(54) ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь силы в электрический сигнал | 1976 |
|
SU661276A1 |
| Буксировочный динамометр | 1978 |
|
SU787914A1 |
| Датчик | 1978 |
|
SU794403A1 |
| Устройство для измерения перемещений | 1978 |
|
SU1002812A1 |
| Измерительный преобразовательКРуТящЕгО MOMEHTA гРЕбНОгО ВиНТА | 1979 |
|
SU845025A1 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1989 |
|
SU1633296A1 |
| Цифровой измеритель параметров катушек индуктивности и конденсаторов | 1975 |
|
SU599232A1 |
| Устройство для измерения крутящего момента и упора гребного винта | 1975 |
|
SU547658A1 |
| Устройство для измерения усилий и крутящего момента крыльчатых движителей | 1975 |
|
SU517816A1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
Изобретение относится к силоизмер тельной технике. По овновному авт. св. 661276 из вестен преобразователь силы в электр ческий сигнал, используемый в динамо метрических устройствах различного назначения, содержащее направляющий упругий параллелогра -, лувствительный упругий элемент с основанием, объединенным с направляющим упругим параллелограммом, гибкую перемычку, объединяк|щую подвижные жестокие части направлякмпего параллелограмма и чувствительного элемента, ходоувеличительный механизм рычажного типа с упругими шарнирными опорами рычага, в котором рычаг ходоувеличительного механизма соединен через трехзвенный упругий шарнир с г-хестким звеном чувствительного элемента и через двухзвенный шарнир - с основанием паралт лелограммов и индуктивный дифференциальный частотный преобразователь, осуидествляющий преобразование перемещения свободного конца рычага ходо увеличительного механизма в частоту следования импульсов электрического сигнала СП. Однако подобные преобразователи силы, использующие дифференциальные частотные преобразователи перемещения свободного конца рычага ходоувеличительного механизма, характеризуются достаточно высокой погрешностью линейности характеристики преобразования. Нелинейность характеристики ограничивает применение подобных преобразователей для решения задачи точного измерения в условиях сложного нагружения упругого элемента усилий, изменяющихся в широком диапазоне. Целью изобретения является линеаризация выходной характеристики в условиях сложного нагружения преобразователя . Это достигается тем, что преобразователь силы в электрический сигнал снабжен дополнительным лиЛЛеренциальным преобразователем перемещения свободного конца рычага ходоувеличительного механизма в электрический сигнал, цепью вычитания частот и делителем частоты, при этом один вход цепи вычитания частот через делитель частоты связан с выходом основного дифференциального преобра зователя перемещений, а другой вход непосредственно подключен к выходу дополнительного дифференциального преобразователя перемещений.
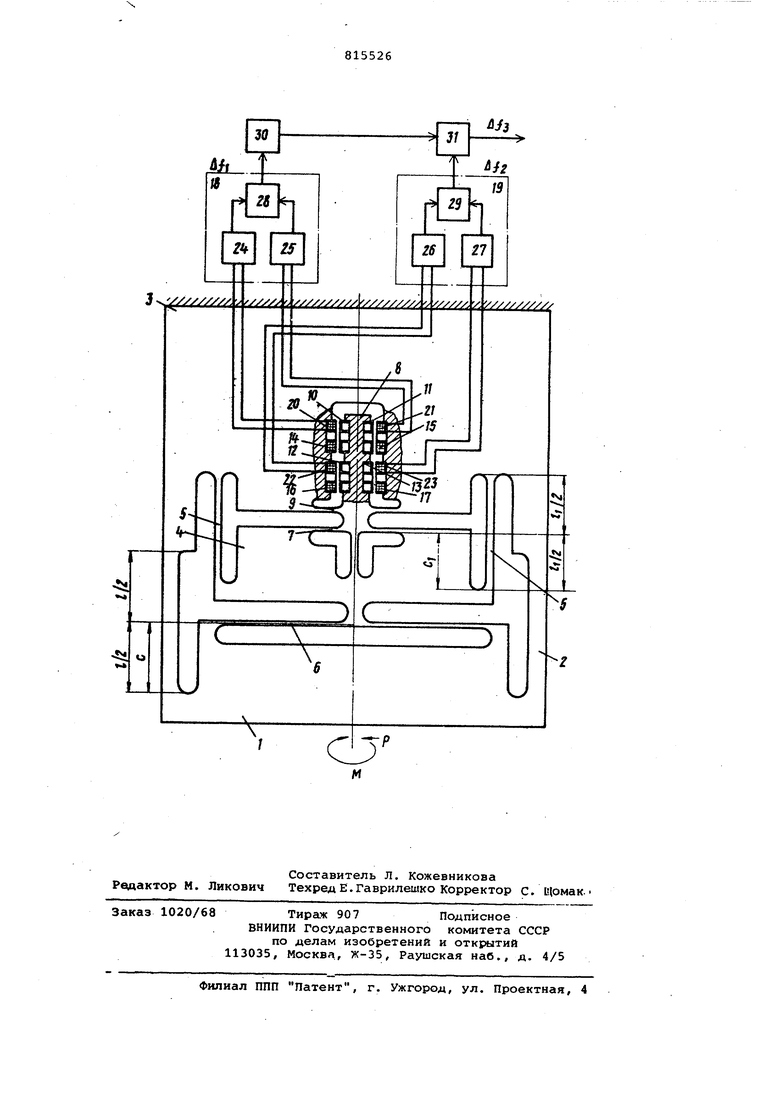
На чертеже схематически представлена конструкция и структурная схема электрических узлов предлагаемого измерительного преобразователя.
Он содер; ит направляющий параллелограмм, который состоит из подвижного жесткого звена 1, упругих балочек 2 и основания 3. Внутри направлякндего параллелограммасимметрично продольной оси расположен чувствительный элемент, выполненный в форм упругого параллелограмма, и состожчий из подвижного жесткого звена 4, упругих балочек 5 и общего с направляющим параллелограммом основания 3. Подвижные жесткие звенья направляющего параллелограмма и чувствительного элемента объединены гибкой перемычкой 6, размещают в поперечной плоскости симметрии упругих балочек направляющего параллелограмма на расстоянии С В/2. Жесткое звено чувствительного элемента -связано через трехэвенный упругий шарнир 7 с рычагом 8, который опирается через двухзвенный упругий шарнир 9 на основание параллелограммов, образуя, таким образом, Ходоувеличительный механизм При этом, центр поворота трехзвенноге шарнира с точкой пересечения продольной и поперечной осей симметрии чувствительного элемента. На свободном конце рычага закреплены подвижные части (якори) 10, 11 и 12 13 магнитных систем катушек 14, 15 и 16, 17 индуктивностей соответственно основного 18 (10, 11, 14 15) и дополнительного 19 дифференциальнЕлх преобразователей. Неподвижные части (сердечники) 20, 21 я 22, 23 магнитных систем вместе с катушками 14, 15 и 16, 17 индуктивностей размещены на основании 3 параллелограммов. Катушки 14, 15 индуктивности включены в контуры управляемых генераторов 24, 25 дифференциального преобразователя 18, а катушки 16, 17 - в контуры генераторов 26, 27 преобразователи 19. Выходы генераторов в каждом дифференциальном преобразователе 18, 19 подключены ко входам смесителей Фильтрами 28 и 29 нижних частот соответственно. Выход, дифференциального преобразователя 18 через делитель 30 частоты связан с одним из входов цепи 31 вычитания частот, другой вход которой соединен с выходом дифференциального преобразователя 19.
Устройство работает следуквдим об разом.
Измеряемая сила Р, приложенная к жесткому звену 1 направляющего параллелограмма, передается через пере|«ичку 6 на жесткие звено 4 чувствительного элемента и далее через трехзвенный шарнир 7 на рычаг 8 ходоувеличительного механизма. В результате деформаций изгиба л Y балочек 2 и 5 направляющего параллелограмма и чувствительного элемента, а также упругих звеньев шарниров 7 и 9, свободный конец рычага 8 смещается относительно основания 3. При этом одновременно с ним с учетом отношений плечей рычага 8 будут перемещаться соответственно якори 10, 11 и 12, 13 относительно сердечников катушек 14, 15 и 16, 17 индуктивности, причем перемещение Д Xj Щ Д якорей 10, 11 диФЛеренциального преобразователя 13 определяется коэффициентом передачи т,/ рычага 8, а перемещение ДУ, т,.. д Y якорей 12, 13 дифференциального преобразователя 19 определяется коэффициентом передачи ш. и т , т„ 1
В каждом дифференциальном индуктивном частотном преобразователе, например 19 зазор в магнитной системе одной катушки (15) уменьшается, а в другой катушке (14) - увеличивается. Это в свою очередь, приводит к изменению частот управляемых генераторов 24...27.
Выходные напряжения генераторов, включенных дифференциально, например 24, 25, поступают на входы смесителей с фильтрами 28 или 29 нижних частот, на выходе которых выделяются сигналы разностных частот д f (на выходе дифференциального преобразователя 13) и Afij (на выходе преобразователя 19), соответствующие им выражения в общем виде записываются
,v(°,N% ;, . (1) ()/ (2
где fjy , food начальные частоты дифференциальных преобразователей 21 22 при х x,j О;
х, хд - относительные перемещения якорей 10, 11 и 12, 13, катушек 14, 15 и 16, 17 индуктивности; х дУ, /YCX ; х А a/Yo, , где YOJ YOU - начальные зазоры магнитнцх систем катушек 14, 15 и 16, 17, а для равных начальных зазоров Y YOQ YO
AY
n . 2 Y
Вводя в общем случае единичное отноAY/Y.,, изсительное перемещение х
мерительного преобразователя силы и постоянный коэффициент т (Yea/Yp) -jl , получим х т X, ж. - (mg/mj) ,х
Разностная частота Af с выхода дифференциального преобразователя 18 после деления на коэффициент п дискретным делителем 30 поступает на вход цепи 31 вычитания частот и смешивается с выходной частотой д i дифференциального преобразователя 19, На выходе цепи 31 выделяется разность
частот Afj , являющаяся инАо|рмативным параметром измерительного преовразовэтеля силы, которая по линиям связи передается к цифровому частотомеру или вводится в соответствунхпий канал ИИС.
Выражение для частоты д f, записывается в виде
V f2-4/ r(WW«}
VSj-2-т Ч-.
| llls-ba. i.) ()
- -хVoa 2in и ot
.
При выполнении условия
за счет выбора соответствующего коэЛ ициента деления п дискретного делителя 30 частоты (грубо) и варьирования, например, начальной частоты fpoi (более точно), выражение (5) не будет содержать кубичного члена разложения в степенной ряд характеристики преобразователя, и частота д f оказывается пропорциональной измеряемому усилию с высокой степенью.точ- ности:
AV(W- HwS;° a- ,- (5)
Использование частоты д f в качестве выходного информативного параметра измерительного преобразователя
силы позволяет при заданной погрешности линейности значительно расширить рабочий диапазон измеряемых сил и снизить приведенную погрешность от нестабильности начальных частот генераторов, а при наличии помехи позволяет исключить смещение среднего значения измеряемой силы.
Формула изобретения .
Измерительный преобразователь силы в электрический сигнал по авт. св. t; 661276, отличающийся тем, что, с целью линеаризации выходной характеристики в условиях сложного нагружения преобразователя, он снабжен дополнительным дифференциальным преобразователем перемещения свободного конца рычага ходоувеличительного механизма в злектрический сигнал, цепью вычитания частот и делителем частоты, при этом один конец цепи вычитания частот через делитель частоты связан с выходом основного диАЛеренциального преобразователя перемещений, а другой вход непосредственно подключен к выходу дополнительного ифференциального преобразователя перемещений. .
Источники информации, принятые во внимание при зкспертизе
1 J3
