1
Изобретение относится к станкостроению, нриборостроению и технике измерения длии и может быть нснользоваио в прецизнонны.х станка.х, ириборах н измернтельны.х машинах, в которых необходимо обеспечить точиое взаимное расноложенпе детали н инструмента для нз.мерення или обработки.
Известны машииы, в которых иеремещения рабочих органов разделены на грубые н точные. Грубые неремен1ення осуществляются но традицнон1Н м направляюнднм скольжения нли качения, а точиые - без внешнего трення с номондью уиругнх элементов, наиример, оисте.мы нлоскнх нружин, которые совместно с основанием образуют иружнииый иараллелограмм.
Однако нзвестные машины характеризуются иеремещеннем только в одном координатно.м направлении. При иеобходимости еоздаиия двух- нли трехкоординатного устройства с иснользованнем оиисанного ирннцина иеобходимо соответственно два или три иараллелограмма.
Пружинный параллелограмм является сборной конструкиней, поэтому трудно обеспечить в процессе сборки н юстировки высокую точность нространственной ,нн рабочего органа.
В нружннно.м параллелограмме поступательное перемеш,епне без разворотов -.можно
ocyaiecTBHTb только нри очень лгалон жесткости пружинных подвесок (плоских нружии), иесоизмерн.мой с жесткостью поступательно движущегося звена нараллелограмма. Пр 1мепенне нежестких плоских иружнн в качестве эле.ментов, несущих вес стола, нозволяет устанавлнвать на столе только небольшие по весу детали и ие допускает их переустановки. Кроме того, пружинная подвеска позволяет вести обработку деталей только нри небольшнх уснлиях.
При иостуиательном пере.мещении ДЕ|Ижущегося звена пружинного параллелограм.ма нмеется некоторая составляющая, направлен5ная перпендикулярно нанравлению неремещения в плоскости пружинного параллелограмма. Следовательно, нере.мещенне но одной коордпнате вызывает перемещенне по другой.
Цель изобретения - получить точные не0зависимые перемещения по трем взаимно пернендикулярным нанравле1 1ия.м.
Это достигается тем, что упрхгий деформпр е.мый элемеит выполнен в внде цельно|-о корпуса н содержнт центральную жесткую
5 часть с верхннм н нпжин.м жесткнмп поясами, средр ий жесткий пояс, отделенный от цент тальной частн замкнутым пазо.м н связанный с neii через .механнзмы мал)1х перемещени по двум паправлення.м; симметрично распо0ложенные упругие стержни одииаковых сечеНИИ, связывающие средний пояс с верхним н нижним поясами; и жесткий П-образиый элемент с плоскостью симметрии, проходящей через ось корпуса, связанный жестко со средним иоясом и через механизм малых перемещений по третьему направлению - с верхним поясом.
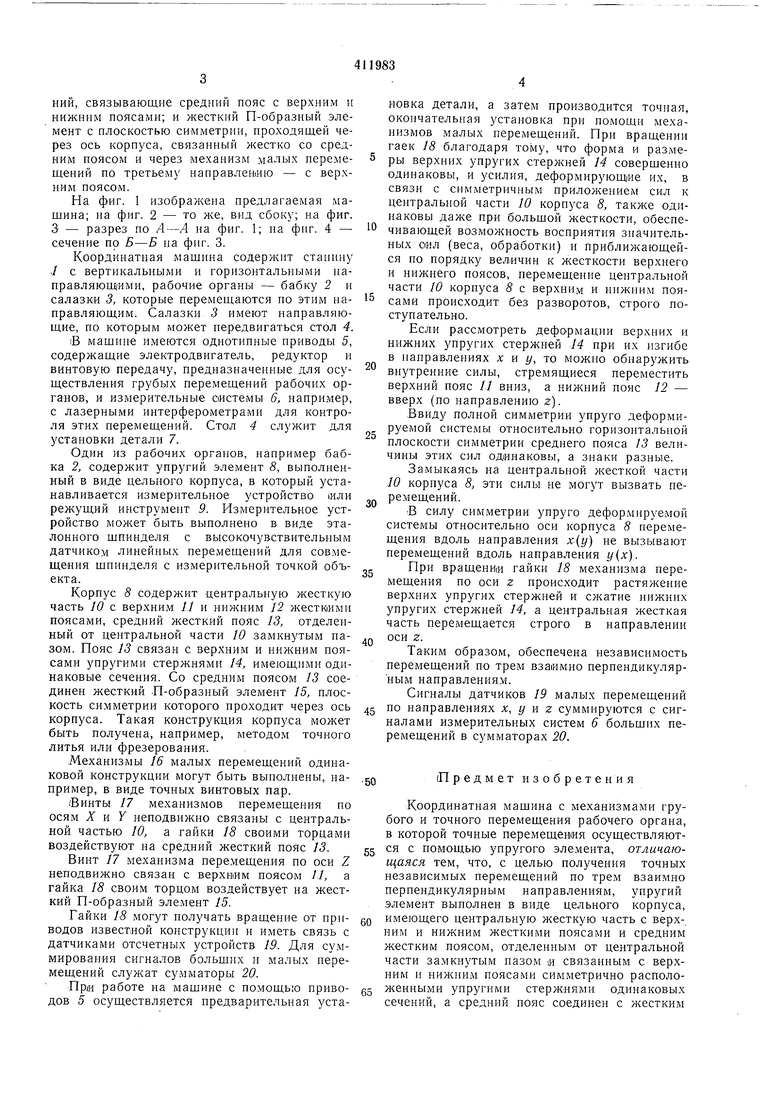
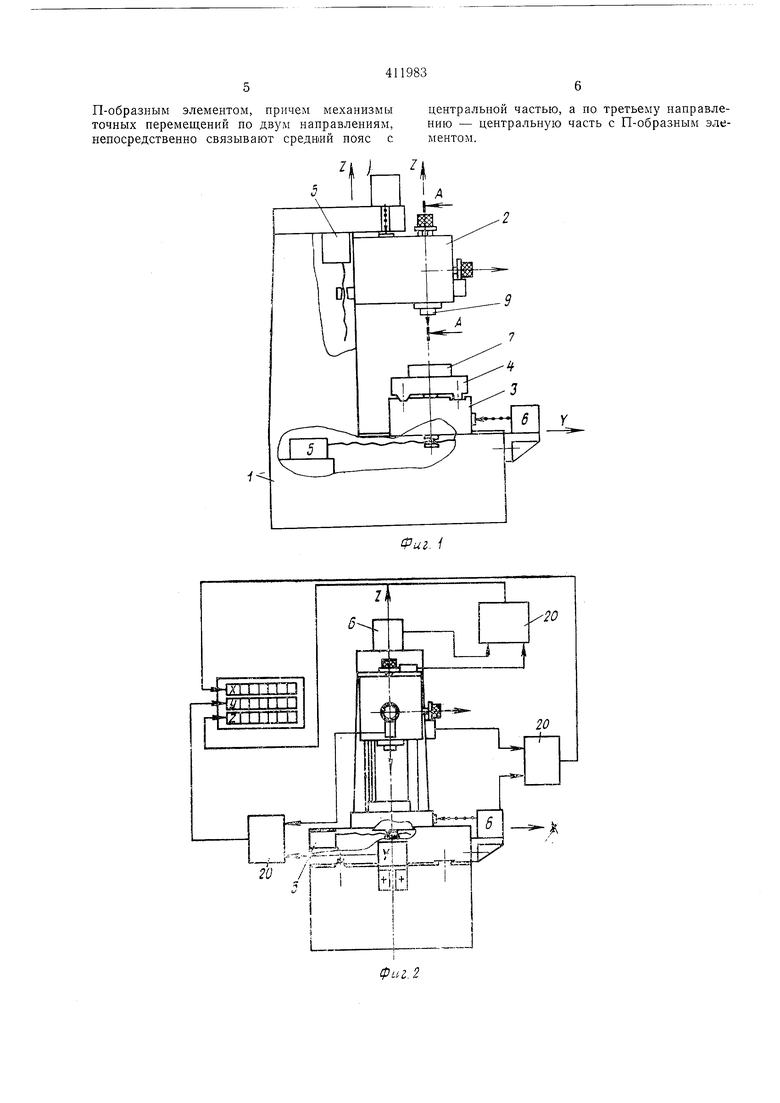
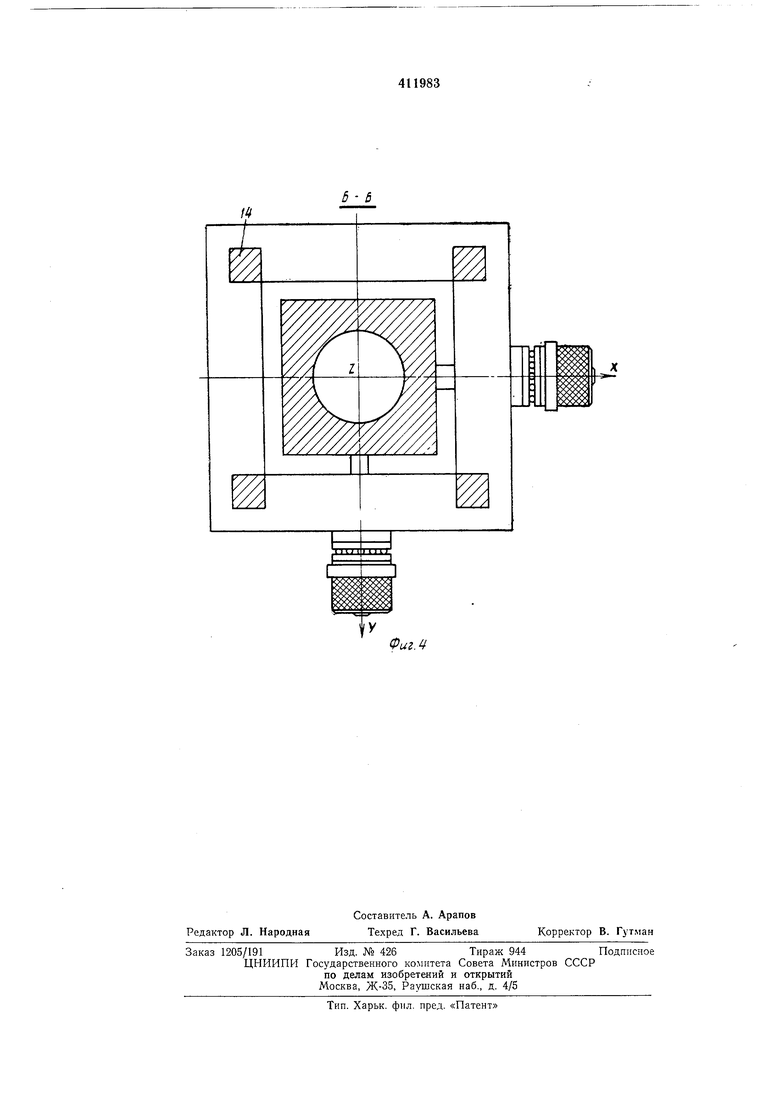
На фиг. 1 изображена предлагаемая мащина; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез по А-А на фиг. 1; на фиг. 4 - сечение по Б-Б на фиг. 3.
Координатная мащина содержит станину 7 с вертикальными и горизонтальными направляющими, рабочие органы - бабку 2 и салазки 3, которые перемещаются по этим направляющим. Салазки 3 имеют направляющие, по которым может передвигаться стол 4.
iB мащине имеются одиотипные приводы 5, содержащие электродвигатель, редуктор и винтовую передачу, предназначенные для осуществления грубых перемещений рабочих органов, и измерительные системы 6, например, с лазерными интерферометрамн для контроля этих перемещений. Стол 4 служит для установки детали 7.
Один из рабочих органов, например бабка 2, содержит упругий элемент 8, выполненный в виде цельного корпуса, в который устанавливается измерительное устройство 1или режущий инструмент 9. Измерительное устройство может быть выполнено в виде эталонного щпинделя с высокочувствительным датчиком линейных перемещений для совмещения щпинделя с измерительной точкой объекта.
Корпус 8 содержит -центральную жесткую часть 10 с верхним // и нижним 12 жестк1ими поясами, средний жесткий пояс 13, отделенный от центральной части 10 замкнутым пазом. Пояс 13 связан с верхним и нижним поясами упругими стержнями 14, имеющими одинаковые сечения. Со средним поясом 13 соединен жесткий П-образный элемент 15, плоскость симметрии которого проходит через ось корпуса. Такая конструкция корпуса может быть получена, например, методом точного литья или фрезерования.
Механизмы 16 малых перемещений одинаковой конструкции могут быть выполнены, например, в виде точных винтовых пар.
/Винты 17 механизмов перемещения по осям X н Y неподвижно связаны с центральной частью 10, а гайки 18 своими торцами воздействуют на средний жесткий пояс 13.
Винт 17 механизма перемещения по оси Z неподвижно связан с верхним поясом //, а гайка 18 своим торцом воздействует на жесткий П-образный элемент 15.
Гайки 18 могут получать вращение от приводов известной конструкции и иметь связь с датчиками отсчетных устройств 19. Для суммирования сигналов больщих н малых перемещений служат сумматоры 20.
При работе на машине с помощью приводов 5 осуществляется предварительная установка детали, а затем производится точная, окончательная установка при помощи механизмов малых перемещений. При вращении гаек 18 благодаря тому, что форма и размеры верхних упругих стержней 14 соверщенно одинаковы, и усилия, деформирующие их, в связи с симметричным приложением сил к центральной части 10 корпуса 8, также одинаковы даже при больщой жесткости, обеспечивающей возможность восприятия значительных сил (веса, обработки) и приближающейся но порядку величин к л есткости верхнего и нижнего поясов, перемещение центральной части 10 корпуса 8 с верхним и нижним поясами происходит без разворотов, строго поступательно.
Если рассмотреть деформации верхних и нижних упругих стержней 14 при их изгибе в иаиравлениях х и у, o можно обнаружить внутренние силы, стремящиеся переместить верхний пояс 11 вниз, а нижний пояс 12 - вверх (по направлению z).
Ввиду полной симметрии упруго деформируемой систе.мы относительно горизонтальной плоскости симметрии среднего пояса 13 величины этих сил одинаковы, а знаки разные.
Замыкаясь на центральной жесткой части 10 корпуса 8, эти силы не могут вызвать перемещений.
:В силу симметрии упруго деформируемой системы относительно оси корпуса 8 перемещения вдоль направления л:-(г/) не вызывают перемещений вдоль направления у(х).
При вращении гайки 18 механизма перемещения по оси z происходит растяжеиие верхних упругих стержней и сжатие нижних упругих стержней 14, а центральная жесткая часть перемещается строго в направлении оси Z.
Таким образом, обеспечена независимость перемещений по трем взаимно перпендикулярным направлениям.
Сигналы датчиков 19 малых перемещений по направлениях х, у и z суммируются с сигналами измерительных систем 6 больщих перемещений в сумматорах 20.
(Предмет изобретения
Координатная мащина с механизмами грубого и точного перемещения рабочего органа, в которой точные перемещения осуществляются с помощью упругого элемента, отличающаяся тем, что, с целью получения точных независимых перемещений по трем взаимно перпендикулярным направлениям, уиругий элемент выполнен в виде цельного корпуса, имеющего центральную жесткую часть с верхним и нижним жесткими поясами и средним жестким поясом, отделенным от центральной части замкнутым назом и связанным с верхним и нилсним поясами симметрично расположенными упругими стержнями одинаковых сечений, а средннй пояс соединен с жестким П-образным элементом, причем механизмы точных перемещении но двум нанравленням, непосредственно связывают средний пояс с центральной частью, а но третьему направлению - центральную часть с П-образным элементом
| название | год | авторы | номер документа |
|---|---|---|---|
| СИДЕНЬЕ ОПЕРАТОРА СТРОИТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2210510C1 |
| Автоматическая делительная машина | 1981 |
|
SU975330A1 |
| Координатный механизм | 1988 |
|
SU1737390A1 |
| Устройство для подачи воды к поливным машинам в движении | 1978 |
|
SU692596A1 |
| АВТОМАТИЧЕСКАЯ ДЕЛИТЕЛЬНАЯ Л1АШИНА ДЛЯ НАРЕЗАНИЯ | 1965 |
|
SU173427A1 |
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| Безрамная двухосная тележка локомотива | 1984 |
|
SU1167089A1 |
| НАСАДОК ДОЖДЕВАЛЬНОГО АГРЕГАТА | 2008 |
|
RU2385192C1 |
| СИСТЕМА ОПОР КУЗОВА НА ТЕЛЕЖКУ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2328396C1 |
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
9
18
иг.З
/«
Фиг.
