1
Устройство относится к системам автоматического контроля и регулирования.
Известны преобразователи угла поворота вала в импульсный сигнал, содержащие двигатель, на валу которого закреплен модулирующий диск с магнитными метками, против которых расположена считывающая головка, пОхТ.ключенная через усилитель и формироратель к триггеру. Выход триггера соединен с одним входом логического элемента «И, к другому входу которого подключены щетки токосъемника, расположенного на валу двигателя. На входном валу преобразователя закреплен диск с магнитными метками.
Предложенное устройство отличается тем, что в него введены дополнительные логический элемент «И, усилители, формирователи, неподвижный диск с магнитными метками и две считывающие головки, расположенные на кронштейне, закрепленном на модулирующем диске. Одна дополнительная считывающая головка расположена против магнитных меток неподвижного диска, а другая дополнительная считывающая головка - против магнитных меток диска, закрепленного на входном валу. Дополнительные считывающие головки через дополнительные усилитель и формирователь подключены ко входам допол-нительного логического элемента «И, выход которого соединен со щетками токосъемника.
Такое выполнение устройства повышает надежность его работы.
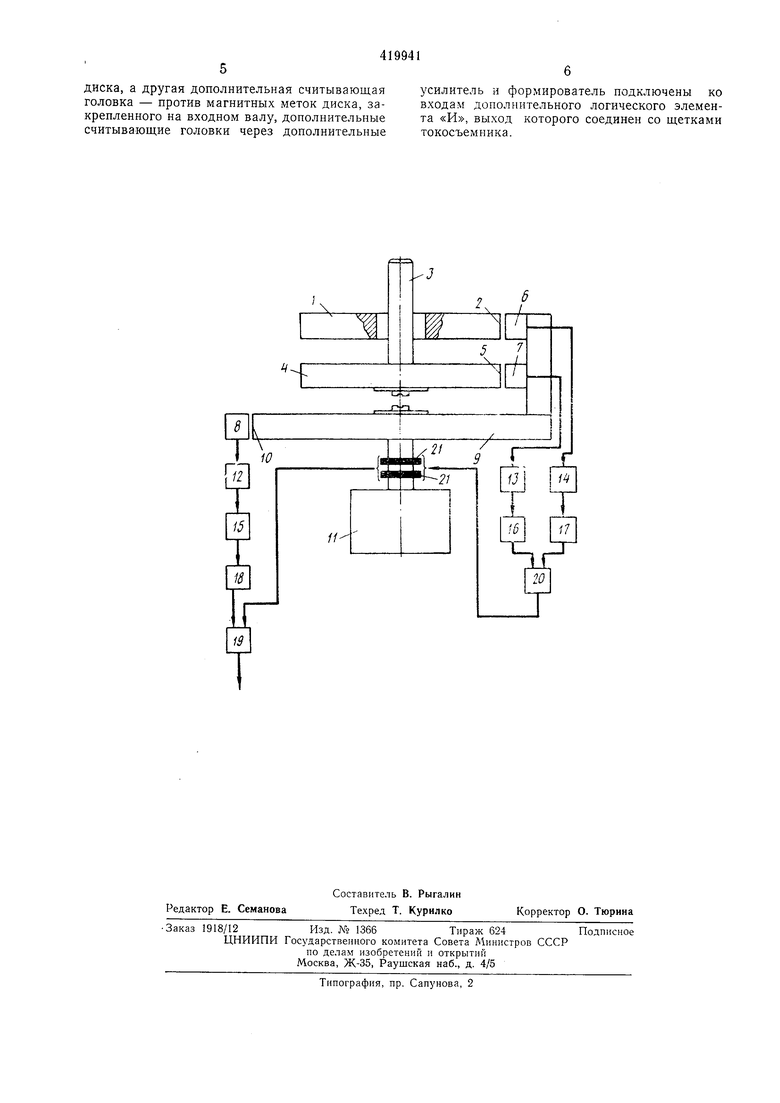
На чертеже приведена схема предложенного устройства.
Преобразователь угла поворота вала в импульсный сигнал содержит неподвижный диск 1, на поверхности которого в зоне 2 нанесены магнитные метки, входной вал 3 с диском 4, на новерхности которого в зоне 5 нанесены
магнитные метки, магнитные головки б-8, диск 9 с магнитными метками в зоне 10, закренленнып на валу двигателя 11, усилители 12-14, формирователи 15 - 17, триггер 18, логические элементы «И 19 и 20 и токосъемник 21.
На новерхиости неподвижного магнитного диска 1 в зоне 2 нанесены (zi - 1) магнитных меток. На входной вал 3, угол поворота которого измеряется, насажен магнитный диск 4,
имеющий в зоне 5 метки, количество которых, больше количества меток зоны 2 неподвижного диска, например, на единицу, т. е. Zi.
Следовательно, магнитные метки зон 2 и 5 образуют пониусную комбинационную картину.
Воспроизведение сигналов магнитных меток зон 2 и 5 производится соответственно магнитными головками 6 и 7, установленными на магнитном диске 9, который производится во
вращение модулирующим двигателем 11 с постоянпой скоростью. Сигналы головок 6 и 7 усиливаются усилителями 13 и 14 и формируются формирователями 16 и 17 в узкие импульсы, которые поступают в логический элемент «И 20. Усилители 13 и 14, формирователи 16 и 7 и логический элемент «И 20 установлены на вра пагоп1,емся диске 9. На этом диске в зоне 10 нанесены магнитные метки, сигналы которых воспроизводятся неподвижной магнитной головкой 8, усиливаются усилителем 12, формируются формирователем 15 в узкие импульсы и поступают в триггер 18. Сигналы от логического элемента «И 20 через токосъемник 21 от триггера 18 поступают в логический элемент «И 19.
Преобразователь работает следующим образом.
При вращении вала двигателя 11 магнитные головки 6 и 7 воспроизводят сигналы магнитных меток дисков 1 и 4. Из-за разности частот, обусловленной различием в количестве меток дисков 1 и 4, выходные импульсы формирователя 16 непрерывпо смещаются во времени относительно выходных импульсов формирователя 17. При одновременном поступлении сигналов на оба входа, т. е. при совпадении меток дисков 1 и 4, логический элемент «И 20 срабатывает, и на его выходе появится импульс.
При неподвижном диске 4 логический элемент «И 20 срабатывает один раз за полный оборот диска 9 всегда при одном и том же взаимном положении дисков 1, 4 и 9.
Таким образом, угловая частота выходных импульсов логического элемеита «И 20 определяется скоростью вращения модулирующего двигателя 11, т. е. равна сод. При взаимном повороте дисков 1 и 4 точка на периферии диска }, соответствующая совпадению меток обоих дисков, перемещается по окружности диска I. Повороту диска 4 на один щаг, соответствующий расстоянию между двумя его метками, соответствует нолный оборот точки совпадения меток. Следовательно, угол поворота фк ко.мбинационной картины больше угла поворота.фв вала 3 в Zi раз, т. е.
/ «-.(---TB Логический элемент «И 20 срабатывает один раз за оборот диска 9, но при другом взаимном, расположении дисков 1, 4 и 9. Положение диска 9, соответствующее моменту срабатывания элемента «И 20, повернуто но сравнению с первоначальным на угол, равный углу поворота комбинационной картины. На эту-же величину изменится фаза выходного импульса логического элемента «И 20. Таким образом,:частота выходных импульсов логическоро.элемента «Н 20 определяется скоростью вращения модулирующего двигателя 11, а фаза - углом поворота вала 3, увеличенны.м в 2;i;pa3.. . ,
При вр:ащении двигателя 11 также воспроизводятся, сигналы магнитных меток диска 9 неподвижной головки 8. Импульсы от магнитной головки 8 через усилитель 12, формирователь 15, триггер 18 поступают в логический элемент 19, который срабатывает при одновременном ноступлении в него сигналов от логического элемента «И 20 и триггера 18.
Так как за один оборот диска 9 вырабатывается один импульс логического элемента «И 20, то при выполнении условия:
О.-
,,
где Z2 - количество меток на диске 9, логический элемент «И 19 сравнивает взаимное положепие импульса элемента «И 20 и определяемого одной и той же магнитной меткой на диске 9 импульса триггера 18.
При вращении вала 3 комбинационная картина, образованная метками дисков 1 и 4, вращается относительно диска 1 со скоростью
-SiCuB, где сов - угловая скорость вращения входного вала. В результате этого изменится угловая частота импульсов па выходе логического элемента «И 20, которая равна о)д±21«в, где знак «-т- или «- онределяется нанравлением вращения диска 4 относительно диска 9. Следовательно, происходит смещение во времени импульса логического элемента «И 20 относительно импульса триггера 18 со скоростью ZICUE. В результате
сравнепия взаимного положения этих импульсов па выходе логического элемента «И 19 нолучается пачка импульсов при наличии сигнала от триггера 18 и пауза - при отсутствии. Угловая частота следовапия пачек
ш - z.,
а фаза
-р 2;429B
Последние выражения показывают, что преобразователь производит масштабное преобразование угла поворота входпого вала 3.
Предмет изобретения
Преобразователь угла поворота вала в импульсный сигнал, содержащий двигатель, на валу которого закреплен модулирующий диск с магнитными метками, против которых расположена считывающая головка, подключенпая через усилитель и формирователь к триггеру, выход триггера соединен с одним входом логического элемента «И, к другому входу которого подключены щетки токосъемника, расположенного на валу двигателя, причем на входном валу преобразователя закреплен диск с магнитными метками, отличающийся тем, что, с целью повышения надежности работы преобразователя, в него введены донолнительные логический элемент «И, усилители, формирователи, неподвижный диск с магнитными метками и две считывающие головки, расположенные на кронштейне, закрепленном На модулирующем диске, причем одна дополнительная считывающая головка распо- ложена против магнитных меток неподвижного
диска, а другая дополнительная считывающая головка - против магнитных меток диска, закрепленного на входном валу, дополнительные считывающие головки через дополнительные
усилитель и формирователь подключены ко входам дополнительного логического элемента «И, выход которого соединен со щетками токосъемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в интервалы времени | 1989 |
|
SU1661999A1 |
| Многооборотный преобразователь угол - код | 1990 |
|
SU1711329A1 |
| Устройство для контроля угловых деформаций валов вращающихся объектов | 1986 |
|
SU1384932A1 |
| Преобразователь угол-код | 1987 |
|
SU1474844A2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДЛИНЫ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО МАТЕРИАЛА | 1970 |
|
SU260907A1 |
| Система измерения длины запаса линейного материала | 1982 |
|
SU1061870A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ИЗДЕЛИЙ | 1999 |
|
RU2163003C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1997 |
|
RU2137296C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОСУДОВ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 1970 |
|
SU277821A1 |
//
и i
-21
-TTJ
