Как известно из теории корабельной Девиации радиопеленгатора, одной из главных причин девиации является вторичное излучение, создаваемое корпусом корабля, каковое, накладываясь на поле проходящей волны, в значительной степени его искажает. С некоторым приближением действие корпуса корабля можно уподобить действию некоторой эквивалентной рамки, расположенной в диаметральной плоскости корабля. Основываясь на этом положении, в течение уже ряда лет применяют способ компенсации четвертной (квадратной) девиации при помощи специальной неподвижной компенсирующей рамки. Обычно в качестве сторон этой компенсирующей рамки используют металлические палубные надстройки, которые вместе с корпусом корабля образуют три стороны рамки. Четвертая сторона образуется проводом, протягиваемым между упомянутыми надстройками (например, между трубой и мачтой). Компенсационная рамка может иметь также форму треугольника.
Включая в цепь компенсационной рамки комплексное сопротивление и влияя таким образом на амплитуду и фазу силы тока в рамке, удается в значительной степени уменьщить девиацию.
(415)
Предлагаемый способ уничтожения девиации пригоден для корабельных пеленгаторов с двумя неподвижными рамками и гониометром (система Беллини-Този). Уничтожение девиации производится при помощи специальной добавочной катущки, накладываемой поверх полевых катущек гониометра.
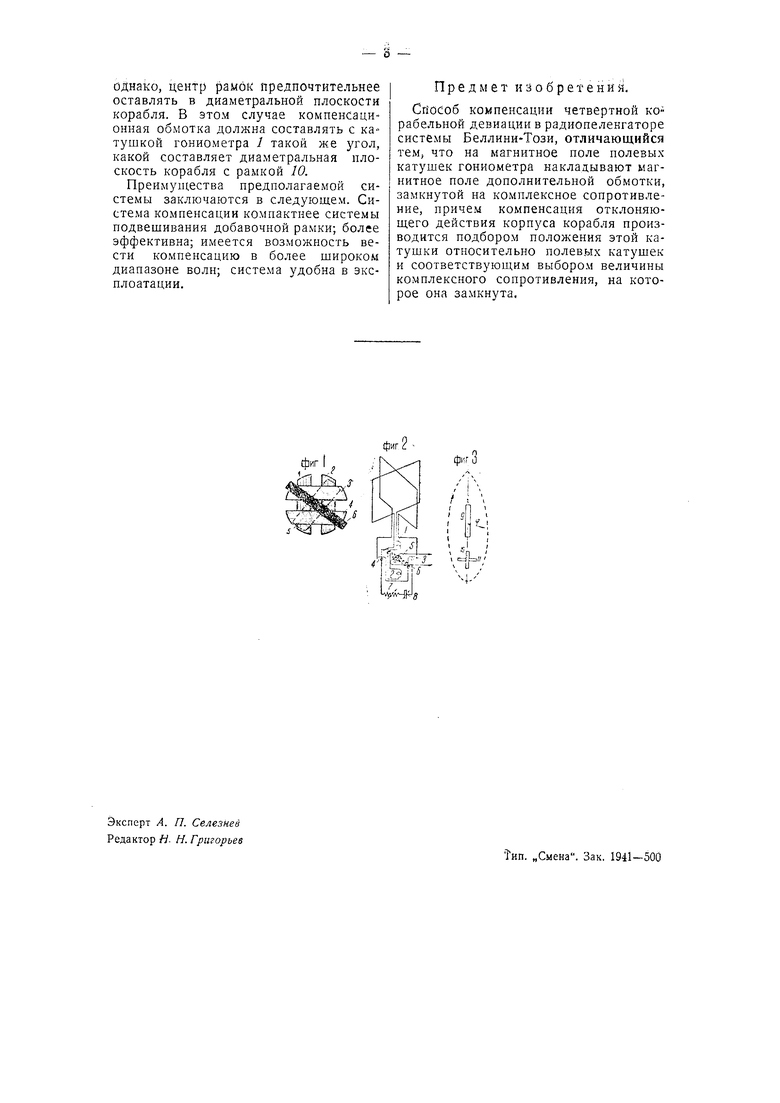
На чертеже фиг. 1 изобран ает схему расположения рамок гониометра; фиг. 2 - электрическую схему гониометра; фиг. 3 - расположение гониометра на карабле.
1, 2, 3, VI 4, - две пары неподвижных (полевых) катущек, 5 -вращающаяся между ними искательная катущка, 6- добавочная неподвижная компенсационная обмотка, накладываемая поверх полевых катущек. Практически добавочную обмотку удобнее сделать вращающейся вокруг оси гониометра, но могущей быть закрепленной в любом положении. Концы компенсационной обмотки присоединяют к последовательно соединенным емкости 8 и сопротивлению 7 (фиг. 2). Подбирая величины емкости 8 и сопротивления 7 и вращая добавочную обмотку, можно добиться того, чтобы магнитное поле, создаваемое этой обмоткой (ток в компенсационной обмотке будет, в свою
очередь, наводиться магнитными полями полевых катушек), компенсировало как по величине, так и по фазе отклоняющее действие массы корабля. Изготовление вращающейся компенсационной обмотки, как составной части гониометра, позволит производить уничтожение девиации в самых разнообразных условиях. Преимущество описанной системы по сравнению с другими системами компенсации заключается также в том, что, подбирая нужным образом сопротивление 7, можно компенсировать девиацию в более широком диапазоне волн, а имено в тех участках диапазона, где уже начинает сказываться зависимость девиации от длины волны. Доказательство того, что предлагаемый снособ пригоден для уничтожения девиации дается ниже.
Уже указывалось, что отклоняющее действие металлической массы корабля эквивалентно действию некоторой вертикальной рамки, расположенной в диаметральной плоскости корабля. Так как антенна пеленгатора является системой линейной, то, применяя принцип суперпозиции, отклоняющее действие корпуса корабля можно учесть, как некоторое паразитное излучение интенсивности cos о где К-коэфициент пронорциопальности, зависящий от местных условий, Е-напряженность приходящего электрического ноля, -угол, составленный направлением приходящих волн с диаметральной плоскостью корабля. Так как источником этого паразитного излучения в данном случае является эквивалентная рамка, то независимо от направления ПРИХОДЯЩИХ волн, направление паразитного излучения остается неизменным. С другой стороны, Э.Д.С., наводимая в добавочной облютке, также пропорциональна cosf, где ср-угол между направлением приходящих волн и добавочной катушки гониометра. Это следует из того, что добавочную обмотку можно рассматривать, как искательную катушку, застопоренную в некотором ноложении.
Допустим далее, что центр наружной системы Беллини-Този расположен в диаметральной плоскости корабля и предположим для простоты рассуждений, что рамка распо.ч6жена тоже в диаметральной плоскости корабля. I Такой случай располол епия пеленгатора представлен на фиг. 3.
Расположив компенсационную обмотку параллельно обмотке гониометра, можно уничтожить четвертную девиаГ1ИЮ. Действите.яьно, при таком расположении пеленгатора эквивалентная рама 9 может индуктировать э.д.с. только врамI ке 10 (ибо рамка // перпендикулярна I к эквивалентной рамке), и только в катушках 1 гониометра может наводить э.д.с. компенсационная обмотка. Если направление приходящих волн совпадает с диаметральной плоскостью корабля, то эквивалентная рамка 9 и компенсационная обмотка, каждая в отдельности, создает некоторую добавочную э.д.с. в катушках /, 2 гониометра, что на положении искательной катушки не отразится (ибо искательная катушка при этом расположена перпендикулярно к катушкам /, 2).
При направлении приходящих волн по траверзу корабля, ни в эквивалентной рамке, ни в компенсационной обмотке э.д.с. наводиться не будет (как известно, при таком направлении приходящих волн вообще не будет девиации). Если же направление приходящих волн составляет угол с диаметральной плоскостью корабля, то возмущающее действие корпуса корабля будет пропорционально /С cosf. Так как компенсационная обмотка составляет с направлением приходящих волн тот же угол (f, то, как это было показано выше, наводимая в ней э.д.с. также пропорциональна cos 9. Для осуществления компенсации остается подобрать сопротивление Z, коитура 6, 7 такой величины, чтобы магнитное поле компенсационной обмотки по величине было равно, а по фазе отличалось на 180° от возмущающего магнитнего поля. Выполнить последнее условие всегда можно, ибо, меняя сопротивление Z, можно изменять фазу тока в компенсационной обмотке в пределах от минус до плюс 180°.
Аналогичными рассуждениями можно показать, что компенсация девиации осуществима при любом расположении рамок гониометра относительно диаметральной плоскости корабля; при этом,
однако, центр рамок предпочтительнее оставлять в диаметральной плоскости корабля. В этом случае компенсационная обмотка должна составлять с катушкой гониометра / такой же угол, какой составляет диаметральная плоскость корабля с рамкой 10.
Преимущества предполагаемой системы заключаются в следующем. Система компенсации компактнее системы подвешивания добавочной рамки; более эффективна; имеется возможность вести компенсацию в более широком диапазоне волн; система удобна в эксплоатации.
Предмет изобретения.
Снособ компенсации четвертной корабельной девиации в радиопеленгаторе системы Беллини-Този, отличающийся тем, что на магнитное поле полевых катушек гониометра накладывают магнитное поле дополнительной обмотки, замкнутой на комплексное сопротивление, причем компенсация отклоняюш,его действия корпуса корабля производится подбором положения этой катушки относительно полевых катушек и соответствующим выбором величины комплексного сопротивления, на которое она замкнута.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гониометр | 1938 |
|
SU87380A1 |
| Приспособление к гониометру для устранения октакальных ошибок | 1938 |
|
SU87906A1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| ИМИТАТОР СИГНАЛОВ РАДИОМАЯКА ДЛЯ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ РАДИОПЕЛЕНГАТОРА | 1990 |
|
RU2018857C1 |
| ПЕЛЕНГАТОР | 1940 |
|
SU60474A1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| Устройство для ориентированного радиоприема | 1924 |
|
SU1567A1 |
| Электрический компаратор | 1960 |
|
SU140895A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
ф|Г О
I о
f I I I )
n
1 с(
u .

