1
Изобретение относится к области измерительной техники, а именно к измерению угловой погрешности положения штрихов лимба.
Известен способ измерения угловой погрешности положения штрихов лимба, заключаюш,ийся в том, что лимб врашают под двумя расположенными на противоположных концах его диаметра датчиками сигналов о наличии штрихов лимба.
В известном способе интервалы между штрихами, т. е. между этими сигналами, измеряют подсчетом временных сигналов, выработанных генератором импульсов стандартной частоты.
Цель изобретения - новысить точность измерений при непостоянстве скорости вращения лимба.
Для этого по предлагаемому способу с помошью датчика перемеш;ений формируют серии импульсов постоянного приращения перемещения лимба, измеряют сумму двух величин углового неремещения лимба, отсчитываемых от моментов возникновения сигналов о наличии штрихов лимба до момента формирования следующего за носледним из этих сигналов импульса приращения перемещения лимба, и вычитают из полученной суммы значение постоянного приращения неремещения лимба.
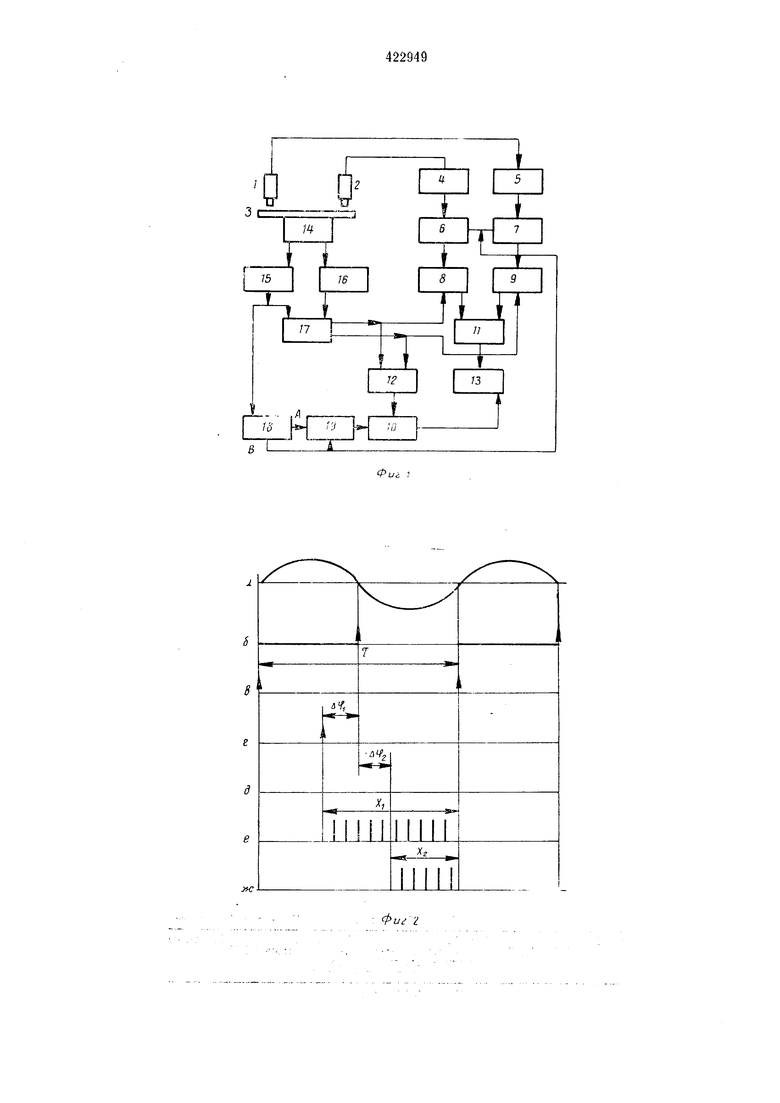
На фиг. 1 изображена блок-схема устройства для измерения угловой погрешности положения штрихов лимба по предлагаемому способу; на фиг. 2 приведена временная диаграмма измерения лимба.
Устройство содержит датчики 1, 2 сигналов о наличии штрихов нроверяемого лимба 3, формирователи 4, 5 сигналов датчиков 1, 2, триггеры 6, 7 управления прямым счетом, ячейки 8-10 совпадения, ячейки «ИЛИ 11,
12, реверсивный счетчик 13, датчик 14 углового перемещения, усилители 15, 16, блок 17 внутришагового деления, формирователь 18 двух сдвинутых между собой на полшага серий импульсов постоянного приращения перемещения лимба 3, триггер 19 управления обратным счетом. Выходы А, Б формирователя 18 служат для выдачи двух указанных серий сигналов. Триггеры 6, 7, 19 выполнены с раздельными входами.
На временной диаграмме показаны сигнал а датчика 14, имлульсы бив формирователя 18, сигналы гид датчиков 1, 2, сигналы е и ж блока 17 на измеряемых интервалах Xi и Xz углового перемещения лимба.
Предлагаемый способ измерения погрешности штрихов лимба заключается в следующем.
Лимб 3 вращают иод двумя расположенными на противоположных концах его диаметра
датчиками 1, 2 сигналов о наличии щтрихов
лимба. С помощью датчика 1, 2, усилителей 15, 16 и блока 17 формируют две сдвинутые между собой серии измерительных импульсов. С помощью датчиков 1, 2, формирователей 4, 5, триггеров 6, 7, ячеек 8, 9 совпадения, ячейки «ИЛИ 11, счетчика 13 и блока 17 измеряют сумму величин Х и Х2 углового перемещения лимба 3.
.Величину Xi отсчитывают от момента возникновения сигнала г о наличии штрихов лимба на выходе датчика 1 до момента формирования иервого следующего за этим сигналом г имиульса в постоянного приращения перемещения лимба.
Величину Х2 отсчитывают от момента возникновения сигнала д о наличии штрихов лимба на выходе датчика 2 до момента формирования иервого за этим сигналом д импульса в постоянного приращения перемещения лимба,.
Измерение суммы величин Xi и Xz производится следующим образом.
Сигналы г и д от датчиков 1 и 2 через формирователи 4, 5 устанавливают триггеры 6, 7 в состояние единицы. Вследствие этого измерительные импульсы двух сдвинутых между еобой серий от блока 17 через ячейку «ИЛИ II поступают на суммирующий вход реверсивного счетчика 13, в котором формируется сумма количеств импульсов обеих серий, поступивших от блока 17. В момент формирования первого импульса в, следующего за сигналами гид, формирователь 18 возвращает триггеры 6, 7 в состояние нуля и устанавливает триггер 19 в состояние единицы. Вследствие этого измерение суммы величин Xi и Xz заканчивается, а импульсы обеих серий от блока 17 через ячейку «ИЛИ 12 и ячейку 10 совпадения поступают на вычитающий вход реверсивного счетчика 13 до момента возникновения первого импульса б па выходе формирователя 18, т. е. счетчик 13 работает в реX
жиме вычитания в течение времени -, где т -
период импульсов виг, соответствующий шагу датчика 14. За это время из содержимого счетчика 13 вычитается величина, пропорциональная т, после чего в счетчике 13 формируется результат Дф, равный искомой погрещпости штрихов лимба:
А((,+,-т);(1)
где k - коэффициент;
(2) (3)
л-1 : A-pi + Y «2 ± ДТа + -у
Подставив (2), (3) в (1), получим (Дср, ±Д(р,).
Предмет изобретения
Способ измерения угловой погрешности положения штрихов лимба, заключающийся в
том, что лимб вращают под двумя расположенными на противоположных концах его диаметра датчиками сигналов о наличии штрихов лимба, отличающийся тем, что, с целью повышения точности измерений при
пепостояпстве скорости вращения лимба, с помощью датчика перемещений формируют серии импульсов постоянного приращения перемещения лимба, измеряют сумму двух величии углового перемещения лимба, отсчитываемых От моментов возникновения сигналов о наличии штрихов лимба до момента формирования следующего за последним из этих сигналов импульса приращения перемещения лимба, и вычитают из полученной суммы значепие постоянного приращения перемещения лимба.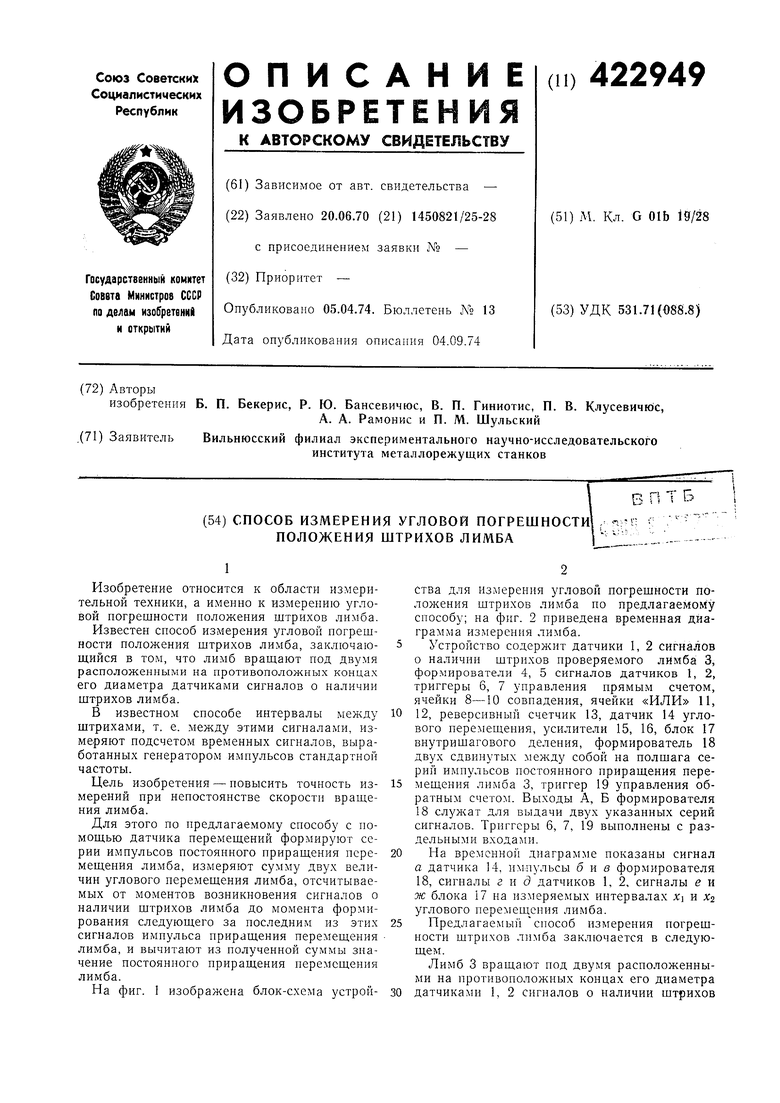
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой измеритель скорости истечения текучих и сыпучих материалов | 1987 |
|
SU1427182A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Фазоизбирательное устройстводля дВигАТЕля ВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU807112A1 |
| Способ измерения угловой погрешности положения штрихов лимба | 1986 |
|
SU1326884A1 |
| Способ считывания графической информации | 1976 |
|
SU741290A1 |
| Устройство для измерения параметров внутрицилиндрового давления двигателей внутреннего сгорания | 1980 |
|
SU934261A1 |
| Устройство для диагностики дизеля | 1985 |
|
SU1270607A1 |
| Способ преобразования перемещения в код и устройство для его осуществления | 1984 |
|
SU1269260A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 1969 |
|
SU249798A1 |
| Импульсный преобразователь перемещения | 1981 |
|
SU985808A1 |