционально входному сигналу. Таким образом, вал двигателя 6 вращается со средней скоростью, пропорциональной ., т. е.
dE
-ВЫХ/ /7
-.--.,л-,,
ИЛИ
вых(-т) вых(0) (T)rfT,
где )-Начальное значение выходного сигнала.
Величина ) может быть установлена рукояткой 11 ручиой перестановки, сочлененной с рамкой преобразователя 8.
В зависимости от знака (фазы) входного сигнала вз: вал Д1ви1гателя 6 МОжет .В|ра|щаться в равные стороны. Реверс о суЩеат1ВЛ(яется с помощью переключателя 12. Если , то рамка преобразователя 9 находится в нейтральном положении и переключатель 12 выключен. При {сигнал определенной фазы) рамка поворачивается в определенную сторону и Замыкает контакт 13 переключателя 12, двигатель 6 вращается iiio часовой стрелке и величина интеграла
К Jo Ьх (т) с/т
полол ительна,
При (сигнал противоположной фазы) .рамка поворачивается в другую сторону, замыкая контакт 14 переключателя 12, и вал двигателя 6 вращается против часовой стрелки; величина интеграла отрицательна.
В этом отношении реверсивный электромеханический интегратор имеет определенные преимущества по сравнению с нереверсивными интеграторами.
Так как питание на двигатель 6 поступает импульсами, то в момент отсутствия переменного напряжения на двигателе, на одну из его обмоток подается постоянное напряжение от конденсатора 18 через резистор 17. Это позволяет управлять выходным двигателем интегрирующего устройства с большой точностью.
Для установки электрического и механического «улей электромеханического интегратора служит кнопка 15 контроля, при нажатии которой закорачивается входная .цепь интегратора и рамка преобразователя 9 устанавливается в нейтральное положение. Переключатель 12 в это время должен быть разомкнут.
Бели интегратор продолжает интегрировать при замыкании кнопки, сектором рамки приводят интегратор в такое положение, когда угол между контактами 3 и5 равен 180° и двигатель 6 неподвижен.
Предмет изобретения
Интегрирующее устройство, содержашее синхронный двигатель, выходной вал которого соединен с контактными полукольцами, имеющими подвижную и неподвижную щетки, .последовательно включенные усилитель и реверсивный двигатель, вал которого соединен с подвижной щеткой, переключателем и входного преобразователя, а также выходной двигатель, выхо.д которого через редуктор связан с рамкой выходного преобразователя, отличающееся тем. что, с цатью повьушенил надеишости и точности работы, в .него введена цепь из последовательно соединенных диода и конденсатора, включен ная между неподвижной Н1,еткой и источником питания, а общая точка соединения конденсатора и диода через резистор иодключеиа к неподвижной щетке.
ff
4-kI0 01
rti
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИЗАТОР РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО | 1973 |
|
SU363262A1 |
| УСТРОЙСТВО ПОДАЧИ ГАЗА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2006646C1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU432529A1 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1976 |
|
SU612869A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ КОРРЕЛЯТОР | 1968 |
|
SU209083A1 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |
| Интегрирующий реверсивный привод | 1979 |
|
SU811287A1 |
| Устройство для измерения расхода | 1972 |
|
SU447559A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| УСТРОЙСТВО для САМОНАСТРОЙКИ ПАРАМЕТРОВ-- ^* | 1971 |
|
SU306447A1 |