Изобретение относится к грузоподъемным средства., в частности к устройствам для вертикального перемещения объектов.
Известны устройства для вертикального перемещения объекта, содержащие пространственные опоры iB виде установленны.х на колоннах поперечных балок и канато-блочную систему, включающую разомкнутые и замкнутые стропы и силовой привод.
Цель изобретения упрощение конструкции и обеспечение ориентирования объекта при опускании.
Для этого в предлагаемом устройстве канато-блочная система снабжена уравнительными переходиками, каждый из которых связан с разомкнутым и замкнутым стропами, причем разо.мкнутые стролы запасоваеы в направляющих блоках и соединены с объектом, а замкнутые строны запасованы в группе направляющих блоков и соединены своей средней частью, образованной -в виде петли, со щтоком силового цилиндра, при этом свободные концы разомкнутых стропов и средняя часть за.мкнутого стропа зафиксированы ко;нтрольными зажимами.
Кроме того, контрольный зажим выполнен в виде пластин, сжимающих строп посредством болтового соединения, в зазоре между которыми установлены сквозные направляющие и изгибающие канат пальцы.
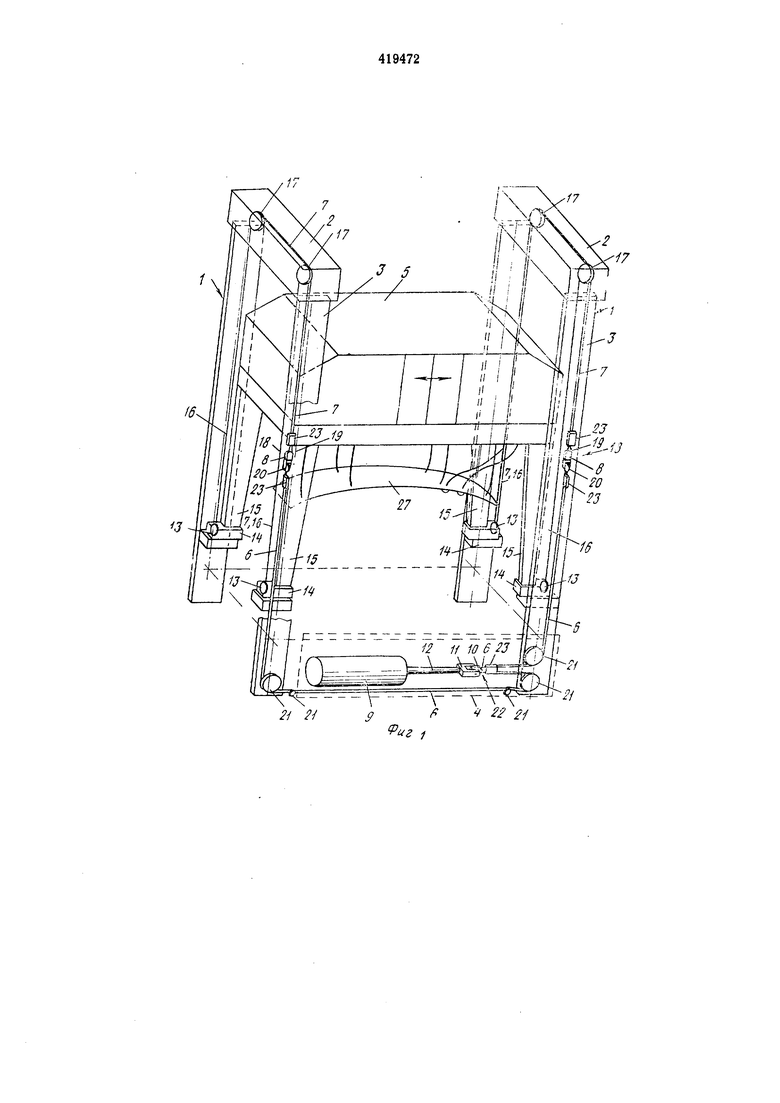
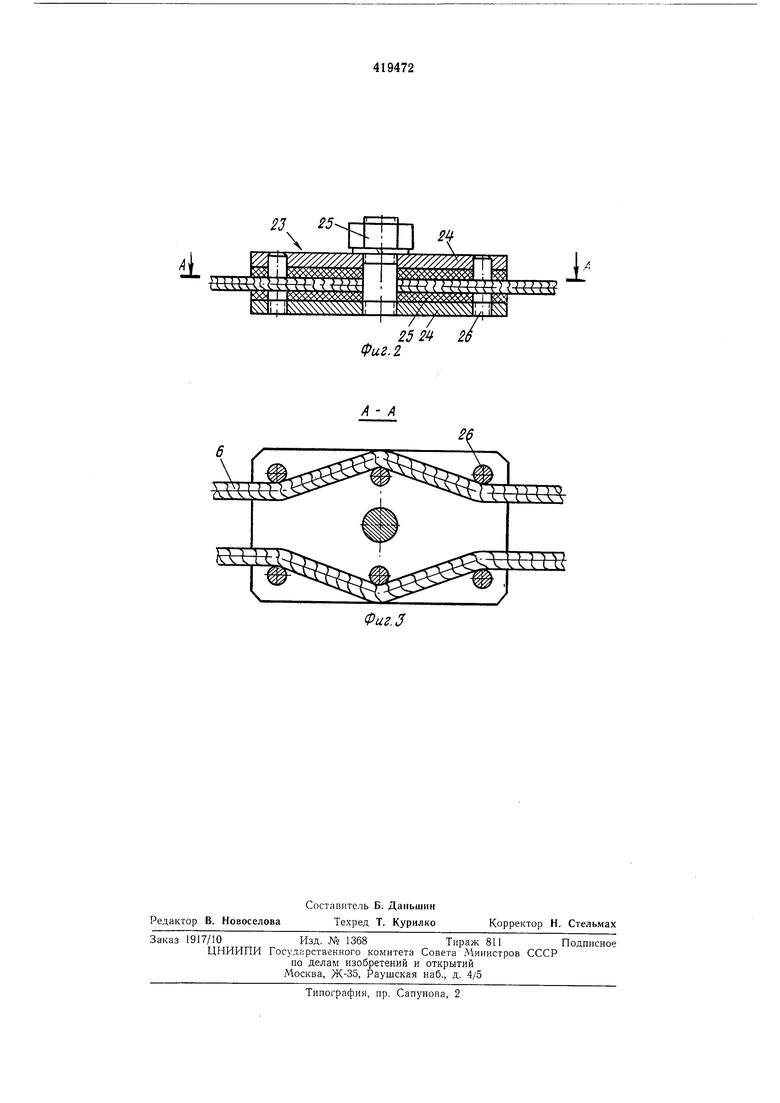
На фиг. 1 показана схема нредлагаемого устройства; на фиг. 2 - конструкция контрольного зажима стропов; на фиг. 3 - разрез (НО А-А 1на фиг. 2.
Устройство содержит две П-образные стойки 1 коробчатой формы. Элементы канатоблочной систе.мы расположены внутри балок 2, колонн 3 и в нрия.мке 4. Пере.мещаемый объект 5, например многоэлектродный электрозакленочный автомат 44А1, помещен в нромежутке между стойками 1. Канато-блочная система включает замкнутый строп 6 и два разомкнутых стропа 7. Каждый строп 7 соединен со строном б посредством уравнительного нереходика 8. Силовой привод канато-блочной системы выполнен в виде силового цилиндра 9, установленного в нриямке 4 и воздействующего на канато-блочную систему посредством пары соосных уравнительных
коушей 10, закрепленных к вилке 11 щтока 12 цилиндра 9. Концевые коущп 13 стропа 7 прикреплены к основання.м 14 ног 15 объекта 5, Благодаря этому максимально увеличена .тлина конечных рабочнх ветвей 16 стропа
7, что облегчает горизонтальное неремещение подвещенного объекта 5, т. е. позволяет осуществлять его ориентирование по неподвижному изделию (пе иоказаи). Ветви 16 стропа 7 перекинуты через направляющие двухручьевые блоки 17, петля 18 стропа 7 охватывает
верхний коуш 19 уравнительного переходика 8. Коуш 19, как и другие уравнительные коуши 10 и 20 (нижний коуш переходика 8) выполнен в виде небольших блоков (в форме болтовых коушей) с возможностью поворота на осн. Переходик 8 представляет собой две вилкн с коушами, соединенные шарзшрпо основаниями друг к другу. Коуш 20 повернут на шарнире -по отношению к коушу 19 на 90°. Конечные петли замкнутого стропа 6 охватывают коуши 20 переходиков 8, далее проходят |ПО группе направляюших двухручьевых блоков 21 и охватывают ларой петель 22 пару тянуших блоков 10 привода. У каждого уравнительного коуша (10, 19, 20) имеется контрольный зажим 23. У коушей 10 этот зажим выполнен парным в едином корпусе. Каждый зажим 23 имеет две пластины 24, которые сжимают канат с помощью болтового соединения 25, а в зазоре между пластинами установлены сквозные пальцы 26 (это могут быть шлильки), которые направляют и изгибают канат при прохождении его сквозь зажим 23. Для каждой ветви каяата, по меньшей мере, имеется три пальца 26. Такое устройство зажима разрешает плавно изменять усилие фиксации каната и позволяет частичное проскальзывание ветвей каната в зажиме 23 при выборке неравномерностей в растяжении отдельных ветвей стролов. Каждая пластина 24 снабжена эластичной подкладкой 25 для более равномерного сжатия канатов и недопущения вредных для канатов деформаций сечения.
Канато-блоЧная система обеспечивает равномерность натяжения всех ветвей стропов, установку длин стропов без специальных натяжных механизмов.
Устройство работает следующим образом.
При монтаже или ремонте выполняют регулировку длин стронов и обеспечивают .равиомерность усилий натяжения. Для этой цели ослабляют зажимы 23, закрепляют объект 5 в каком-либо правильном положении и включают силовой цилиндр 9. При натяжке петлей 22 осуществляется натяжка всех ветвей стролов с поворотом уравнительных коушей 10, 19, 20. После выборки всех люфтов в канатоблочной системе контрольные зажимы 23 плотно зажимаются, фиксируя достигнутое положение.
После этого устройство готово к работе. Объект 5 освобоЖлДается, и лри включении силового цилиндра 9 коуши 10 перемещаются влево, переходики 8 опускаются вниз, коуши 13 параллельно поднимаются вверх, поднимая объект 5.
Устройство имеет жесткую фиксацию объекта 5 в верхнем положении. Это осуществляется известными нриводны.ми нли неприводными фиксаторами. Устройство предусматривает также изменение скорости перемещения объекта на крайних участках подъема и опускания носредством путевого дросселирования, которое осуществляется лосредством специального копира, укрепленного на вилке 11 и непосредственно воздействующего на пневмоаппаратуру (на чертеже не показаны).
Для ориентирования при опускании aiBTOмат 44А1 снабжен специальными, клиновыми упорами (на чертеже не показаны), взаимодействующими с кромками свариваемого изделия. При этом взаимодействии автомат плавно отклоняется в необходимую сторону и точно ориентируется по изделию.
Предмет изобретения
1.Устройство для вертикального перемещения объекта, содержащее пространственные
опоры в виде установленных на колоннах поперечных балок и канато-блочную систему, включающую разомкнутые и замкнутые стропы и силовой привод, отличающееся тем, что, с целью упрощения конструкции и обеспечения ориентирования объекта при опускании, канато-блочная система снабжена уравнительными переходиками, каждый из которых связан с разомкнутым и замкнутым стропами, причем разомкнутые стропы запасованы в направляющих блоках и соединены с объектом, а замкнутые стропы запасованы в группе направляющих блоков и соединены своей средней частью, образованной в виде петли, со штоком силового , при
этом свободные концы разомкнутых стропов и средняя часть замкнутого стропа зафиксированы контрольными зажимами.
2.Устройство но п. 1, отличающееся тем, что контрольный зажим выполнен в виде
пластин, сжимающих строп посредством болтового соединения, в зазоре между которыми установлены сквозные направляющие и изгибающие канат пальцы.
V // 2i
17
27
М
/
252
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для изготовления стропов сплетением | 1985 |
|
SU1280071A1 |
| УСТРОЙСТВО ДЛЯ ЗАТЯГИВАНИЯ УЗЛА ВЕРЕВКИ ПОЖАРНОЙ СПАСАТЕЛЬНОЙ В КОУШЕ | 2021 |
|
RU2789869C1 |
| Привод перемещения тележки протаскивающего механизма сучкорезной машины | 1979 |
|
SU867649A1 |
| Устройство для гибки стального каната в петлю | 1975 |
|
SU539109A2 |
| Стабилизирующее устройство механизма подъема кровли цилиндрического резервуара | 1985 |
|
SU1255703A1 |
| МЕХАНИЧЕСКИЙ САМОСПАСАТЕЛЬ БОБРОВСКИХ | 2009 |
|
RU2401140C1 |
| СПИРАЛЬНЫЙ ЗАЖИМ | 2017 |
|
RU2656852C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОЙ УБОРКИ ПРОСЫПИ ИЗ ПОДКОНВЕЙЕРНОГО ПРОСТРАНСТВА | 2008 |
|
RU2352511C1 |
| САМОСПАСАТЕЛЬ БОБРОВСКИХ ДЛЯ ЭКСТРЕННОЙ САМОЭВАКУАЦИИ ЧЕЛОВЕКА С ВЫСОТНЫХ НАЗЕМНЫХ И НАДВОДНЫХ ОБЪЕКТОВ, ЧЕРЕЗ ОКНО, С БАЛКОНА (ЛОДЖИИ) ЖИЛЫХ ДОМОВ, ПРОМЫШЛЕННЫХ И ОФИСНЫХ ЗДАНИЙ, А ТАКЖЕ ДЛЯ РУЧНОЙ, АВТО- И АВИАТРАНСПОРТИРОВКИ ОБЕЗДВИЖЕННЫХ ПО РАЗНЫМ ПРИЧИНАМ ЛЮДЕЙ | 2007 |
|
RU2372952C2 |
| ОДНОКАНАТНАЯ ДОРОГА ДЛЯ ПЕРЕДАЧИ ГРУЗОВ | 1973 |
|
SU370106A1 |