Изобретение относится к области навигационного приборостроения и предназначено для уничтожения полукруговой девиации магнитных компасов.
В общепринятой теории и практике выполнения девиационных работ для магнитных компасов уничтожение полукруговой девиации заключается в выполнении строго последовательных обязательных операций, обеспечивающих поэтапную компенсацию магнитами компенсатора полукруговой девиации паразитных магнитных полей, обуславливающих девиацию - погрешность курсоуказания компаса.
Известен способ определения полукруговой девиации по а.с. №1434258, МКИ4 G01C 17/38 (публикация от 30.10.88 г. №40).
Способ включает в себя следующую последовательность операций:
Измеряют составляющие магнитного поля на оси системы прямоугольных координат, связанной с транспортным средством. Осуществляют разворот транспортного средства на угол, при котором результаты измерений проекций магнитного поля на первую ось координат одинаковы, а на вторую - различные. Определяют коэффициент полукруговой девиации как полусумму результатов измерений проекций на вторую ось до и после разворота. Разворачивают транспортное средство на угол, при котором результаты измерений проекций магнитного поля на вторую ось одинаковы, а на первую - различны. Определяют коэффициент полукруговой девиации как полусумму результатов измерений проекций на первую ось.
Основными недостатками способа определения полукруговой девиации по а.с. №1434258 являются:
1. Необходимость поворота транспортного средства.
2. Способ не предусматривает уничтожения полукруговой девиации.
Известен также способ определения мешающих полей в транспортных средствах с электронным компасом, описанный в патенте ФРГ №3345818, МКИ G01С 17/28.
Способ отличается тем, что автомобиль поворачивается, по меньшей мере, на 180° вокруг вертикальной оси. В двух положениях автомобиля, отличающихся одно от другого на 180°, определяются величина и направление постоянного поля. По этим величинам определяются величина и направление мешающего поля.
Способ используется для калибровки электронных компасов.
Основным недостатком способа определения мешающих полей по патенту ФРГ №3345818 являются:
1. Необходимость поворота транспортного средства (автомобиля).
2. Способ предусматривает не уничтожение девиации, а учет девиации.
При больших значениях девиации ее учет, а не уничтожение, может привести к полной утрате работоспособности компаса на отдельных курсах вследствие подавления магнитного поля Земли полем автомобиля.
Наиболее близким по технической сущности к предлагаемому изобретению является способ приближенного уничтожения полукруговой девиации на одном магнитном курсе, описанный в книге «Девиация магнитного компаса» В.П.Кожухов, В.В.Воронов, В.В.Григорьев «Морской транспорт», Л., 1960 г., стр.140-150 (прототип).
Способ содержит следующую последовательность операций:
1. Измерение на берегу с использованием дефлектора горизонтальной составляющей H напряженности (индукции) Земного магнитного поля (см. там же стр.84-93), выбор из компасного журнала величины коэффициента λ - коэффициента экранирования горизонтальной составляющей индукции магнитного поля Земли элементами конструкции судна в области магнитного чувствительного элемента компаса; вычисление силы λH.
2. Выбор из компасного журнала значения коэффициента четвертной девиации D, выбор по D и магнитному курсу К из девиационных таблиц величины четвертной девиации δ0 и отношения равнодействующей силы H'о к силе λН
вычисление величины H'о по формуле

и компасного курса по формуле

3. Вычисление проекций (X'о и Y'o) равнодействующей силы Н'о, направленных по судовым координатным осям Х и Y, по формулам
4. Установку пеленгатора в направлении большей из проекций по п.3; установку на чашку пеленгатора дефлектора без вспомогательного магнита при совмещении оси измерительного магнита с визирной плоскостью и направление его северного полюса в направлении большей проекции; установку измерительного магнита дефлектора на отсчет, равный большей проекции по шкале горизонтальных сил; подведение с помощью магнитов-уничтожителей, параллельных направлению этой проекции, под призму пеленгатора ближайшего из отсчетов 90° или 270° картушки-шкалы магнитного чувствительного элемента.
5. Установку пеленгатора в направлении второй проекции; размещение на компасе дефлектора так, чтобы ось его измерительного магнита находилась в визирной плоскости, а его северный полюс был обращен в ту сторону, куда направлена проекция; установку магнита дефлектора на отсчет, равный второй проекции, и подведение с помощью магнитов-уничтожителей (перпендикулярных первым по п.4) под призму пеленгатора ближайшего из отсчетов 270° или 90° картушки.
Основными недостатками способа приближенного уничтожения полукруговой девиации на одном курсе - прототипа является отсутствие возможности использования способа уничтожения девиации для серийно изготавливаемых ОАО «Штурманские приборы» (г.Санкт-Петербург) магнитных компасов типа КМ115-01, КМ115-02 и КМ115-03, соответственно КОРН.462512.002, КОРН.462512.003 и КОРН.462512.004, КМ115-04 КОРН.462512.005 в связи с тем, что конструкция пеленгатора компасов исключает возможность установки дефлектора для измерения напряженности (индукции) компонент суммарного магнитного поля Земли и корабля (судна).
Известны устройства, используемые для измерения напряженности (индукции) магнитного поля, - магнитометры.
Известен магнитометр МФ-23ИМ, изготавливаемый предприятием ELITE, Медлаб ООО. Магнитометр содержит однокомпонентный датчик, соединительный кабель, блок электроники, автономный источник питания (технический паспорт магнитометра).
Основным недостатком магнитометра является отсутствие в его составе средства для размещения однокомпонентного датчика в нактоузе магнитного компаса, что исключает возможность его использования для измерения компонент индукции суммарного магнитного поля Земли и корабля (судна).
Известен также магнитометр НВ 0599В, изготавливаемый предприятием НПО ЭНТ ООО, г.Санкт-Петербург. Магнитометр содержит однокомпонентный датчик, соединительный кабель, блок электроники, автономный источник питания (технический паспорт магнитометра).
Основным недостатком магнитометра является отсутствие в его составе средства для размещения датчика в нактоузе магнитного компаса, что исключает возможность его использования для измерения компонент индукции суммарного магнитного поля Земли и корабля (судна).
Наиболее близким по технической сущности является однокомпонентный магнитометр МЦКФМ МаС.С МФ-03-М, изготавливаемый ИЗМИРАН, г.Санкт-Петербург, Препринт №14 (1064), 1994 г. (2001 г.), ИЗМИРАН - прототип.
Магнитометр содержит однокомпонентный датчик, размещенный в корпусе с гнездом для датчика, соединительный кабель, блок электроники с источником автономного питания, крепежную струбцину, крепежный разборный штырь.
При эксплуатации магнитометра датчик, размещенный в корпусе, закрепляется на крепежном штыре, который прикрепляется к струбцине, закрепляемой на краю стола.
Недостатком магнитометра - прототипа является невозможность его использования в нактоузе магнитного компаса, в связи с отсутствием в составе нактоуза конструктивных узлов, позволяющих произвести установку и крепеж струбцины с обязательным обеспечением при этом положения датчика магнитометра на уровне расположения магнитного чувствительного элемента компаса в штатном котелке магнитного компаса, при его размещении в нактоузе.
Основными задачами, на решение которых направлено предлагаемое изобретение, является:
обеспечение возможности уничтожения полукруговой девиации магнитного компаса без использования дефлектора,
уменьшение погрешности уничтожения полукруговой девиации за счет уменьшения погрешности измерения индукции магнитного поля,
уменьшение затрат времени, расходуемого на уничтожение девиации, за счет сокращения времени измерений индукции магнитного поля.
Для решения указанных задач:
1. В известном способе уничтожения полукруговой девиации на одном магнитном курсе, включающем определение коэффициента λ экранирования горизонтальной составляющей индукции магнитного поля Земли элементами конструкции корабля (судна) в области магнитного чувствительного элемента компаса, измерение на берегу горизонтальной составляющей H индукции Земного магнитного поля, вычисление силы λH, определение магнитного курса K корабля (судна), уничтожение полукруговой девиации магнитами компенсатора полукруговой девиации компаса с помощью держателя датчика магнитометра,
демонтируют котелок компаса со штатного места в нактоузе компаса,
устанавливают (опорами) на штатное место котелка держатель датчика магнитометра,
размещают датчик магнитометра в гнезде корпуса держателя, ось симметрии которого совпадает с вертикальной плоскостью, проходящей через центры симметрии опор держателя,
измеряют магнитометром значение первой компоненты горизонтальной составляющей индукции суммарного магнитного поля Земли и корабля (судна),
изменяют измеренное значение первой компоненты индукции суммарного магнитного поля перемещением магнитов штатного компенсатора полукруговой девиации компаса, компенсирующих продольную составляющую индукции магнитного поля корабля (судна), до значения λH cosK,
размещают датчик магнитометра в гнезде корпуса держателя датчика магнитометра, ось симметрии которого совпадает с вертикальной плоскостью, перпендикулярной вертикальной плоскости, проходящей через центры опор держателя,
измеряют магнитометром значение второй компоненты индукции суммарного магнитного поля Земли и корабля (судна),
изменяют измеренное значение второй компоненты индукции суммарного магнитного поля перемещением магнитов штатного компенсатора полукруговой девиации компаса, компенсирующих поперечную составляющую магнитного поля корабля (судна) до значения - λH cosK.
2. Держатель датчика магнитометра, содержащий корпус с гнездом для датчика, опору для установки корпуса с датчиком, опора держателя выполнена в виде подшипников, обеспечивающих установку датчика в нактоуз магнитного компаса на место демонтированного штатного котелка компаса, держатель снабжен грузом, обеспечивающим горизонтирование датчика магнитометра в нактоузе компаса, при этом положение продольной оси симметрии датчика совпадает с горизонтальной плоскостью размещения центра симметрии магнитной системы магнитного чувствительного элемента штатного котелка компаса в нактоузе, а центр симметрии датчика совпадает с положением центра симметрии магнитной системы чувствительного элемента штатного котелка компаса в нактоузе.
Предлагаемый держатель датчика магнитометра представлен на фиг.1-5.
На фиг.1 представлен общий вид держателя датчика магнитометра.
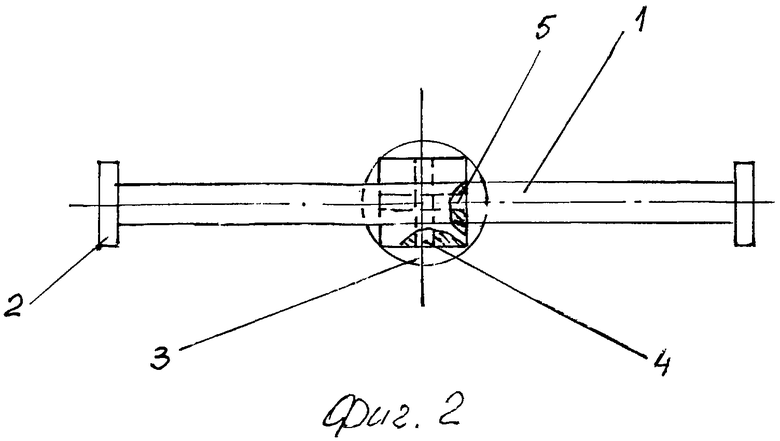
На фиг.2 представлен держатель датчика магнитометра, вид сверху.
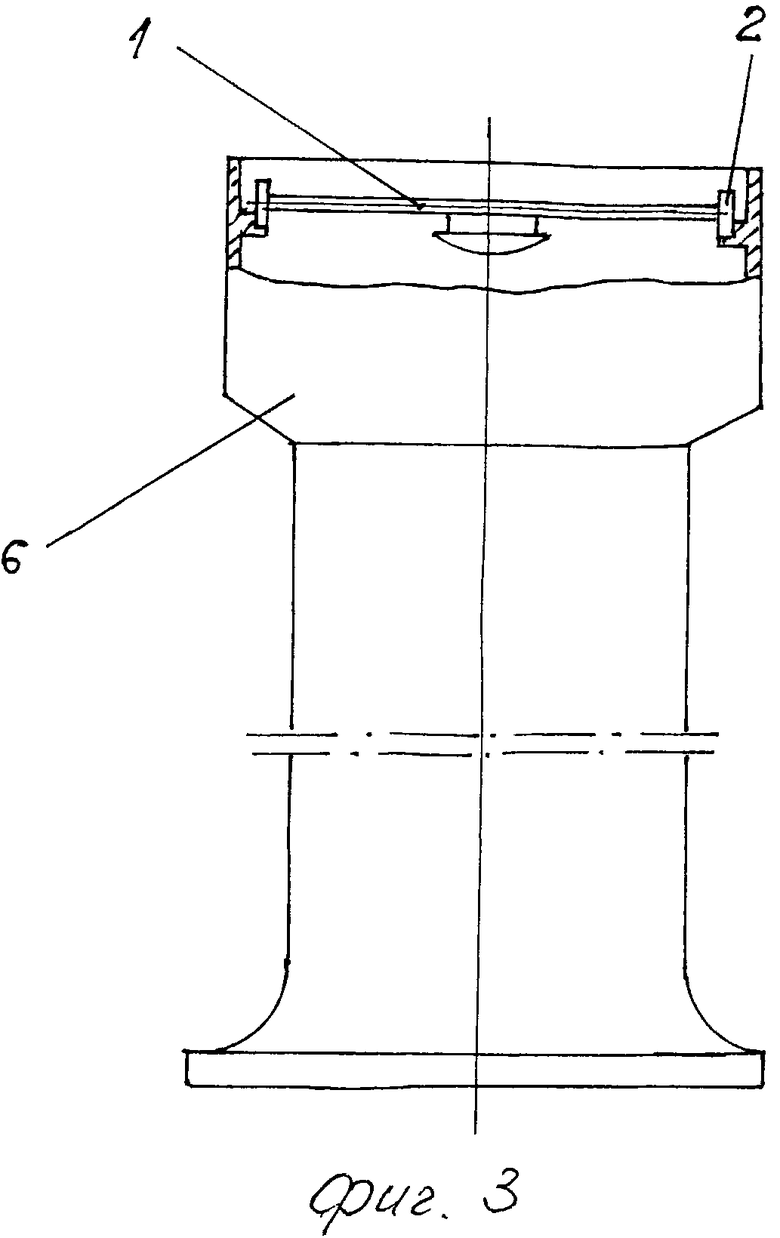
На фиг.3 представлен нактоуз магнитного компаса с установленным держателем датчика магнитометра в разрезе.
На фиг.4 представлен нактоуз компаса с держателем датчика магнитометра и датчиком, установленным в держателе, вид сверху.
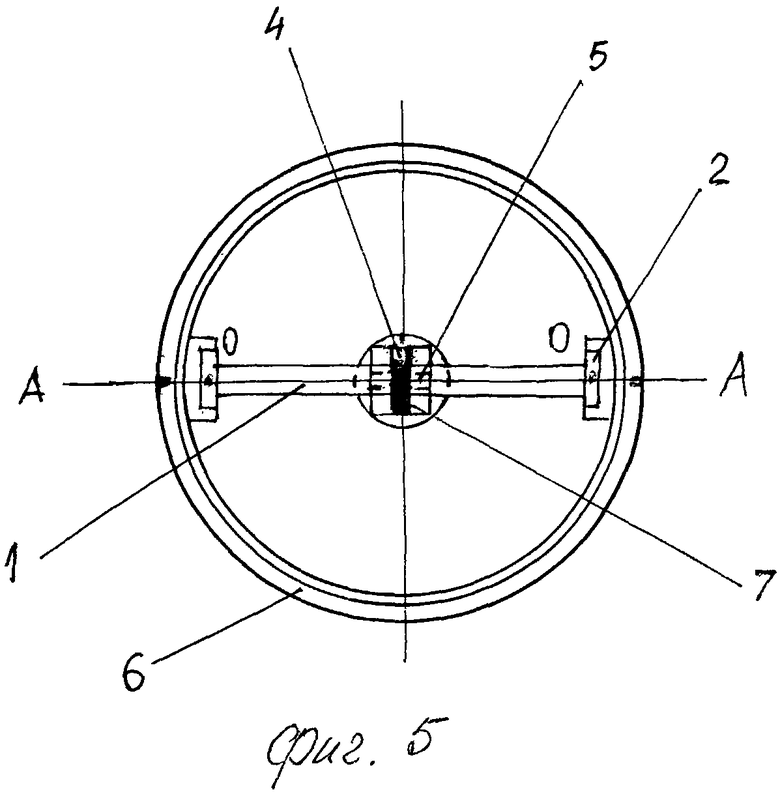
На фиг.5 представлен нактоуз компаса с держателем датчика магнитометра и датчиком, установленным в держателе, вид сверху.
На фиг.4 и 5 обозначены: АА - продольная плоскость нактоуза компаса, совпадающая с диаметральной плоскостью корабля (судна); О - центр симметрии опоры держателя датчика магнитометра.
Предлагаемый держатель датчика магнитометра содержит (см. фиг.1) корпус 1, две опоры 2, выполненные в виде подшипников, аналогичных подшипникам карданного кольца штатного котелка магнитного компаса, груз 3.
В держателе (см. фиг.2) выполнены два гнезда 4 и 5 для размещения датчика магнитометра. Груз 3 (см. фиг.1) обеспечивает горизонтирование осей симметрии гнезд 4 и 5 и, соответственно, датчика магнитометра, размещенного в гнезде держателя.
Конструкция держателя датчика магнитометра обеспечивает (см. фиг.3) при его установке в нактоуз компаса 6 (вместо штатного котелка компаса), положение гнезд 4 и 5 и, соответственно, датчика магнитометра, размещенного в гнезде держателя, на уровне размещения магнитной системы чувствительного элемента демонтированного штатного котелка компаса.
Два гнезда 4 и 5 для размещения датчика магнитометра 7 (см. фиг.4 и 5) выполнены таким образом, что продольная ось симметрии гнезда 5, а следовательно, и датчика 7, размещенного в гнезде 5 держателя (фиг.4), совпадает с продольной плоскостью АА нактоуза 6 компаса, проходящей через центры симметрии ОО опор 2, и с диаметральной плоскостью корабля (судна).
Ось симметрии гнезда 4 держателя, а следовательно, и датчика магнитометра 7, размещенного в гнезде 4 (фиг.5), совпадает с плоскостью, перпендикулярной продольной плоскости АА нактоуза 6, и диаметральной плоскости корабля (судна).
Предлагаемые способ и устройство для его обеспечения осуществляют следующим образом.
До начала работ на корабле (судне) измеряют горизонтальную составляющую индукции магнитного поля Земли H в береговых условиях с помощью магнитометра, содержащего датчик, соединительный шланг, блок электроники с автономным питанием.
Для этого размещают датчик магнитометра продольной осью симметрии горизонтально, включают магнитометр (блок электроники) и при азимутальном повороте датчика находят максимальное значение индукции магнитного поля Земли по показаниям индикатора блока электроники.
Затем производят работы на ошвартованном корабле (судне).
Определяют значение курса K ошвартованного корабля (судна) по показанию гирокурсоуказателя (истинному курсу) с учетом магнитного склонения d в районе работ путем вычитания d от значения истинного курса.
Берут из корабельного (судового) формуляра компаса значение коэффициента экранирования компаса λ, обусловленное влиянием корабельных (судовых) стальных конструкций.
Демонтируют из нактоуза эксплуатируемого компаса его штатный котелок с карданным кольцом и устанавливают вместо него держатель датчика магнитометра опорами на опоры для внешних осей карданного кольца котелка в нактоузе.
Размещают датчик магнитометра в гнезде корпуса держателя, ось симметрии которого совпадает с вертикальной плоскостью, проходящей через центры симметрии опор держателя.
Включают магнитометр (блок электроники) и измеряют значение первой компоненты горизонтальной составляющей индукции суммарного магнитного поля Земли и корабля (судна) по показаниям индикатора магнитометра (блока электроники).
Если полученное значение индукции отличается от значения λH cosK, с помощью штатного компенсатора полукруговой девиации компаса перемещением (или вращением, в зависимости от конструктивного исполнения) магнитов, компенсирующих продольную составляющую индукции магнитного поля корабля (судна), изменяют значение первой компоненты индукции суммарного магнитного поля до значения λH cosK.
Затем извлекают датчик магнитометра из продольного гнезда корпуса держателя и размещают его в поперечном гнезде, ось симметрии которого совпадает с вертикальной плоскостью, перпендикулярной вертикальной плоскости, проходящей через центры опор держателя.
Включают магнитометр (блок электроники) и измеряют значение второй компоненты горизонтальной составляющей индукции суммарного магнитного поля Земли и корабля (судна) по показаниям индикатора магнитометра (блока электроники).
Если полученное значение индукции отличается от значения - λH sinK, с помощью компенсатора полукруговой девиации компаса перемещением (или вращением) магнитов, компенсирующих поперечную составляющую индукции магнитного поля корабля (судна), изменяют значение второй компоненты индукции суммарного магнитного поля до значения - λH sinK.
Предлагаемое изобретение по сравнению с прототипом обеспечивает
- возможность уничтожения полукруговой девиации магнитного компаса без использования дефлектора,
- уменьшение погрешности уничтожения полукруговой девиации за счет уменьшения погрешности измерения индукции магнитного поля, так как магнитометр измеряет индукцию магнитного поля в стандартных единицах измерения (микротеслах), а дефлектор - в условных «дефлекторных» единицах, причем шкала дефлектора не линейна,
- уменьшение затрат времени, расходуемого на уничтожение девиации, за счет сокращения времени измерений индукции магнитного поля, поскольку измерение индукции магнитометром осуществляется непосредственно после его включения, тогда как измерение дефлектором требует ручного регулирования положения измерительного магнита дефлектора до достижения определенного положения чувствительного элемента компаса, имеющего значительную инерционность,
- держатель датчика магнитометра обеспечивает возможность размещения датчика магнитометра в нактоузе компаса после демонтажа штатного котелка компаса в горизонтальной плоскости, причем ось симметрии датчика размещается на уровне магнитной системы чувствительного элемента демонтированного штатного котелка компаса в диаметральной плоскости корабля (судна) или плоскости, перпендикулярной к диаметральной плоскости корабля (судна).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 2007 |
|
RU2338157C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| БЕЗЫНДУКЦИОННЫЙ СДВОЕННЫЙ ШИРОТНЫЙ КОМПЕНСАТОР | 2001 |
|
RU2239786C2 |
| МАГНИТНЫЙ КОМПАС | 1999 |
|
RU2161776C2 |
| МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2323413C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Устройство для уничтожения креновойдЕВиАции | 1979 |
|
SU842406A1 |

Изобретение относится к измерительной технике и предназначено для уничтожения полукруговой девиации магнитных компасов. Технический результат - повышение точности. Для достижения данного результата осуществляют компенсацию полукруговой девиации на одном магнитном курсе, способ включает определение коэффициента λ экранирования горизонтальной составляющей индукции магнитного поля Земли элементами корабля (судна), измерение на берегу горизонтальной составляющей Н индукции Земного магнитного поля, вычисление силы λH, определение магнитного курса К корабля (судна) и уничтожение полукруговой девиации компаса на одном магнитном курсе магнитами штатного компенсатора полукруговой девиации компаса. При этом измерение продольной и поперечной составляющих индукции суммарного магнитного поля Земли и корабля осуществляют магнитометром с помощью держателя датчика магнитометра, обеспечивающего размещение датчика в нактоузе магнитного компаса взамен демонтированного штатного котелка компаса. 2 н.п. ф-лы, 5 ил.
1. Способ уничтожения полукруговой девиации на одном магнитном курсе, включающий определение коэффициента λ экранирования горизонтальной составляющей индукции магнитного поля Земли элементами конструкции корабля (судна) в области магнитного чувствительного элемента компаса, измерение на берегу горизонтальной составляющей H индукции Земного магнитного поля, вычисление силы λH, определение магнитного курса K корабля (судна), уничтожение полукруговой девиации магнитами компенсатора полукруговой девиации компаса, отличающийся тем, что для уничтожения полукруговой девиации на одном магнитном курсе с помощью держателя датчика магнитометра демонтируют котелок компаса со штатного места в нактоузе компаса, устанавливают (опорами) на штатное место котелка держатель датчика магнитометра, размещают датчик магнитометра в гнезде корпуса держателя, ось симметрии которого совпадает с вертикальной плоскостью, проходящей через центры симметрии опор держателя, измеряют магнитометром значение первой компоненты горизонтальной составляющей индукции суммарного магнитного поля Земли и корабля (судна), изменяют измеренное значение первой компоненты индукции суммарного магнитного поля перемещением магнитов штатного компенсатора полукруговой девиации компаса, компенсирующих продольную составляющую индукции магнитного поля корабля (судна), до значения λH·cosK, размещают датчик магнитометра в гнезде корпуса держателя датчика магнитометра, ось симметрии которого совпадает с вертикальной плоскостью, перпендикулярной вертикальной плоскости, проходящей через центры опор держателя, измеряют магнитометром значение второй компоненты индукции суммарного магнитного поля Земли и корабля (судна), изменяют измеренное значение второй компоненты индукции суммарного магнитного поля перемещением магнитов штатного компенсатора полукруговой девиации компаса, компенсирующих поперечную составляющую магнитного поля корабля (судна) до значения -λH·sinK.
2. Держатель датчика магнитометра, содержащий корпус с гнездом для датчика, опору для установки корпуса с датчиком, отличающийся тем, что опора держателя выполнена в виде подшипников, обеспечивающих установку датчика в нактоуз магнитного компаса на месте демонтированного штатного котелка компаса, держатель снабжен грузом, обеспечивающим горизонтирование датчика магнитометра в нактоузе компаса, при этом положение продольной оси симметрии датчика совпадает с горизонтальной плоскостью размещения центра симметрии магнитной системы магнитного чувствительного элемента штатного котелка компаса в нактоузе, а центр симметрии датчика совпадает с положением центра симметрии магнитной системы чувствительного элемента штатного котелка компаса в нактоузе.
| Девиация магнитного компаса./В.П.КОЖУХОВ, В.В.ВОРОНОВ, В.В.ГРИГОРЬЕВ | |||
| Морской транспорт | |||
| - Л., 1960, с.140-150 | |||
| RU 97105109 A, 27.03.1999 | |||
| БЕЗЫНДУКЦИОННЫЙ СДВОЕННЫЙ ШИРОТНЫЙ КОМПЕНСАТОР | 2001 |
|
RU2239786C2 |
| DE 3345818 A1, 27.06.1985 | |||
| Способ определения полукруговой девиации | 1987 |
|
SU1434258A1 |
| RU 96102097 A, 10.05.1998. | |||

